一种水下清刷机器人
本发明涉及水下机器人,尤其涉及一种水下清刷机器人。
背景技术:
1、水下机器人技术在近年来得到了迅速的发展,尤其是在船舶维护、检测以及清洁方面。由于海洋环境的复杂性和船舶表面经常受到的海洋生物、藻类、沉积物等的污染,船舶的表面很容易形成污损,会增加船舶的航行阻力,导致巨大的经济损失。传统的水下船体清洗方法主要依赖人工,工作效率低,还存在很大的安全隐患。因此水下机器人逐渐被进行水下清洗。
2、传统水下机器人通常配备有高清摄像头、声呐和其他传感器,或安装刷盘、喷枪等装置,可以远程操作并通过电缆与地面控制台连接。但这些机器人通常设计复杂,功能单一,尤其是复杂的使用需求同时需要多台机器人进行清刷和辅助观测时,不同型号的机器人难以互相适配、统一作业。
3、因此,如何开发一种易于模块化更换的水下清刷机器人系统,使同型号机器人能够满足多种任务需求,或在同一场景中互相协同,成为该领域的研究热点。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种水下清刷机器人,旨在通过框架设计与模块插槽实现快速地根据实际应用需求进行替换,进一步提高工作效率和适应性。其包含了机器人本体的模块化推进器,外置清刷模块,外置观测模块。
2、为实现上述目的,本发明提供了如下技术方案:
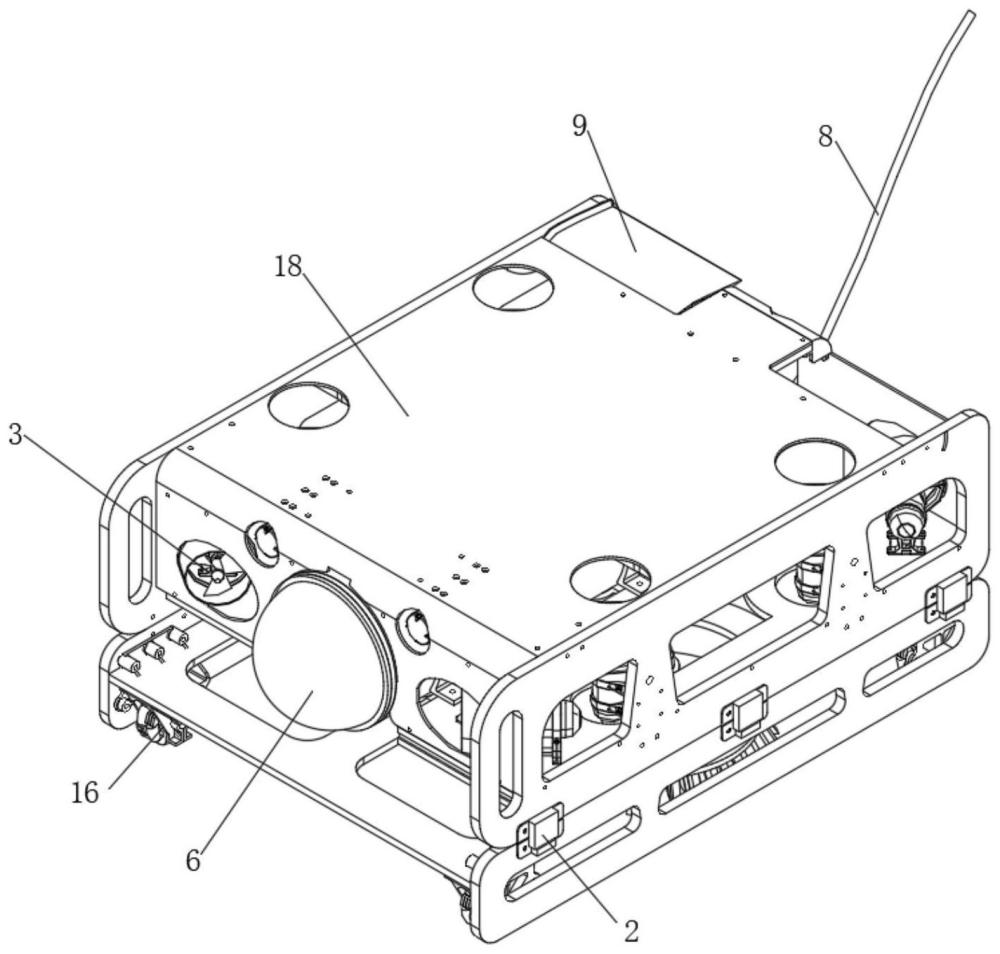
3、一种水下清刷机器人,包括聚丙烯框架,所述聚丙烯框架的底端左右两侧均固定连接有多个模块插槽,所述聚丙烯框架的内部四角均安装有螺旋桨推进器,所述聚丙烯框架的内部固定连接有控制舱,所述控制舱的内部固定连接有多个接插件,所述控制舱的前侧安装有航行摄像头,所述聚丙烯框架的前侧顶端左右两侧均安装有照明灯,所述控制舱的后侧中部固定连接有脐带缆,所述聚丙烯框架的顶端后侧左右两端均安装有安定翼面,所述聚丙烯框架的底端设置有辅助机构,所述聚丙烯框架的顶端固定连接有顶盖。
4、进一步地,所述辅助机构包括清洁组件,所述清洁组件包括清刷模块框架,所述清刷模块框架的内部安装有多个刷盘电机,所述刷盘电机的输出端固定连接有尼龙刷盘,所述清刷模块框架的顶端右侧安装有清刷摄像,所述清刷模块框架的底端四角均固定连接有全向轮,清刷模块框架与所述聚丙烯框架之间为可拆卸连接。
5、进一步地,所述辅助机构包括观测组件,所述观测组件包括观测模块框架,所述观测模块框架的内部前侧安装有声呐,所述观测模块框架的内部四周均安装有观测摄像头,观测模块框架与所述聚丙烯框架之间为可拆卸连接。
6、进一步地,其中一个所述接插件与所述声呐之间为可拆卸连接,其中另四个所述接插件与所述观测摄像头之间为可拆卸连接。
7、进一步地,所述安定翼面的顶端与所述顶盖的底端相接触。
8、进一步地,所述模块插槽的底端固定连接在所述观测模块框架的顶端外壁。
9、本发明具有如下有益效果:
10、1、本发明中,通过聚丙烯框架、脐带缆、安定翼面、观测模块框架等结构的相互配合下,实现了实现水下清刷船体、海洋平台等结构物表面功能,或对被清刷目标进行整体辅助观测功能。
