一种水文监测用智能无人船的制作方法
本发明涉及无人船,具体为一种水文监测用智能无人船。
背景技术:
1、无人船是一种可以在水上无人驾驶,并通过远程控制模块进行操控船体在水中移动,而在水文监测作业中,为了对水资源进行较好的水文监测作业,通常会采用多种监测工具进行作业,但是水资源如河流等环境的面积较大,为此可以采用无人船搭载监测仪器在水面上进行较方便的监测作业;
2、智能无人船为了可以独立在水上移动行驶,通常内部会搭载有电池,且为了防止水浸入电池仓,会增加额外的密封盖板以及螺丝等安装对电池进行保护,而因为无人船上搭载的不同数量的监测仪器,长期的监测作业中,会需要对电池进行充电,以让无人船可以在较大面积的水面上行驶并进行监测作业,但是反复对电池拆装过程中,会需要重复拆卸密封盖板以及螺丝对盖板和船体的连接,步骤较多且较为耗时,进而降低了无人船拆装电池的效率。
技术实现思路
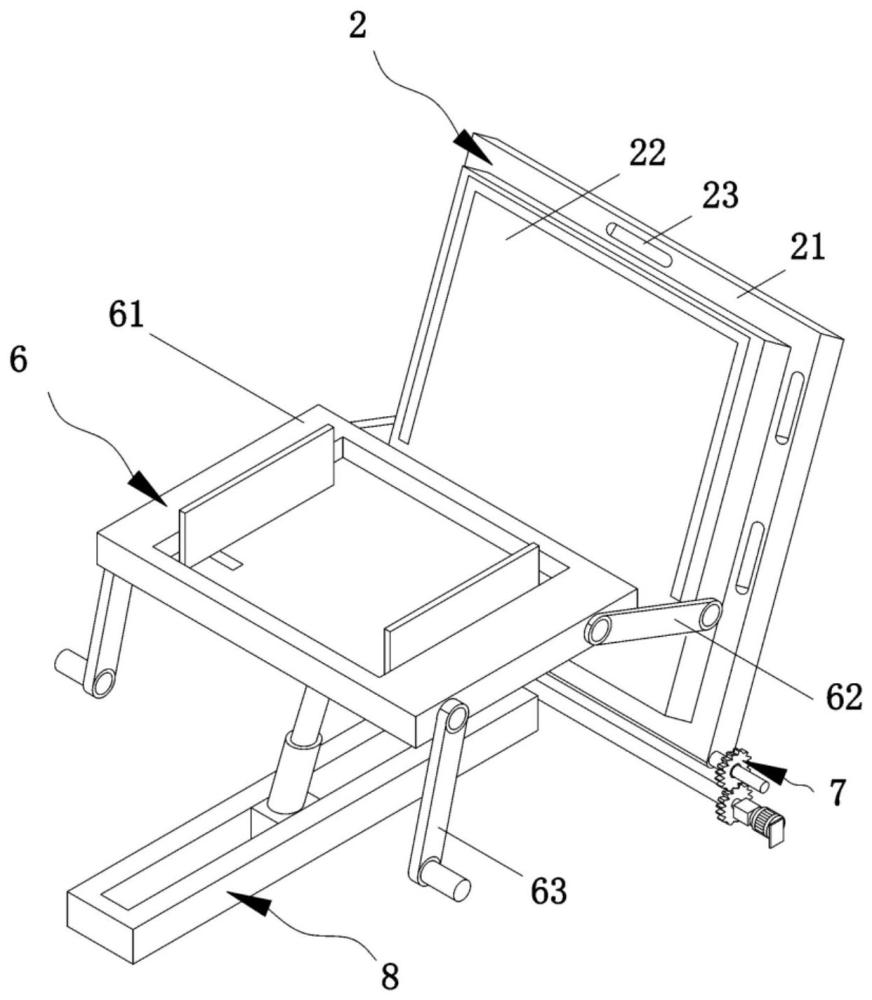
1、为实现上述目的,本发明提供如下技术方案:一种水文监测用智能无人船,包括无人船本体和控制单元,所述无人船本体顶部的前端设置有盖板机构,所述无人船本体顶部的前端开设有连接槽,所述连接槽的内腔固定连接有密封框,所述密封框的内腔设置有支撑机构,所述无人船本体的内腔设置有动力机构,所述密封框内腔的底部设置有限位机构,所述支撑机构包括支撑板,所述支撑板两侧的两端分别活动连接有第一拉板和第二拉板,所述支撑板内腔的四周均设置有夹持单元,所述支撑板的顶部开设有放置槽,且放置槽内腔的两侧均活动连接有夹板。
2、优选的,所述盖板机构包括盖板本体,所述盖板本体的底部固定连接有连接框,所述盖板本体底部的四周均开设有插槽,所述连接框内腔的底部活动连接有密封条,且密封条的下端贯穿至连接框的下方,所述盖板本体内腔的四周均设置有推动单元,所述密封框顶部的四周均固定连接有延伸块,所述延伸块的顶部贯穿插槽,且延伸至盖板本体的内腔。
3、优选的,所述推动单元包括安装块,所述安装块的顶部与盖板本体的内壁固定连接,所述安装块的底部通过转轴转轴活动连接有调节板,所述调节板位于插槽顶部一侧的两端均固定连接有延长板,所述调节板远离延长板一端的底部活动连接有推块,所述调节板的一侧开设有第一活动槽,所述第一活动槽的内壁开设有第二活动槽,所述推块的顶部固定连接有活动块,所述活动块的一端延伸至第一活动槽的内腔,所述活动块的两侧均固定连接有滑杆,且滑杆延伸至第二活动槽的内腔与第二活动槽的内腔活动连接,所述推块的底部与密封条固定连接。
4、优选的,所述夹持单元包括旋转块,两个所述旋转块的一端贯穿支撑板分别与第一拉板和第二拉板的一侧固定连接,所述旋转块的内腔螺纹连接有螺纹杆,所述螺纹杆的一端贯穿旋转块且活动连接有活动板,所述活动板的表面套设有套杆,所述活动板靠近套杆内壁的一侧固定连接有第一弹簧,所述第一弹簧的一端与套杆的内壁固定连接,所述套杆的一端贯穿支撑板,且与夹板的一侧固定连接。
5、优选的,所述活动板的底部固定连接有,所述支撑板内腔底部的四周均开设有滑槽,所述的下端延伸至滑槽的内腔,且与滑槽的内腔活动连接,所述第一拉板远离支撑板的一端与连接框的一侧通过阻尼转轴活动连接,所述第二拉板远离支撑板的一端与密封框内腔的一侧通过阻尼转轴活动连接。
