一种船舶无绳智能浮式系泊设备及泊船方法与流程
本发明涉及自动泊船,具体为一种船舶无绳智能浮式系泊设备及泊船方法。
背景技术:
1、浮式系船柱是确保船舶在闸室充泄水过程中,起着保护船舶自身安全,是一个随着水位变化能与船舶同步变化的装置,浮式系船柱可以满足不同吨位、空载或满载的船舶系泊要求,减少船舶过闸时由于闸室水位变化引起的解系缆次数,减少人工参与,提高过闸安全性,为保证在闸室内各船舶都能很好的系缆,闸室每隔一段都设置一套浮式系船设施。
2、目前浮式系船柱在各个船闸闸室已得到广泛应用,而浮式系船柱的位置变化,为了提高稳定性,大都需要配备滚轮和轨道,但是随着水位的上升,轨道内壁容易粘附水中的泥沙,使得滚轮在后续通过时,泥沙会粘附在滚轮上,现有的浮式系泊设备,不方便对滚轮进行重复切换和清理,一方面滚轮上泥沙堆积,对影响滚动效果,造成卡顿和堵塞等情况,而船体重力较大,出现卡顿和堵塞等情况都容易造成设备的损坏,尽管现有技术中通过外部刮除等手段对滚轮进行处理,但是滚轮处于外部,刮除和移动过程中仍然会有部分泥沙粘附,长此以往泥沙仍然会堆积过多,进一步的,现有技术中,大都通过人工站在船体上对缆绳进行固定,不方便利用磁力对不同规格和吃水深度的船体进行自动固定,一方面不同船体驶入后,若要手动系绳,需要浮式系泊设备的位置刚好在对应区域,另一方面频繁的系绳和解绳操作繁琐。
3、针对上述问题,急需在原有浮式系泊设备的基础上进行创新设计。
技术实现思路
1、本发明的目的在于提供一种船舶无绳智能浮式系泊设备及泊船方法,以解决上述背景技术提出现有的浮式系泊设备,不方便对滚轮进行重复切换和清理,同时不方便利用磁力对不同规格和吃水深度的船体进行自动固定的问题,本发明技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案。
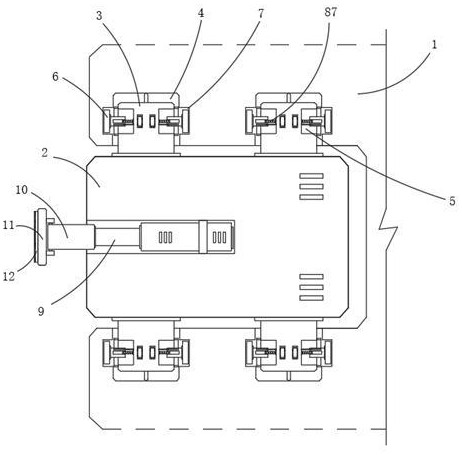
2、为实现上述目的,本发明提供如下技术方案:一种船舶无绳智能浮式系泊设备及泊船方法,包括安装座,所述安装座设置在墙体侧壁空腔内,且安装座内嵌入式固定有控制器,并且安装座的顶部安装有振动传感器和声光报警器,所述安装座的底部固定有浮筒;
3、还包括定位座,所述定位座固定在安装座的前后两侧,且定位座设置于安装槽内,并且安装槽开设在墙体侧壁空腔的边侧位置处,所述定位座的左右两侧均开设有收放槽,且收放槽内设置有滚轮,所述滚轮位于轨道腔内,且轨道腔开设在安装槽的侧壁上,所述定位座内嵌入式设置有切换组件,且切换组件用于切换滚轮的伸出收放;
4、液压缸,所述液压缸嵌入式固定在安装座内,且液压缸的输出端连接有安装柱,并且安装柱的左侧转动安装有安装板,所述安装板位于墙体和安装座的外侧,且安装板的外侧固定有第一电磁铁,并且第一电磁铁的底部边缘处嵌入式安装有压力传感器;
5、锁定组件,所述锁定组件设置在安装板的内侧和安装柱的顶部之间,且锁定组件用于对倾斜后安装板的位置进行锁定。
6、优选的,所述切换组件包括抵触杆,且抵触杆滑动设置在定位座的外侧,并且抵触杆的一端位于安装槽内,所述抵触杆的内端固定有齿条,且齿条通过弹性伸缩杆弹性滑动安装在定位座的中部空腔内,所述齿条的左右两侧均啮合有主齿轮,且主齿轮上啮合有副齿轮,并且副齿轮和主齿轮均在定位座内嵌入式转动安装,所述副齿轮内通过棘轮组件连接有往复丝杆,且往复丝杆转动安装在收放槽内,所述往复丝杆上螺纹套设有活动杆,且活动杆的外端转动安装有滚轮,所述收放槽的内壁上固定有定位柱,且定位柱贯穿设置在活动杆的空腔内,所述定位座的左右两侧固定有刮环,且刮环位于轨道腔的外部。
7、优选的,所述抵触杆的外端设计为半球形结构在安装槽的内壁上贴合滑动,且安装槽的中部设计为凹陷的倾斜结构。
8、优选的,所述往复丝杆通过活动杆带动滚轮在收放槽内伸缩活动,且收放槽在定位座的上下位置处设置有两个,并且两个收放槽内滚轮的初始位置交错分布。
