一种无人航行器的水面阻拦系统的制作方法
本发明属于无人航行器捕捉领域,尤其涉及一种无人航行器的水面阻拦系统。
背景技术:
1、水中无人航行器的捕捉是指通过特定的手段和设备将水中无人航行器从水中捕获或回收的过程。水中无人航行器通常是在水面上或水下执行任务,当需要进行捕捉或回收时,需要使用特定的方法和设备将其捕获。捕捉水中无人航行器的目的可以是为了维护设备的安全、收集数据、进行维修或更换设备等。
2、水面无人航行器在回收前仍需保持一定的航行速度以确保其航行姿态稳定,为实现顺利回收,需通过某些专用降速装置让其速度降为零后才能进行下一步回收工作,现有的阻拦方式多为鱼网阻拦或机械臂抓取,对行驶中的无人航信器的惯性作用冲击较大,易对无人航行器的外壳造成一定损害,同时对收放装置也容易造成损坏。
技术实现思路
1、本发明目的在于提供一种无人航行器的水面阻拦系统,以解决对水中无人航行器的捕捉前将其航行速度降为0的技术问题。
2、为实现上述目的,本发明的一种无人航行器的水面阻拦系统的具体技术方案如下:
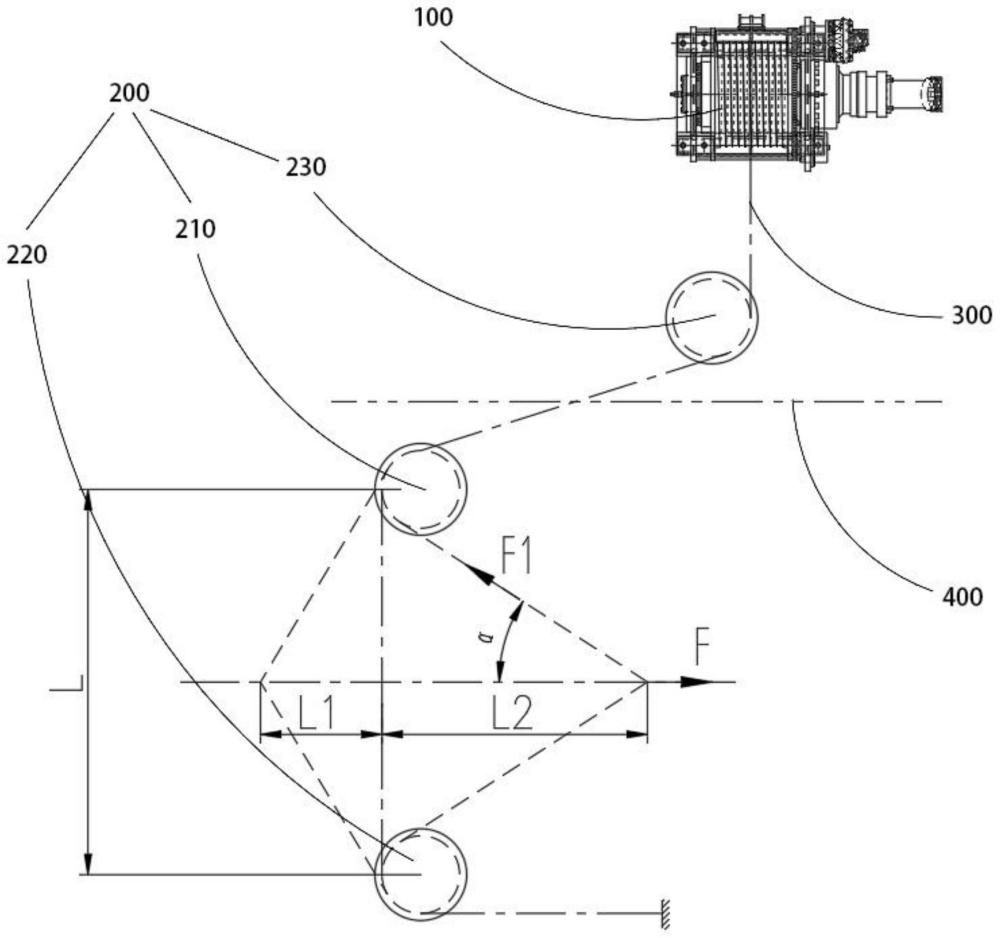
3、一种无人航行器的水面阻拦系统包括绞车装置,由母船伸出的桁架,由所述绞车装置向所述桁架伸出的阻拦绳索,以及供所述阻拦绳索穿过的若干转向结构;所述阻拦绳索由所述绞车装置伸出后穿过若干所述转向结构后固定在所述桁架上,无人航行器穿过所述桁架时被所述阻拦绳索阻拦后捕捉。
4、作为本发明的进一步改进,为了实现通过阻拦绳索对无人航行器阻拦时,能够应对无人航行器的惯性增加阻拦绳索的长度,避免阻拦绳索和无人航行器的损坏,所述转向结构包括设置在所述桁架上的第一转角滑车和第二转角滑车,所述第一转角滑车和所述第二转角滑车之间的所述阻拦绳索对无人航行器进行阻拦。
5、作为本发明的进一步改进,为了帮助阻拦绳索更顺畅的进入第一转角滑车,所述转向结构还包括设置在母船上的第三转角滑车,所述阻拦绳索从所述绞车装置穿出后穿过第三转角滑车来到所述桁架。
6、作为本发明的进一步改进,所述绞车装置包括液压马达,制动器,卷筒,控制阀组,绞车起升口和绞车下降口;所述阻拦绳索一端附着在所述卷筒上;所述制动器与所述液压马达连接,实现所述液压马达的制动;液压油进入所述绞车起升口经过所述控制阀组进入所述液压马达a口,驱动所述液压马达正转带动所述卷筒转动收紧所述阻拦绳索;液压油进入所述绞车下降口经过所述控制阀组进入所述液压马达b口,驱动所述液压马达反转带动所述卷筒转动放松所述阻拦绳索。
7、作为本发明的进一步改进,所述控制阀组包括梭阀,平衡阀,电磁阀和溢流阀;所述绞车起升口与所述梭阀和所述平衡阀的进油口连接,所述绞车下降口与所述梭阀的进油口和所述液压马达的b口连接,所述梭阀的出油口与所述制动器连接,所述平衡阀的出油口与所述电磁阀的进油口和所述液压马达的a口连接,所述电磁阀的出油口与所述溢流阀的进油口连接,所述电磁阀的进油口与所述液压马达的a口连接。
8、作为本发明的进一步改进,所述制动器为常闭式制动器,液压油进入所述制动器,所述制动器与所述液压马达脱离。
9、作为本发明的进一步改进,所述第一转角滑车和所述第二转角滑车的连线l与无人航行器阻拦方向垂直,无人航行器穿过所述桁架后将所述阻拦绳索拉扯,无人航行器与所述阻拦绳索形成夹角α,无人航行器的惯性力为f,无人航行器在所述阻拦绳索的阻拦下前进距离为l2,所述
