一种漂浮式风机及其稳定性控制方法与流程
本发明涉及海上风力发电,更具体地说,涉及一种漂浮式风机及其稳定性控制方法。
背景技术:
1、不同于传统的固定式海上风力发电机,漂浮式风力发电机将固定式基础改为漂浮式基础,使风机“漂”在水面上,漂浮式风机整体的稳定性更容易受到风浪流等环境因素的影响,其结构姿态稳定性是漂浮式风机设计中重点关注的问题,漂浮式风机的稳定性不仅关系到漂浮式风机的发电量,还会影响漂浮式风机的安全性。
2、目前针对漂浮式风机稳定性的方法主要有两种,一种方法是比较常见的提升漂浮式风机的浮体稳定性,其通过降低浮体的重心、增加浮体的干舷、增加浮体的宽度等方式来提升浮体稳定性,但这些方法都会导致浮体大型化,进而增加成本;另一种方法是变桨控制策略,这种方法虽然投入成本较低,但是会导致发电量损失,并且在极限工况下作用较小。
3、因此,如何在提升漂浮式风机稳定性的同时增加发电量,降低成本是本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,为解决上述问题,本发明提供一种漂浮式风机及其稳定性控制方法,技术方案如下:
2、一种漂浮式风机的稳定性控制方法,所述漂浮式风机包括:浮体、塔架、机舱、叶轮、第一传感器和多个锚链张紧力调节组件;
3、所述机舱分别与所述叶轮和所述塔架连接,所述塔架和所述浮体连接,所述机舱包括控制器和多个第二传感器,所述塔架包括阻尼器;
4、所述浮体包括底座和位于所述底座一侧的多个立柱,所述立柱包括压载水调节组件,所述立柱上设置有第一传感器,多个所述锚链张紧力调节组件分别与多个所述立柱一一对应连接;
5、所述稳定性控制方法应用于所述控制器,所述稳定性控制方法包括:
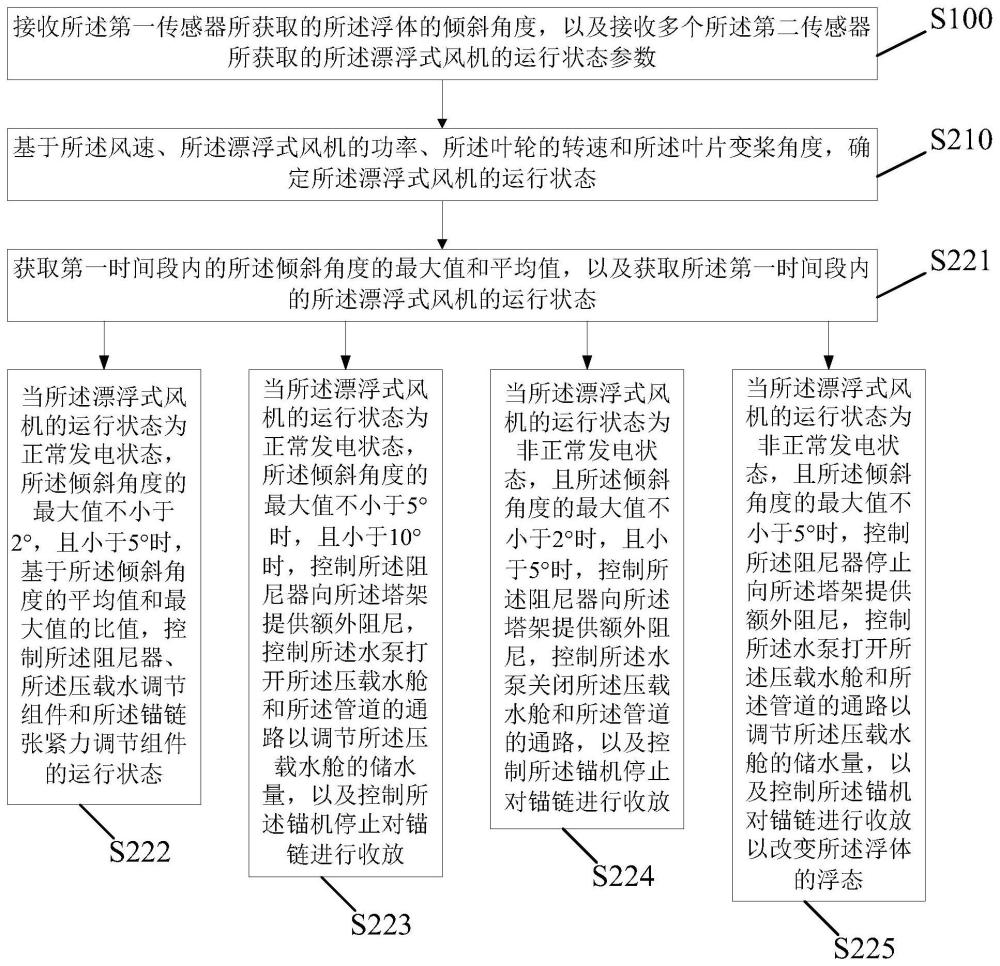
6、接收所述第一传感器所获取的所述浮体的倾斜角度,以及接收多个所述第二传感器所获取的所述漂浮式风机的运行状态参数;
7、基于所述运行状态参数和所述倾斜角度,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态,以控制所述漂浮式风机的倾斜角度。
8、优选的,在上述漂浮式风机的稳定性控制方法中,所述运行状态参数包括风速、所述漂浮式风机的功率、所述叶轮的转速和叶片变桨角度;
9、在接收到所述运行状态参数后,且在控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态之前,所述稳定性控制方法包括:
10、基于所述风速、所述漂浮式风机的功率、所述叶轮的转速和所述叶片变桨角度,确定所述漂浮式风机的运行状态;
11、基于所述漂浮式风机的运行状态和所述倾斜角度,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态。
12、优选的,在上述漂浮式风机的稳定性控制方法中,所述基于所述漂浮式风机的运行状态和所述倾斜角度,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态,包括:
13、获取第一时间段内的所述倾斜角度的最大值和平均值,以及获取所述第一时间段内的所述漂浮式风机的运行状态;
14、当所述漂浮式风机的运行状态为正常发电状态,所述倾斜角度的最大值不小于2°,且小于5°时,基于所述倾斜角度的平均值和最大值的比值,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态。
15、优选的,在上述漂浮式风机的稳定性控制方法中,所述压载水调节组件包括压载水舱、水泵和管道,多个所述立柱中的压载水舱通过所述管道连接,所述管道上设置有所述水泵;
16、所述锚链张紧力调节组件包括:锚机和锚链;多个所述锚机与多个所述立柱一一对应连接,所述锚链的第一端与所述锚机连接,所述锚链的第二端与固定装置连接;
17、所述基于所述倾斜角度的平均值和最大值的比值,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态,包括:
18、当所述倾斜角度的平均值和最大值的比值小于0.2时,控制所述阻尼器向所述塔架提供额外阻尼,控制所述水泵关闭所述压载水舱和所述管道的通路,以及控制所述锚机停止对锚链进行收放;
19、当所述倾斜角度的平均值和最大值的比值不小于0.2,且小于0.8时,控制所述阻尼器向所述塔架提供额外阻尼,控制所述水泵打开所述压载水舱和所述管道的通路以调节所述压载水舱的储水量,以及控制所述锚机停止对锚链进行收放;
20、当所述倾斜角度的平均值和最大值的比值不小于0.8时,控制所述阻尼器停止向所述塔架提供额外阻尼,控制所述水泵打开所述压载水舱和所述管道的通路以调节所述压载水舱的储水量,以及控制所述锚机停止对锚链进行收放。
21、优选的,在上述漂浮式风机的稳定性控制方法中,在所述获取第一时间段内的所述倾斜角度的最大值和平均值,以及获取所述第一时间段的所述漂浮式风机的运行状态后,所述稳定性控制方法还包括:
22、当所述漂浮式风机的运行状态为正常发电状态,所述倾斜角度的最大值不小于5°,且小于10°时,控制所述阻尼器向所述塔架提供额外阻尼,控制所述水泵打开所述压载水舱和所述管道的通路以调节所述压载水舱的储水量,以及控制所述锚机停止对锚链进行收放;
23、当所述漂浮式风机的运行状态为非正常发电状态,且所述倾斜角度的最大值不小于2°,且小于5°时,控制所述阻尼器向所述塔架提供额外阻尼,控制所述水泵关闭所述压载水舱和所述管道的通路,以及控制所述锚机停止对锚链进行收放;
24、当所述漂浮式风机的运行状态为非正常发电状态,且所述倾斜角度的最大值不小于5°时,控制所述阻尼器停止向所述塔架提供额外阻尼,控制所述水泵打开所述压载水舱和所述管道的通路以调节所述压载水舱的储水量,以及控制所述锚机对锚链进行收放以改变所述浮体的浮态。
25、本技术还提供了一种漂浮式风机,所述漂浮式风机包括:
26、浮体、塔架、机舱、叶轮、第一传感器和多个锚链张紧力调节组件;
27、所述浮体包括底座和位于所述底座一侧的多个立柱,所述立柱包括压载水调节组件,所述立柱上设置有第一传感器,多个所述锚链张紧力调节组件分别与多个所述立柱一一对应连接,所述第一传感器用于获取所述浮体的倾斜角度;
