一种应用于海洋自主任务的智能无人船的制作方法
本发明属于无人船控制,尤其是一种应用于海洋自主任务的智能无人船。
背景技术:
1、随着人类活动的增加,湖泊、近海中的垃圾不断增多,对景区的观赏性,小型船只的出行安全性造成了影响,使得相关部门不得不动用大量的人力物力财力对漂浮的垃圾进行打捞收集。在打捞过程中,对于一些未知水域的了解不足,易对打捞人员的生命安全产生威胁。不仅成本高昂,而且效率低下。尤其是高温极端天气下,传统水域清洁更是难上加难。目前常见无人打捞船使用远程遥控模式,仍需要遥控人员进行干预作业,而且遥控无人船的控制距离有限,无法完成大面积水域作业。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出一种应用于海洋自主任务的智能无人船,能够结合环境信息感知系统获取的数据,进行智能路径规划,驱动船体朝着指定方向运行。
2、本发明解决其技术问题是采取以下技术方案实现的:
3、一种应用于海洋自主任务的智能无人船,包括船体、船体控制系统、环境信息感知系统、本地网络控制器、云端服务器和用户控制系统,其中环境信息感知系统安装在船体上,用于实时感知船体的自身姿态信息以及船体周围的环境信息,环境信息感知系统通过串口连接船体控制系统并进行通信,环境信息感知系统通过无线网络双向连接本地网络控制器,本地网络控制器通过无线网络双向连接云端服务器,云端服务器通过无线网络双向连接用户控制系统。
4、而且,所述船体控制系统包括主控模块、电调、无刷电机和锂电池,其中主控模块、电调、无刷电机和锂电池安装在船体中,锂电池分别连接主控模块、电调和无刷电机,主控模块、电调和无刷电机依次连接,主控模块用于接收环境信息感知系统检测的环境数据,并通过pid控制算法进行行动估算,输出对应的pwm波至电调,驱动船体的无刷电机进行运动,锂电池用于供电。
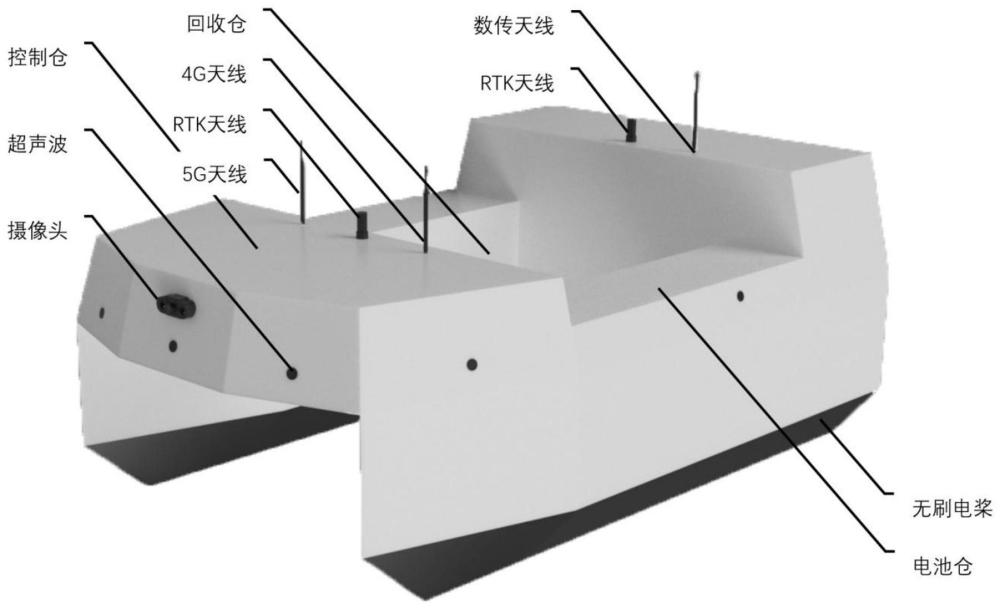
5、而且,所述环境信息感知系统包括rtk无线定位定向模组、wt901水晶yaw轴陀螺仪和四路超声波测距模块,通过rtk无线定位定向模组获取gps数据,通过wt901水晶yaw轴陀螺仪获取陀螺仪数据,通过四路超声波测距模块获取超声波数据。
6、而且,所述本地网络控制器包括嵌入式linux处理器、摄像头和5g移动通信模组,其中,嵌入式linux处理器分别连接摄像头和5g移动通信模组,5g移动通信模组用于提供数据传输通道,摄像头用于采集图像信息,嵌入式linux处理器用于环境信息感知系统的数据传输以及摄像头的图像信息传输。
7、而且,所述云端服务器采用具有公网ip的服务器,用于本地网络控制器通过内网穿透,将服务分别绑定至对应的端口中,以供用户控制系统进行数据访问。
8、而且,所述用户控制系统包括上位机及其操作软件,操作软件在上位机运行,用于对从云端服务器获取的环境信息感知系统检测数据进行查看及处理。
9、而且,用户控制系统和船体控制系统的联网模式包括5g入网模式和2.4g数传入网模式,5g模块若能检测到5g信号,船体控制系统和船体控制系统则进入5g入网模式,休眠数传模块;若5g模块不能检测到5g信号,船体控制系统和船体控制系统则进入数传入网模式,数传模块被唤醒。
10、本发明的优点和积极效果是:
11、本发明包括船体、船体控制系统、环境信息感知系统、本地网络控制器、云端服务器和用户控制系统五部分;环境信息感知系统感知周围的环境信息与自身的姿态信息,并将gps数据、陀螺仪数据、超声波数据等信息发送给船体控制系统的主控模块,将获取的摄像头图形数据推送到本地网络控制器的服务端口,本地服务通过端口映射到云端服务器端口以供人员设备进行访问;用户控制系统运行时自动绑定云服务器ip以及端口进行访问,获取船体摄像头数据,同时可下发控制指令;船体控制系统获取用户控制系统所下发的指令,同时结合环境信息感知系统获取的数据,进行智能路径规划,驱动船体朝着指定方向运行。
