一种水上垃圾收集救援一体化机器人
本发明涉及水上救援和垃圾清洁,尤其是涉及一种水上垃圾收集救援一体化机器人。
背景技术:
1、当人们在海边和湖泊游玩时,常常发生溺水事故,同时偶有发生的海上灾难也会导致船上人员溺水。一般的救援,需要救援人员及时发现溺水者的位置,且向溺水者的位置精准抛出救生圈实施救援,这样的救助方法不及时且低效,时常导致溺水者可能在短时间内得不到有效救助而身亡。同时,还有许多的救援者下水救援,因为没有正确的救援方式或者恶劣环境的影响,不但没有完成救援,还使自身溺亡丧生。
2、此外,随着沿海地区经济的快速增长,与之对应的海洋环境污染问题也日益严重,治理海洋生态问题迫在眉睫,传统人工打捞垃圾的方式难以在短时间内将大片海域的海洋垃圾清理干净,且耗费时间长,花费成本高昂。
技术实现思路
1、本发明的目的在于提供水上垃圾收集救援一体化机器人,该机器实用性强、适用范围广、运行效果好、智能化程度高,能有效解决水上垃圾污染和落水救援两大难题。
2、本发明解决上述问题的技术方案为:
3、一种水上垃圾收集救援一体化机器人,包括外壳内充式气囊、动力装置、充气式救生圈以及垃圾收集装置;
4、所述外壳内充式气囊的中心连接有所述垃圾收集装置,处于工作状态时,所述外壳内充式气囊通过所述动力装置驱动、自主识别,在海上或湖面收集垃圾;
5、所述充气式救生圈通过铰链连接于所述外壳内充式气囊的外表面;所述充气式救生圈未工作时使用魔术贴粘贴于所述外壳内充式气囊下表面;所述充气式救生圈工作时,由所述外壳内充式气囊对其充气,使之上浮实现救生圈的功能。
6、优选的,所述动力装置包括可旋转球体和转向舵机;所述可旋转球体内部安装有双吸泵,所述可旋转球体尾部设有双层滑槽,所述双层滑槽与销轴有槽口配合;所述销轴与曲柄过盈配合,所述曲柄由所述转向舵机驱动旋转;所述转向舵机安装在所述外壳内充式气囊的内壳上表面。
7、优选的,所述外壳内充式气囊外表面设有四个半圆形凹槽,用于连接四个所述可旋转球体;所述外壳内充式气囊外表面装有一组照明灯和四个球体保护外壳,所述可旋转球体与所述球体保护外壳的上下内表面通过固定轴连接。
8、优选的,所述球体保护外壳表面封装一层微型过滤器,用于防止微小垃圾进入所述双吸泵。
9、优选的,所述球体保护外壳外表面装有若干个太阳能发电板、若干个声音传感器以及若干个鱼眼摄像头。
10、优选的,四个所述球体保护外壳之间连有两个把手。
11、优选的,所述垃圾收集装置包括外桶、内桶、附带可吸纳软管的桶盖、水泵和保护壳;所述内桶安装在所述外桶的中心处,所述外桶与所述桶盖螺旋连接,所述外桶底部安装有水泵,所述水泵安装在所述保护壳内部,所述保护壳底面设有通孔,用于所述水泵的出水,所述保护壳安装在所述外桶的底面,且与所述外桶和所述内桶是连通的。
12、优选的,所述外桶的外壁均匀设有四个电磁铁;处于工作状态时,所述外壳内充式气囊与所述垃圾收集装置通过所述电磁铁连接;处于非工作状态时,所述垃圾收集装置可拆卸下来清理垃圾。
13、优选的,所述内桶底部镂空且装有过滤网。
14、优选的,所述充气式救生圈呈u型。
15、与现有技术相比,本发明的有益效果在于:该水上垃圾收集救援一体化机器人基于视觉自主控制地进行海上或河湖垃圾收集或搜救,且该机器人配备有遥控控制功能,当有外部指令即遥控器控制时,它会优先服从于遥控控制,去到落水者旁边,将落水者救起,达到垃圾收集救援一体化。
技术特征:
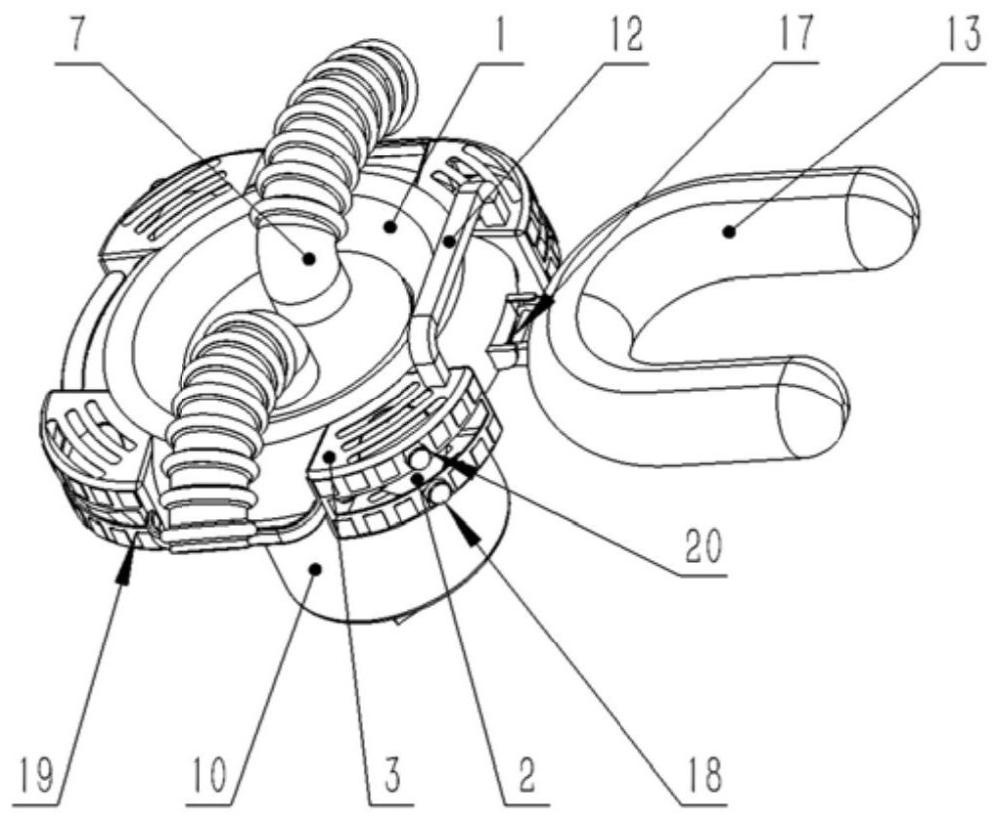