9、优选的,所述刮环的内径等于滚轮的外径,且刮环与滚轮共中心轴线。
10、优选的,所述锁定组件包括伸缩套,且伸缩套转动安装在安装板顶部的内侧,所述伸缩套内滑动安装有伸缩头,且伸缩头的底部位于导槽内,并且导槽开设在安装柱的顶部,所述伸缩套的内壁上开设有侧槽,且侧槽内通过弹簧连接有锁定杆,所述锁定杆的一端位于锁定槽内,且锁定槽开设在伸缩头的外侧,所述锁定杆的侧边固定有金属板,且金属板在侧槽的侧壁空腔内滑动设置,并且侧槽的侧壁空腔内固定有第二电磁铁。
11、优选的,所述伸缩头的底部设计为球形结构,且伸缩头的底部在导槽内嵌入式贴合滑动安装。
12、优选的,所述锁定杆的端部设计为直角梯形结构,且锁定杆端部直角梯形处与锁定槽凹凸配合,并且锁定槽在伸缩头的外侧等间距分布,所述锁定杆端部直角梯形中的斜面向下设置,所述伸缩套和伸缩头在安装板和安装柱之间倾斜设置。
13、优选的,所述该方法包括以下步骤:
14、s1:当船体驶入闸室内,通过控制器启动液压缸,带动安装板上的第一电磁铁向船体靠近,并通过锁定组件对受力倾斜后的安装板和第一电磁铁的位置进行锁定;
15、s2:当压力传感器感应到压力信号时,通过控制器控制第一电磁铁通电,将其固定在船体上;
16、s3:闸室内开始放水,安装座受浮筒浮力上移,并通过切换组件对上下两个滚轮进行切换,将刮除干净的滚轮推出,上次使用的滚轮收放并清理;
17、s4:通过振动传感器感应安装座的震动,超过预定值时,通过控制器将信号传输至后台,并控制声光报警器发出警报。
18、与现有技术相比,本发明的有益效果是:
19、1.本发明,通过液压缸带动第一电磁铁活动与船体表面接触进行吸附固定,配合压力传感器自动检测船体位置,无需船员进行挂绳等操作,进一步的,第一电磁铁在与船体接触后可以转动,应对于不同规格和不同吃水深度的船体,其对应位置处的接触面倾斜度不同,可以增加与船体的接触面积,提高磁性吸附能力,提高对船体的稳固效果,进一步的,通过锁定组件的使用,在第一电磁铁受力倾斜后,可以对倾斜位置进行自动锁定,保证第一电磁铁的稳定使用;
20、2.本发明,在同一竖向位置上设置上下两个滚轮,配合安装槽中部的斜面设计,在利用水位上涨时的浮力实现整体跟随上移的过程中,可以对上下两个滚轮的位置进行切换,并在切换过程中通过刮环对收缩的滚轮外表面进行刮除,配合棘轮组件的使用,使得安装座在完成一次上下位置浮动后,下一次对船体进行稳固时,对滚轮的位置进行切换,使得每次对船体进行稳固时,新的滚轮伸出来使用,一方面可以减少滚轮的磨损,另一方面可以通过每次对滚轮上的泥沙进行刮除,有效避免长时间使用发生卡顿和堵住的问题,保证了该设备的长效稳定使用效果。
技术特征:
1.一种船舶无绳智能浮式系泊设备,包括安装座(2),所述安装座(2)设置在墙体(1)侧壁空腔内,且安装座(2)内嵌入式固定有控制器(14),并且安装座(2)的顶部安装有振动传感器(15)和声光报警器(16),所述安装座(2)的底部固定有浮筒(21);
2.根据权利要求1所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述切换组件(8)包括抵触杆(81),且抵触杆(81)滑动设置在定位座(3)的外侧,并且抵触杆(81)的一端位于安装槽(4)内,所述抵触杆(81)的内端固定有齿条(82),且齿条(82)通过弹性伸缩杆(83)弹性滑动安装在定位座(3)的中部空腔内,所述齿条(82)的左右两侧均啮合有主齿轮(84),且主齿轮(84)上啮合有副齿轮(85),并且副齿轮(85)和主齿轮(84)均在定位座(3)内嵌入式转动安装,所述副齿轮(85)内通过棘轮组件(86)连接有往复丝杆(87),且往复丝杆(87)转动安装在收放槽(5)内,所述往复丝杆(87)上螺纹套设有活动杆(88),且活动杆(88)的外端转动安装有滚轮(6),所述收放槽(5)的内壁上固定有定位柱(89),且定位柱(89)贯穿设置在活动杆(88)的空腔内,所述定位座(3)的左右两侧固定有刮环(810),且刮环(810)位于轨道腔(7)的外部。
