水下航行器约束拖曳装置
本发明属于试验测量,具体涉及一种水下航行器约束拖曳装置。
背景技术:
1、为了研究水下航行器在运动过程中体积效应以及螺旋桨旋转效应,一般采用支杆拖曳或自航模试验。支杆拖曳方式中支撑杆会伸出水面,对尾流产生扰动,而自航模试验中模型的运动速度、航向以及深度难以精准控制,影响尾迹的生成与发展。
技术实现思路
1、本发明的目的就是为了解决上述背景技术存在的不足,提供一种水下航行器约束拖曳装置,能够精准控制航行器在水下运动的深度、速度以及航向。
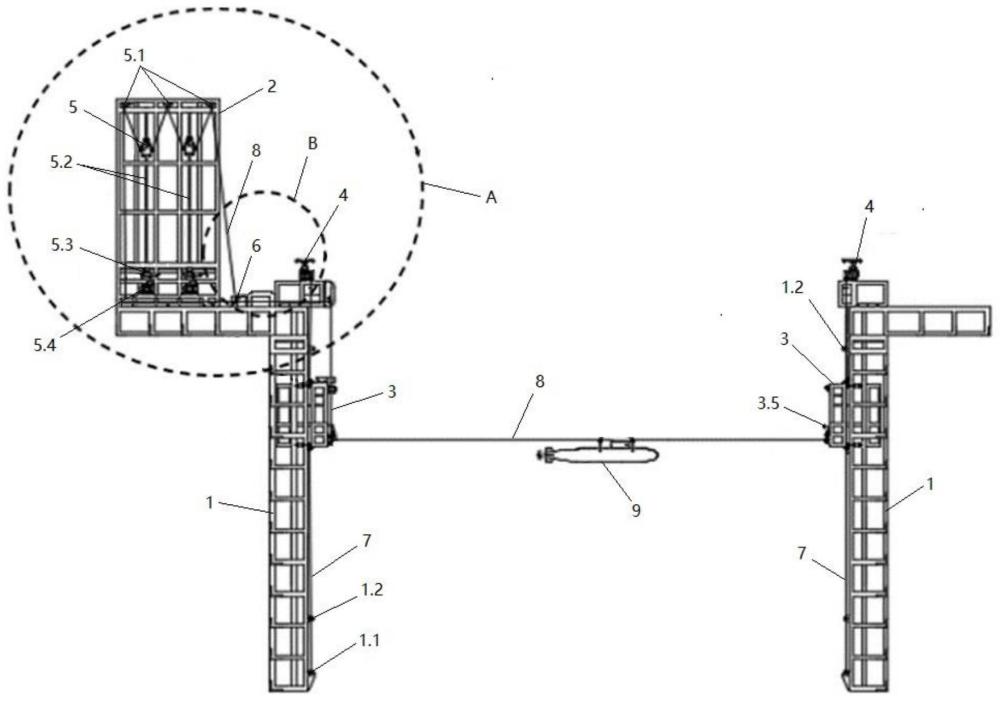
2、本发明采用的技术方案是:一种水下航行器约束拖曳装置,包括相对且间隔布置的两个固定架和用于拖曳航行器运行的拖曳钢丝绳,所述两个固定架相对的一侧分别布置垂向移动架,所述固定架上设有升降调节机构,其中一个固定架上设有张紧调节机构和水平拖曳机构,所述升降调节机构通过升降钢丝绳与垂向移动架连接,通过升降调节机构调节垂向移动架的高度,所述拖曳钢丝绳连接在张紧调节机构、水平拖曳机构和两个垂向移动架之间并形成闭环,通过张紧调节机构调节拖曳钢丝绳的张紧度,通过水平拖曳机构调节拖曳钢丝绳的运动速度和加速度。
3、进一步地,所述垂向移动架包括支架主体,所述支架主体靠近固定架的一侧设置多个垂向滚轮,支架主体另一侧有用于连接拖曳钢丝绳的拖曳滚轮,支架主体的顶部和底部设有用于连接升降钢丝绳的第一导向环。
4、进一步地,所述支架主体上设有水位传感器,通过水位传感器检测垂向移动架的高度。
5、进一步地,所述升降调节结构包括调节手柄、减速机、升降绞轮,所述升降钢丝绳端部缠绕在升降绞轮上,升降钢丝绳中部绕过垂向移动架上的第一导向环和固定架上的固定滚轮,通过移动调节手柄驱动减速机运动带动升降绞轮旋转,调节升降钢丝绳长度实现垂向移动架的高度调节。
6、进一步地,所述其中一个固定架上设有顶架,所述张紧调节机构安装于顶架上。
7、进一步地,所述张紧调节机构包括多个张紧滚轮、多个滚珠丝杠、张紧手轮和驱动机构,多个张紧滚轮间隔安装于顶架顶部,多个滚珠丝杠安装于顶架上且分别位于多个相邻的张紧滚轮之间,拖曳钢丝绳按张紧滚轮-滚珠丝杠-张紧滚轮的顺序依次绕过多个张紧滚轮和多个滚珠丝杠上的定向滚轮后与水平拖曳机构和垂向移动架连接,所述张紧手轮与驱动机构连接,驱动机构与滚珠丝杠连接,通过旋转张紧手轮带动驱动机构动作,调节滚珠丝杠上定向滚轮的高度实现拖曳钢丝绳的张紧度调节。
8、进一步地,所述滚珠丝杠顶端安装于顶架上、底端安装于驱动机构上,所述定向滚轮安装于滚珠丝杠的丝杠螺母上。
9、进一步地,所述固定架和顶架均为由型材组合焊接形成的桁架结构。