技术特征:
1.一种应用于海洋自主任务的智能无人船,其特征在于:包括船体、船体控制系统、环境信息感知系统、本地网络控制器、云端服务器和用户控制系统,其中环境信息感知系统安装在船体上,用于实时感知船体的自身姿态信息以及船体周围的环境信息,环境信息感知系统通过串口连接船体控制系统并进行通信,环境信息感知系统通过无线网络双向连接本地网络控制器,本地网络控制器通过无线网络双向连接云端服务器,云端服务器通过无线网络双向连接用户控制系统。
2.根据权利要求1所述的一种应用于海洋自主任务的智能无人船,其特征在于:所述船体控制系统包括主控模块、电调、无刷电机和锂电池,其中主控模块、电调、无刷电机和锂电池安装在船体中,锂电池分别连接主控模块、电调和无刷电机,主控模块、电调和无刷电机依次连接,主控模块用于接收环境信息感知系统检测的环境数据,并通过pid控制算法进行行动估算,输出对应的pwm波至电调,驱动船体的无刷电机进行运动,锂电池用于供电。
3.根据权利要求1所述的一种应用于海洋自主任务的智能无人船,其特征在于:所述环境信息感知系统包括rtk无线定位定向模组、wt901水晶yaw轴陀螺仪和四路超声波测距模块,通过rtk无线定位定向模组获取gps数据,通过wt901水晶yaw轴陀螺仪获取陀螺仪数据,通过四路超声波测距模块获取超声波数据。
4.根据权利要求1所述的一种应用于海洋自主任务的智能无人船,其特征在于:所述本地网络控制器包括嵌入式linux处理器、摄像头和5g移动通信模组,其中,嵌入式linux处理器分别连接摄像头和5g移动通信模组,5g移动通信模组用于提供数据传输通道,摄像头用于采集图像信息,嵌入式linux处理器用于环境信息感知系统的数据传输以及摄像头的图像信息传输。
5.根据权利要求1所述的一种应用于海洋自主任务的智能无人船,其特征在于:所述云端服务器采用具有公网ip的服务器,用于本地网络控制器通过内网穿透,将服务分别绑定至对应的端口中,以供用户控制系统进行数据访问。
6.根据权利要求1所述的一种应用于海洋自主任务的智能无人船,其特征在于:所述用户控制系统包括上位机及其操作软件,操作软件在上位机运行,用于对从云端服务器获取的环境信息感知系统检测数据进行查看及处理。
7.根据权利要求1所述的一种应用于海洋自主任务的智能无人船,其特征在于:所述用户控制系统和船体控制系统的联网模式包括5g入网模式和2.4g数传入网模式,5g模块若能检测到5g信号,船体控制系统和船体控制系统则进入5g入网模式,休眠数传模块;若5g模块不能检测到5g信号,船体控制系统和船体控制系统则进入数传入网模式,数传模块被唤醒。
技术总结
本发明涉及一种应用于海洋自主任务的智能无人船,包括船体、船体控制系统、环境信息感知系统、本地网络控制器、云端服务器和用户控制系统五部分;环境信息感知系统感知周围的环境信息与自身的姿态信息,并将GPS数据、陀螺仪数据、超声波数据等信息发送给船体控制系统的主控模块,将获取的摄像头图形数据推送到本地网络控制器的服务端口,本地服务通过端口映射到云端服务器端口以供人员设备进行访问;用户控制系统运行时自动绑定云服务器IP以及端口进行访问,获取船体摄像头数据,同时可下发控制指令;船体控制系统获取用户控制系统所下发的指令,同时结合环境信息感知系统获取的数据,进行智能路径规划,驱动船体朝着指定方向运行。
技术研发人员:夏志新,邵竞伟,杨小川,张春明,梁凯,陈聪,肖明,李纲,张文宇
受保护的技术使用者:秦皇岛港股份有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!