技术特征:
1.一种水下清刷机器人,包括聚丙烯框架(1),其特征在于:所述聚丙烯框架(1)的底端左右两侧均固定连接有多个模块插槽(2),所述聚丙烯框架(1)的内部四角均安装有螺旋桨推进器(3),所述聚丙烯框架(1)的内部固定连接有控制舱(4),所述控制舱(4)的内部固定连接有多个接插件(5),所述控制舱(4)的前侧安装有航行摄像头(6),所述聚丙烯框架(1)的前侧顶端左右两侧均安装有照明灯(7),所述控制舱(4)的后侧中部固定连接有脐带缆(8),所述聚丙烯框架(1)的顶端后侧左右两端均安装有安定翼面(9),所述聚丙烯框架(1)的底端设置有辅助机构,所述聚丙烯框架(1)的顶端固定连接有顶盖(18)。
2.根据权利要求1所述的一种水下清刷机器人,其特征在于:所述辅助机构包括清洁组件,所述清洁组件包括清刷模块框架(13),所述清刷模块框架(13)的内部安装有多个刷盘电机(15),所述刷盘电机(15)的输出端固定连接有尼龙刷盘(14),所述清刷模块框架(13)的顶端右侧安装有清刷摄像(17),所述清刷模块框架(13)的底端四角均固定连接有全向轮(16),清刷模块框架(13)与所述聚丙烯框架(1)之间为可拆卸连接。
3.根据权利要求1所述的一种水下清刷机器人,其特征在于:所述辅助机构包括观测组件,所述观测组件包括观测模块框架(10),所述观测模块框架(10)的内部前侧安装有声呐(11),所述观测模块框架(10)的内部四周均安装有观测摄像头(12),观测模块框架(10)与所述聚丙烯框架(1)之间为可拆卸连接。
4.根据权利要求1所述的一种水下清刷机器人,其特征在于:其中一个所述接插件(5)与所述声呐(11)之间为可拆卸连接,其中另四个所述接插件(5)与所述观测摄像头(12)之间为可拆卸连接。
5.根据权利要求1所述的一种水下清刷机器人,其特征在于:所述安定翼面(9)的顶端与所述顶盖(18)的底端相接触。
6.根据权利要求1所述的一种水下清刷机器人,其特征在于:所述模块插槽(2)的底端固定连接在所述观测模块框架(10)的顶端外壁。
技术总结
本发明涉及水下机器人技术领域,公开了一种水下清刷机器人,包括聚丙烯框架,所述聚丙烯框架的底端左右两侧均固定连接有多个模块插槽,所述聚丙烯框架的内部四角均安装有螺旋桨推进器,所述聚丙烯框架的内部固定连接有控制舱,所述控制舱的内部固定连接有多个接插件,所述控制舱的前侧安装有航行摄像头,所述聚丙烯框架的前侧顶端左右两侧均安装有照明灯,所述控制舱的后侧中部固定连接有脐带缆,所述聚丙烯框架的顶端后侧左右两端均安装有安定翼面,所述聚丙烯框架的底端设置有辅助机构,所述聚丙烯框架的顶端固定连接有顶盖。本发明中,实现了实现水下清刷船体、海洋平台等结构物表面功能,或对被清刷目标进行整体辅助观测功能。
技术研发人员:李晗生,韩凤磊,张嘉伟,赵望源,李锦添,常青,朱文松,李于来,陈俊陶
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!