10、作为本发明的进一步改进,为了方便桁架对阻拦位置的调整,同时方便阻拦后将无人航行器向母船靠近,所述桁架由母船向水面伸出,与母船可伸缩连接。
11、作为本发明的进一步改进,为了实现液压马达泄露的液压油回到油箱,所述绞车装置还包括一条连接所述液压马达和油箱的用于所述液压马达泄露的回油路。
12、有益效果:
13、通过绞车装置伸出阻拦绳索,在桁架伸出船舶舷外的位置对无人航行器进行阻拦,通过桁架之间的阻拦绳索进入无人航行器外表面的挂钩实现对无人航行器的阻拦减速,避免与无人航行器的硬接触,保护无人航行器。
14、相对于传统的回收方式,本发明的阻拦系统利用绞车装置的恒张力,在阻拦和回收过程中,对无人航行器和回收装置起到保护作用。
技术特征:
1.一种无人航行器的水面阻拦系统,其特征在于,包括绞车装置,由母船伸出的桁架,由所述绞车装置向所述桁架伸出的阻拦绳索,以及供所述阻拦绳索穿过的若干转向结构;
2.根据权利要求1所述的无人航行器的水面阻拦系统,其特征在于,所述转向结构包括设置在所述桁架上的第一转角滑车和第二转角滑车,所述第一转角滑车和所述第二转角滑车之间的所述阻拦绳索对无人航行器进行阻拦。
3.根据权利要求3所述的无人航行器的水面阻拦系统,其特征在于,所述转向结构还包括设置在母船上的第三转角滑车,所述阻拦绳索从所述绞车装置穿出后穿过第三转角滑车来到所述桁架。
4.根据权利要求1所述的无人航行器的水面阻拦系统,其特征在于,所述绞车装置包括液压马达,制动器,卷筒,控制阀组,绞车起升口和绞车下降口;
5.根据权利要求4所述的无人航行器的水面阻拦系统,其特征在于,所述控制阀组包括梭阀,平衡阀,电磁阀和溢流阀;
6.根据权利要求4所述的无人航行器的水面阻拦系统,其特征在于,所述制动器为常闭式制动器,液压油进入所述制动器,所述制动器与所述液压马达脱离。
7.根据权利要求2所述的无人航行器的水面阻拦系统,其特征在于,所述第一转角滑车和所述第二转角滑车的连线l与无人航行器阻拦方向垂直,无人航行器穿过所述桁架后将所述阻拦绳索拉扯,无人航行器与所述阻拦绳索形成夹角α,无人航行器的惯性力为f,无人航行器在所述阻拦绳索的阻拦下前进距离为l2,所述绞车装置的拉力
8.根据权利要求1所述的无人航行器的水面阻拦系统,其特征在于,所述桁架由母船向水面伸出,与母船可伸缩连接。
9.根据权利要求4所述的无人航行器的水面阻拦系统,其特征在于,所述绞车装置还包括一条连接所述液压马达和油箱的用于所述液压马达泄露的回油路。
技术总结
一种无人航行器的水面阻拦系统包括绞车装置,由母船伸出的桁架,由所述绞车装置向所述桁架伸出的阻拦绳索,以及供所述阻拦绳索穿过的若干转向结构;所述阻拦绳索由所述绞车装置伸出后穿过若干所述转向结构后固定在所述桁架上,无人航行器穿过所述桁架时被所述阻拦绳索阻拦后捕捉。本发明通过阻拦绳索与绞车装置的配合实现在水面对无人航行器的阻拦。
技术研发人员:印俊,赵明清,谢镇,高立全
受保护的技术使用者:中船绿洲镇江船舶辅机有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!