1.一种水上垃圾收集救援一体化机器人,其特征在于,包括外壳内充式气囊(1)、动力装置、充气式救生圈(13)以及垃圾收集装置;
2.根据权利要求1所述的水上垃圾收集救援一体化机器人,其特征在于,所述动力装置包括可旋转球体(2)和转向舵机(6);所述可旋转球体(2)内部安装有双吸泵(22),所述可旋转球体(2)尾部设有双层滑槽(21),所述双层滑槽(21)与销轴有槽口配合;所述销轴与曲柄(5)过盈配合,所述曲柄(5)由所述转向舵机(6)驱动旋转;所述转向舵机(6)安装在所述外壳内充式气囊(1)的内壳上表面。
3.根据权利要求2所述的水上垃圾收集救援一体化机器人,其特征在于,所述外壳内充式气囊(1)外表面设有四个半圆形凹槽,用于连接四个所述可旋转球体(2);所述外壳内充式气囊(1)外表面装有一组照明灯(12)和四个球体保护外壳(3),所述可旋转球体(2)与所述球体保护外壳(3)的上下内表面通过固定轴(4)连接。
4.根据权利要求2所述的水上垃圾收集救援一体化机器人,其特征在于,所述球体保护外壳(3)表面封装一层微型过滤器,用于防止微小垃圾进入所述双吸泵(22)。
5.根据权利要求4所述的水上垃圾收集救援一体化机器人,其特征在于,所述球体保护外壳(3)外表面装有若干个太阳能发电板(19)、若干个声音传感器(20)以及若干个鱼眼摄像头(18)。
6.根据权利要求4所述的水上垃圾收集救援一体化机器人,其特征在于,四个所述球体保护外壳(3)之间连有两个把手。
7.根据权利要求1所述的水上垃圾收集救援一体化机器人,其特征在于,所述垃圾收集装置包括外桶(10)、内桶(9)、附带可吸纳软管(7)的桶盖(8)、水泵(15)和保护壳(16);所述内桶(9)安装在所述外桶(10)的中心处,所述外桶(10)与所述桶盖(8)螺旋连接,所述外桶(10)底部安装有水泵(15),所述水泵(15)安装在所述保护壳(16)内部,所述保护壳(16)底面设有通孔,用于所述水泵(15)的出水,所述保护壳(16)安装在所述外桶(10)的底面,且与所述外桶(10)和所述内桶(9)是连通的。
8.根据权利要求7所述的水上垃圾收集救援一体化机器人,其特征在于,所述外桶(10)的外壁均匀设有四个电磁铁(11);处于工作状态时,所述外壳内充式气囊(1)与所述垃圾收集装置通过所述电磁铁(11)连接;处于非工作状态时,所述垃圾收集装置可拆卸下来清理垃圾。
9.根据权利要求7所述的水上垃圾收集救援一体化机器人,其特征在于,所述内桶(9)底部镂空且装有过滤网(14)。
10.根据权利要求1所述的水上垃圾收集救援一体化机器人,其特征在于,所述充气式救生圈(13)呈u型。
技术总结
本发明提供了一种水上垃圾收集救援一体化机器人,包括外壳内充式气囊、动力装置、充气式救生圈以及垃圾收集装置;所述外壳内充式气囊的中心连接有所述垃圾收集装置,处于工作状态时,所述外壳内充式气囊通过所述动力装置驱动、自主识别,在海上或湖面收集垃圾;所述充气式救生圈通过铰链连接于所述外壳内充式气囊的外表面;所述充气式救生圈未工作时使用魔术贴粘贴于所述外壳内充式气囊下表面;所述充气式救生圈工作时,由所述外壳内充式气囊对其充气,使之上浮实现救生圈的功能。本发明实用性强、适用范围广、运行效果好、智能化程度高,能有效解决水上垃圾污染和落水救援两大难题,具备良好的研究前景。
技术研发人员:江帆,李明柱,刘梓新,吴青凤,李毅,林培哲,朱浩彬,杨筑成
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!