10、进一步地,所述水平拖曳机构包括电机和拖曳绞轮,拖曳钢丝绳端部缠绕在拖曳绞轮上,中部绕过张紧调节机构和两个垂向移动架形成所述闭环,通过电机驱动拖曳绞轮转动实现拖曳钢丝绳运动速度和加速度的调节。
11、更进一步地,所述固定架上位于垂向移动架的下方设有固定滚轮。
12、本发明的有益效果是:
13、本发明通过在水中或水域两侧布置的固定架作为支撑,并在固定架上设置升降调节机构、张紧调节机构及水平拖曳机构,以固定拖曳航行器并实现水下航行器在的深度、速度以及航向的精准控制,结构简单,实现方便。
14、本发明基于水下的拖曳方式能够有效避免水面拖曳支杆所带来的影响,更加真实的反映尾迹的特征状态;且能实时监测拖曳钢丝绳的直线度和相对水面的深度,并基于伺服电机完成拖曳钢丝匀速或变速运动,实现水下航行器在有限的距离内按照指定的工况精准运行。
技术特征:
1.一种水下航行器约束拖曳装置,其特征在于:包括相对且间隔布置的两个固定架(1)和用于拖曳航行器运行的拖曳钢丝绳(8),所述两个固定架(1)相对的一侧分别布置垂向移动架(3),所述固定架(1)上设有升降调节机构(4),其中一个固定架(1)上设有张紧调节机构(5)和水平拖曳机构(6),所述升降调节机构(4)通过升降钢丝绳(7)与垂向移动架(3)连接,通过升降调节机构(4)调节垂向移动架(3)的高度,所述拖曳钢丝绳(8)连接在张紧调节机构(5)、水平拖曳机构(6)和两个垂向移动架(3)之间并形成闭环,通过张紧调节机构(5)调节拖曳钢丝绳(8)的张紧度,通过水平拖曳机构(6)调节拖曳钢丝绳(8)的运动速度和加速度。
2.根据权利要求1所述的水下航行器约束拖曳装置,其特征在于:所述垂向移动架(3)包括支架主体(3.1),所述支架主体(3.1)靠近固定架(1)的一侧设置多个垂向滚轮(3.2),支架主体(3.1)另一侧有用于连接拖曳钢丝绳(8)的拖曳滚轮(3.4),支架主体(3.1)的顶部和底部设有用于连接升降钢丝绳(7)的第一导向环(3.3)。
3.根据权利要求2所述的水下航行器约束拖曳装置,其特征在于:所述支架主体(3.1)上设有水位传感器(3.5),通过水位传感器(3.5)检测垂向移动架(3)的高度。
4.根据权利要求1所述的水下航行器约束拖曳装置,其特征在于:所述升降调节结构(4)包括调节手柄(4.1)、减速机(4.2)、升降绞轮(4.3),所述升降钢丝绳(7)端部缠绕在升降绞轮(4.3)上,升降钢丝绳(7)中部绕过垂向移动架(3)上的第一导向环和固定架(1)上的固定滚轮,通过移动调节手柄(4.1)驱动减速机(4.2)运动带动升降绞轮(4.3)旋转,调节升降钢丝绳(7)长度实现垂向移动架(3)的高度调节。
5.根据权利要求1所述的水下航行器约束拖曳装置,其特征在于:所述其中一个固定架(1)上设有顶架(2),所述张紧调节机构(5)安装于顶架(2)上。