6、优选的,所述动力机构包括第一旋转杆,所述第一旋转杆的数量为两个,两个所述第一旋转杆的一端均与无人船本体的内壁活动连接,所述第一旋转杆的另一端贯穿至连接槽的内腔且与盖板本体的一侧固定连接,所述第一旋转杆位于无人船本体内腔的表面固定连接有第一齿轮,所述无人船本体内腔一侧的下端活动连接有第二旋转杆,所述第一旋转杆内腔底部的另一侧固定连接有伺服电机,所述伺服电机的输出轴与第二旋转杆传动连接,所述第二旋转杆表面的两侧均固定连接有第二齿轮,所述第二齿轮与第一齿轮啮合。
7、优选的,所述限位机构包括导轨,所述导轨与密封框内腔的底部固定连接,所述导轨的内腔活动连接有导块,所述导块的顶部固定连接有倾斜杆,所述倾斜杆的顶部顶部活动连接有延伸杆,且延伸杆的上端与支撑板的底部固定连接,所述延伸杆的下端贯穿至倾斜杆的内腔,且固定连接有第二弹簧,所述第二弹簧的下端与倾斜杆的内壁固定连接。
8、优选的,所述控制单元包括遥控客户端、5g通信模块adcp模块、摄像头、rtk导航模块、水深测量模块、涵道式推进模块和中央处理器,所述无人船本体顶部的中部开设有安装槽,且安装槽的内腔固定连接有安装支架,所述adcp模块与无人船本体顶部的安装支架可拆卸连接,所述adcp模块的顶部通过螺栓螺纹连接有固定板,且固定板的顶部固定连接支撑杆,所述rtk导航模块与无人船本体顶部的支撑杆固定连接,所述涵道式推进模块与无人船本体底部的两侧活动连接,所述摄像头与无人船本体顶部的中心处固定连接。
9、优选的,所述rtk导航模块和adcp模块均与中央处理器双向电性连接,所述摄像头和水深测量模块的输入端均与中央处理器的输出端电性连接,所述遥控客户端与5g通信模块双向电性连接,所述5g通信模块与中央处理器双向电性连接,所述中央处理器的输出端与涵道式推进模块的输入端电性连接。
10、与现有技术相比,本发明的有益效果如下:
11、1、本发明通过无人船本体和控制单元为装置提供了基础的水文监测功能,adcp模块主要应用在河水中的流速流量测验工作,同时无人船本体配合涵道式推进模块可在水中进行较为稳定的移动,其中涵道式推进模块具有防水草、防缠绕垃圾、容易放置的优异性,rtk导航模块可对无人船本体的位移提供导航信息,配合5g通信模块和遥控客户端的控制来规划无人船本体的行经路线,达到对无人船本体进行方便控制的效果,并让无人船本体在水上进行较精细的移动。
12、2、本发明通过动力机构的设置,为盖板机构的翻转提供动力基础,以此打开盖板机构,同时配合第一拉板和第二拉板带动支撑板进行位移,让电池位移并升高高度,方便使用者从密封框内腔搬运出电池和放置完成充电的电池,在控制动力机构进行复位的过程中,支撑机构会配合限位机构同电池复位,同时盖板机构配合密封框对密封框内腔的空间进行密封,其中限位机构防止支撑机构晃动导致盖板机构与密封框的密封出现缝隙,且盖板机构的复位配合夹持单元可让夹板对电池进行固定夹持,增加电池的安装稳定性,过程中动力机构作为动力源配合、密封框、支撑机构和限位机构达到联动的效果,并以此减少工作人员拆装电池过程中的步骤,达到仅控制动力机构来方便对电池进行拆装更换的效果。
技术特征:
1.一种水文监测用智能无人船,包括无人船本体(1)和控制单元(3),其特征在于:所述无人船本体(1)顶部的前端设置有盖板机构(2),所述无人船本体(1)顶部的前端开设有连接槽(4),所述连接槽(4)的内腔固定连接有密封框(5),所述密封框(5)的内腔设置有支撑机构(6),所述无人船本体(1)的内腔设置有动力机构(7),所述密封框(5)内腔的底部设置有限位机构(8),所述支撑机构(6)包括支撑板(61),所述支撑板(61)两侧的两端分别活动连接有第一拉板(62)和第二拉板(63),所述支撑板(61)内腔的四周均设置有夹持单元(64),所述支撑板(61)的顶部开设有放置槽,且放置槽内腔的两侧均活动连接有夹板(65)。
2.根据权利要求1所述的一种水文监测用智能无人船,其特征在于:所述盖板机构(2)包括盖板本体(21),所述盖板本体(21)的底部固定连接有连接框(22),所述盖板本体(21)底部的四周均开设有插槽(23),所述连接框(22)内腔的底部活动连接有密封条(24),且密封条(24)的下端贯穿至连接框(22)的下方,所述盖板本体(21)内腔的四周均设置有推动单元(25),所述密封框(5)顶部的四周均固定连接有延伸块(26),所述延伸块(26)的顶部贯穿插槽(23),且延伸至盖板本体(21)的内腔。
3.根据权利要求2所述的一种水文监测用智能无人船,其特征在于:所述推动单元(25)包括安装块(251),所述安装块(251)的顶部与盖板本体(21)的内壁固定连接,所述安装块(251)的底部通过转轴转轴活动连接有调节板(252),所述调节板(252)位于插槽(23)顶部一侧的两端均固定连接有延长板(253),所述调节板(252)远离延长板(253)一端的底部活动连接有推块(254),所述调节板(252)的一侧开设有第一活动槽(256),所述第一活动槽(256)的内壁开设有第二活动槽(257),所述推块(254)的顶部固定连接有活动块(255),所述活动块(255)的一端延伸至第一活动槽(256)的内腔,所述活动块(255)的两侧均固定连接有滑杆,且滑杆延伸至第二活动槽(257)的内腔与第二活动槽(257)的内腔活动连接,所述推块(254)的底部与密封条(24)固定连接。
4.根据权利要求2所述的一种水文监测用智能无人船,其特征在于:所述夹持单元(64)包括旋转块(641),两个所述旋转块(641)的一端贯穿支撑板(61)分别与第一拉板(62)和第二拉板(63)的一侧固定连接,所述旋转块(641)的内腔螺纹连接有螺纹杆(642),所述螺纹杆(642)的一端贯穿旋转块(641)且活动连接有活动板(643),所述活动板(643)的表面套设有套杆(645),所述活动板(643)靠近套杆(645)内壁的一侧固定连接有第一弹簧(644),所述第一弹簧(644)的一端与套杆(645)的内壁固定连接,所述套杆(645)的一端贯穿支撑板(61),且与夹板(65)的一侧固定连接。
5.根据权利要求4所述的一种水文监测用智能无人船,其特征在于:所述活动板(643)的底部固定连接有(646),所述支撑板(61)内腔底部的四周均开设有滑槽,所述(646)的下端延伸至滑槽的内腔,且与滑槽的内腔活动连接,所述第一拉板(62)远离支撑板(61)的一端与连接框(22)的一侧通过阻尼转轴活动连接,所述第二拉板(63)远离支撑板(61)的一端与密封框(5)内腔的一侧通过阻尼转轴活动连接。
