一种水电站水下机器人的子机加装层的制作方法
本技术涉及水下机器人,尤其涉及一种水电站水下机器人的子机加装层。
背景技术:
1、通常的水下检测采用可遥控的水下机器人进行,水下机器人具备信号接收器、高亮led灯、高清数字摄像头以及螺旋桨推进器,通过线缆连接水下机器人,线缆缠绕在收卷机构上,在水下机器人使用完毕后,通过收卷机构进行回收。但在水电站水下坑洞检测时,由于检测区域较深,线缆的长度要求高,进入坑洞易挂线,导致水下机器人的损坏,而且,体积较大的水下机器人的电能供应线缆要求高,成本大。
技术实现思路
1、针对现有技术中所存在的不足,本实用新型提供了一种水电站水下机器人的子机加装层,其解决了现有技术中存在的大体型的水下机器人进行坑洞检修时使用不方便且成本高的问题。
2、根据本实用新型的实施例,一种水电站水下机器人的子机加装层,包括可拆装的连接在水下机器人母机上的连接架、固定安装在连接架一端的收放仓、固定设置于连接架上的收卷机构以及通过缆绳与收卷机构连接的子机,子机上配备有摄像头、探照灯以及螺旋桨推进器,子机通过缆绳与母机电信连接,子机可容纳于收放仓内。
3、优选的,所述收卷机构和收放仓之间设置有用于监测所述缆绳收放绳的高亮led灯和收放绳摄像头。
4、优选的,所述连接架上设置有电磁接近开关,所述缆绳的两端分别安装有磁环,电磁接近开关设置于所述收卷机构和收放仓之间。
5、优选的,所述收放仓的顶设设置有照明灯,所述收放仓的一侧设置有子机检测摄像头,照明灯和子机检测摄像头均朝向所述收放仓的入口端设置。
6、优选的,所述子机上配备的所述螺旋桨推进器包括水平横向推进器、水平纵向推进器和升降推进器。
7、相比于现有技术,本实用新型具有如下有益效果:
8、通过安装架将小体型的子机搭载在水下机器人母机上,水下机器人通过缆绳电信连接子机,在控制水下机器人移动到设定深度位置后,通过控制子机移动进行坑洞的检测,子机体型更小,检测使用更灵活方便;水下机器人到达设定位置后即保持悬浮,对子机的螺旋桨推进器供能,能耗较低,可通过配备蓄电池实现,进而无需为水下机器人配备直接供电的线路,降低了成本。
技术特征:
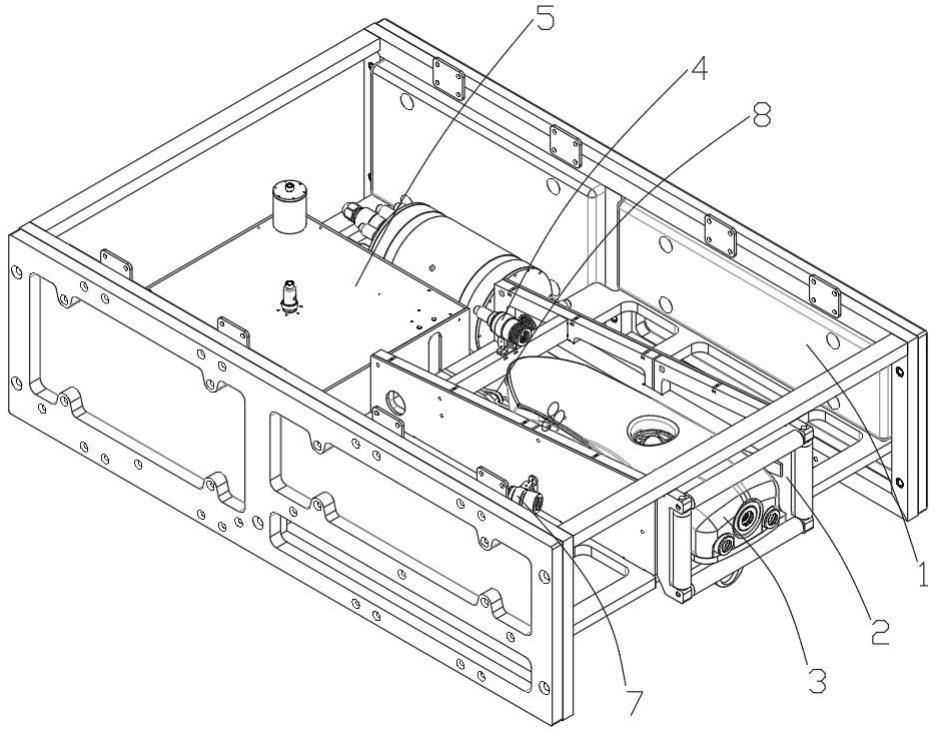
1.一种水电站水下机器人的子机加装层,其特征在于:包括可拆装的连接在水下机器人母机上的连接架(1)、固定安装在连接架(1)一端的收放仓(2)、固定设置于连接架(1)上的收卷机构(5)以及通过缆绳(8)与收卷机构(5)连接的子机(3),子机(3)上配备有摄像头、探照灯以及螺旋桨推进器,子机(3)通过缆绳与母机电信连接,子机(3)可容纳于收放仓(2)内。
2.如权利要求1所述一种水电站水下机器人的子机加装层,其特征在于:所述收卷机构(5)和收放仓(2)之间设置有用于监测所述缆绳(8)收放绳的高亮led灯和收放绳摄像头(6)。
3.如权利要求1所述一种水电站水下机器人的子机加装层,其特征在于:所述连接架(1)上设置有电磁接近开关,所述缆绳(8)的两端分别安装有磁环,电磁接近开关设置于所述收卷机构(5)和收放仓(2)之间。
4.如权利要求1所述一种水电站水下机器人的子机加装层,其特征在于:所述收放仓(2)的顶设置有照明灯(4),所述收放仓(2)的一侧设置有子机检测摄像头(7),照明灯(4)和子机检测摄像头(7)均朝向所述收放仓(2)的入口端设置。
5.如权利要求1所述一种水电站水下机器人的子机加装层,其特征在于:所述子机(3)上配备的所述螺旋桨推进器包括水平横向推进器、水平纵向推进器和升降推进器。
技术总结
本技术提供了一种水电站水下机器人的子机加装层,包括可拆装的连接在水下机器人母机上的连接架、固定安装在连接架一端的收放仓、固定设置于连接架上的收卷机构以及通过缆绳与收卷机构连接的子机,子机上配备有摄像头、探照灯以及螺旋桨推进器,子机通过缆绳与母机电信连接,子机可容纳于收放仓内。本技术产生了提高水电站水下坑洞检测效率和成本的效果。
技术研发人员:赵春禄,李新宇,许家铭,张易,万刚,梁强,严飞
受保护的技术使用者:中国长江电力股份有限公司
技术研发日:20230404
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!