6.根据权利要求5所述的水下航行器约束拖曳装置,其特征在于:所述张紧调节机构(5)包括多个张紧滚轮(5.1)、多个滚珠丝杠(5.2)、张紧手轮(5.3)和驱动机构(5.4),多个张紧滚轮(5.1)间隔安装于顶架顶部,多个滚珠丝杠(5.2)安装于顶架上且分别位于多个相邻的张紧滚轮(5.1)之间,拖曳钢丝绳(8)按张紧滚轮(5.1)-滚珠丝杠(5.2)-张紧滚轮的顺序依次绕过多个张紧滚轮(5.1)和多个滚珠丝杠(5.2)上的定向滚轮后与水平拖曳机构(6)和垂向移动架(3)连接,所述张紧手轮(5.3)与驱动机构(5.4)连接,驱动机构(5.4)与滚珠丝杠(5.2)连接,通过旋转张紧手轮(5.3)带动驱动机构(5.4)动作,调节滚珠丝杠(5.2)上定向滚轮的高度实现拖曳钢丝绳的张紧度调节。
7.根据权利要求6所述的水下航行器约束拖曳装置,其特征在于:所述滚珠丝杠(5.2)顶端安装于顶架(2)上、底端安装于驱动机构(5.4)上,所述定向滚轮(5.5)安装于滚珠丝杠(5.2)的丝杠螺母上。
8.根据权利要求5所述的水下航行器约束拖曳装置,其特征在于:所述固定架(1)和顶架(2)均为由型材组合焊接形成的桁架结构。
9.根据权利要求1所述的水下航行器约束拖曳装置,其特征在于:所述水平拖曳机构(6)包括电机(6.1)和拖曳绞轮(6.2),拖曳钢丝绳(8)端部缠绕在拖曳绞轮(6.2)上,中部绕过张紧调节机构(5)和两个垂向移动架(3)形成所述闭环,通过电机(6.1)驱动拖曳绞轮(6.2)转动实现拖曳钢丝绳(8)运动速度和加速度的调节。
10.根据权利要求1所述的水下航行器约束拖曳装置,其特征在于:所述固定架(1)上位于垂向移动架(3)的下方设有固定滚轮(1.1)。
技术总结
本发明公开了一种水下航行器约束拖曳装置。它包括相对且间隔布置的两个固定架和用于拖曳航行器运行的拖曳钢丝绳,所述两个固定架相对的一侧分别布置垂向移动架,所述固定架上设有升降调节机构,其中一个固定架上设有张紧调节机构和水平拖曳机构,所述升降调节机构通过升降钢丝绳与垂向移动架连接,通过升降调节机构调节垂向移动架的高度,所述拖曳钢丝绳连接在张紧调节机构、水平拖曳机构和两个垂向移动架之间并形成闭环,通过张紧调节机构调节拖曳钢丝绳的张紧度,通过水平拖曳机构调节拖曳钢丝绳的运动速度和加速度。本发明能实现水下航行器在的深度、速度以及航向的精准控制,结构简单,实现方便。
技术研发人员:帅长庚,杜永成,骆飞洋,高程哲,盛玮
受保护的技术使用者:中国人民解放军海军工程大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!