3.根据权利要求2所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述抵触杆(81)的外端设计为半球形结构在安装槽(4)的内壁上贴合滑动,且安装槽(4)的中部设计为凹陷的倾斜结构。
4.根据权利要求3所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述往复丝杆(87)通过活动杆(88)带动滚轮(6)在收放槽(5)内伸缩活动,且收放槽(5)在定位座(3)的上下位置处设置有两个,并且两个收放槽(5)内滚轮(6)的初始位置交错分布。
5.根据权利要求3所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述刮环(810)的内径等于滚轮(6)的外径,且刮环(810)与滚轮(6)共中心轴线。
6.根据权利要求1所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述锁定组件(13)包括伸缩套(131),且伸缩套(131)转动安装在安装板(11)顶部的内侧,所述伸缩套(131)内滑动安装有伸缩头(132),且伸缩头(132)的底部位于导槽(133)内,并且导槽(133)开设在安装柱(10)的顶部,所述伸缩套(131)的内壁上开设有侧槽(134),且侧槽(134)内通过弹簧(135)连接有锁定杆(136),所述锁定杆(136)的一端位于锁定槽(137)内,且锁定槽(137)开设在伸缩头(132)的外侧,所述锁定杆(136)的侧边固定有金属板(138),且金属板(138)在侧槽(134)的侧壁空腔内滑动设置,并且侧槽(134)的侧壁空腔内固定有第二电磁铁(139)。
7.根据权利要求6所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述伸缩头(132)的底部设计为球形结构,且伸缩头(132)的底部在导槽(133)内嵌入式贴合滑动安装。
8.根据权利要求6所述的一种船舶无绳智能浮式系泊设备,其特征在于:所述锁定杆(136)的端部设计为直角梯形结构,且锁定杆(136)端部直角梯形处与锁定槽(137)凹凸配合,并且锁定槽(137)在伸缩头(132)的外侧等间距分布,所述锁定杆(136)端部直角梯形中的斜面向下设置,所述伸缩套(131)和伸缩头(132)在安装板(11)和安装柱(10)之间倾斜设置。
9.根据权利要求1-8任意一项所述的一种船舶无绳智能浮式系泊设备的泊船方法,其特征在于:该方法包括以下步骤:
技术总结
本发明公开了一种船舶无绳智能浮式系泊设备及泊船方法,包括安装座,所述安装座设置在墙体侧壁空腔内,且安装座内嵌入式固定有控制器,并且安装座的顶部安装有振动传感器和声光报警器,所述安装座的底部固定有浮筒;还包括定位座,所述定位座固定在安装座的前后两侧,所述定位座的左右两侧均开设有收放槽,所述滚轮位于轨道腔内,且轨道腔开设在安装槽的侧壁上,所述定位座内嵌入式设置有切换组件,所述液压缸嵌入式固定在安装座内,所述安装板位于墙体和安装座的外侧。该船舶无绳智能浮式系泊设备及泊船方法,通过每次对滚轮进行切换和清理,有效避免泥沙过多粘附,同时适用于不同规格和吃水深度的船体。
技术研发人员:孙刘林,张雷,杜永春,邢伟,胡升,黄少东,李艾菁,高悦
受保护的技术使用者:安徽省交通科学研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!