6.根据权利要求1所述的一种水文监测用智能无人船,其特征在于:所述动力机构(7)包括第一旋转杆(71),所述第一旋转杆(71)的数量为两个,两个所述第一旋转杆(71)的一端均与无人船本体(1)的内壁活动连接,所述第一旋转杆(71)的另一端贯穿至连接槽(4)的内腔且与盖板本体(21)的一侧固定连接,所述第一旋转杆(71)位于无人船本体(1)内腔的表面固定连接有第一齿轮(72),所述无人船本体(1)内腔一侧的下端活动连接有第二旋转杆(73),所述第一旋转杆(71)内腔底部的另一侧固定连接有伺服电机(75),所述伺服电机(75)的输出轴与第二旋转杆(73)传动连接,所述第二旋转杆(73)表面的两侧均固定连接有第二齿轮(74),所述第二齿轮(74)与第一齿轮(72)啮合。
7.根据权利要求1所述的一种水文监测用智能无人船,其特征在于:所述限位机构(8)包括导轨(81),所述导轨(81)与密封框(5)内腔的底部固定连接,所述导轨(81)的内腔活动连接有导块(82),所述导块(82)的顶部固定连接有倾斜杆(83),所述倾斜杆(83)的顶部顶部活动连接有延伸杆(84),且延伸杆(84)的上端与支撑板(61)的底部固定连接,所述延伸杆(84)的下端贯穿至倾斜杆(83)的内腔,且固定连接有第二弹簧(85),所述第二弹簧(85)的下端与倾斜杆(83)的内壁固定连接。
8.根据权利要求1所述的一种水文监测用智能无人船,其特征在于:所述控制单元(3)包括遥控客户端(31)、5g通信模块(32)adcp模块(33)、摄像头(34)、rtk导航模块(35)、水深测量模块(36)、涵道式推进模块(37)和中央处理器(38),所述无人船本体(1)顶部的中部开设有安装槽,且安装槽的内腔固定连接有安装支架,所述adcp模块(33)与无人船本体(1)顶部的安装支架可拆卸连接,所述adcp模块(33)的顶部通过螺栓螺纹连接有固定板,且固定板的顶部固定连接支撑杆,所述rtk导航模块(35)与无人船本体(1)顶部的支撑杆固定连接,所述涵道式推进模块(37)与无人船本体(1)底部的两侧活动连接,所述摄像头(34)与无人船本体(1)顶部的中心处固定连接。
9.根据权利要求8所述的一种水文监测用智能无人船,其特征在于:所述rtk导航模块(35)和adcp模块(33)均与中央处理器(38)双向电性连接,所述摄像头(34)和水深测量模块(36)的输入端均与中央处理器(38)的输出端电性连接,所述遥控客户端(31)与5g通信模块(32)双向电性连接,所述5g通信模块(32)与中央处理器(38)双向电性连接,所述中央处理器(38)的输出端与涵道式推进模块(37)的输入端电性连接。
技术总结
本发明公开了一种水文监测用智能无人船,涉及无人船技术领域,包括无人船本体和控制单元,所述无人船本体顶部的前端设置有盖板机构,所述无人船本体顶部的前端开设有连接槽。本发明通过动力机构的设置,为盖板机构的翻转提供动力基础,以此打开盖板机构,同时配合第一拉板和第二拉板带动支撑板进行位移,让电池位移并升高高度,方便使用者从密封框内腔搬运出电池和放置完成充电的电池,在控制动力机构进行复位的过程中,支撑机构会配合限位机构同电池复位,同时盖板机构配合密封框对密封框内腔的空间进行密封,其中限位机构防止支撑机构晃动导致盖板机构与密封框的密封出现缝隙,且盖板机构的复位配合夹持单元可让夹板对电池进行固定夹持。
技术研发人员:程启亮,王婷婷,栗泽超
受保护的技术使用者:程启亮
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!