28、所述机舱分别与所述叶轮和所述塔架连接,所述塔架和所述浮体连接,所述机舱包括控制器和多个第二传感器,所述塔架包括阻尼器,多个所述第二传感器用于获取所述漂浮式风机的运行状态参数,所述控制器用于基于所述运行状态参数和所述倾斜角度,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态,以控制所述漂浮式风机的倾斜角度。
29、优选的,在上述漂浮式风机中,所述阻尼器为调谐质量阻尼器。
30、优选的,在上述漂浮式风机中,所述压载水调节组件包括压载水舱、水泵和管道;
31、多个所述立柱中的压载水舱通过所述管道连接,所述管道上设置有所述水泵,所述水泵用于控制所述压载水舱和所述管道的通路,以调节所述压载水舱的储水量。
32、优选的,在上述漂浮式风机中,相邻两个所述立柱通过连接杆连接,所述连接杆平行于所述底座所在平面,所述管道位于所述连接杆的内部,所述管道用于通过所述连接杆将多个所述立柱中的压载水舱连通。
33、优选的,在上述漂浮式风机中,所述锚链张紧力调节组件包括:锚机和锚链;
34、多个所述锚机与多个所述立柱一一对应连接,所述锚链的第一端与所述锚机连接,所述锚链的第二端与固定装置连接,所述锚机用于控制所述锚链的收放以改变所述浮体的浮态。
35、相较于现有技术,本发明实现的有益效果为:
36、本发明提供了一种漂浮式风机及其稳定性控制方法,所述漂浮式风机包括:浮体、塔架、机舱、叶轮、第一传感器和多个锚链张紧力调节组件;所述机舱分别与所述叶轮和所述塔架连接,所述塔架和所述浮体连接,所述机舱包括控制器和多个第二传感器,所述塔架包括阻尼器;所述浮体包括底座和位于所述底座一侧的多个立柱,所述立柱包括压载水调节组件,所述立柱上设置有第一传感器,多个所述锚链张紧力调节组件分别与多个所述立柱一一对应连接;所述稳定性控制方法应用于所述控制器,所述稳定性控制方法包括:接收所述第一传感器所获取的所述浮体的倾斜角度,以及接收多个所述第二传感器所获取的所述漂浮式风机的运行状态参数;基于所述运行状态参数和所述倾斜角度,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态,以控制所述漂浮式风机的倾斜角度。
37、本发明通过利用第一传感器获取所述浮体的倾斜角度,利用第二传感器获取所述漂浮式风机的运行状态参数,分别将所述倾斜角度和所述运行状态参数传输到控制器中,所述控制器基于所述运行状态参数和所述倾斜角度,向所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件输出控制信号,控制所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的运行状态,以实现所述阻尼器、所述压载水调节组件和所述锚链张紧力调节组件的协同工作,从而降低漂浮式风机的倾斜角度,极大提升漂浮式风机的稳定性,增加发电量,并且这种漂浮式风机的浮体结构还可以进行优化减重,避免浮体大型化,从而降低成本。
- 还没有人留言评论。精彩留言会获得点赞!