水下机器人收放装置的制作方法
本技术涉及机器人,尤其涉及一种水下机器人收放装置。
背景技术:
1、随着工业技术的进步,我国机器人技术逐渐提高,极大的提高了我国工业自动化程度。对于一些在特殊环境中工作的专用机器人,如水下环境工作的机器人,需要相应的机器人收放装置以将其送至液体环境中部署,防止人工收放机器人时恶劣环境对工作人员造成伤害。同时,机器人工作时产生的废物碎屑等,若不及时清理可能会破坏机器人工作环境,影响机器人工作,或者破坏生态环境,因此需要及时对废物碎屑等进行清理。
2、因此,设计一种与机器人相应配套的机器人收放装置对于保护工作人员安全、保证机器人安全高效工作具有重要意义。
技术实现思路
1、本实用新型要解决的技术问题在于,提供一种实现机器人收放同时能够及时清理机器人工作产生碎屑的水下机器人收放装置。
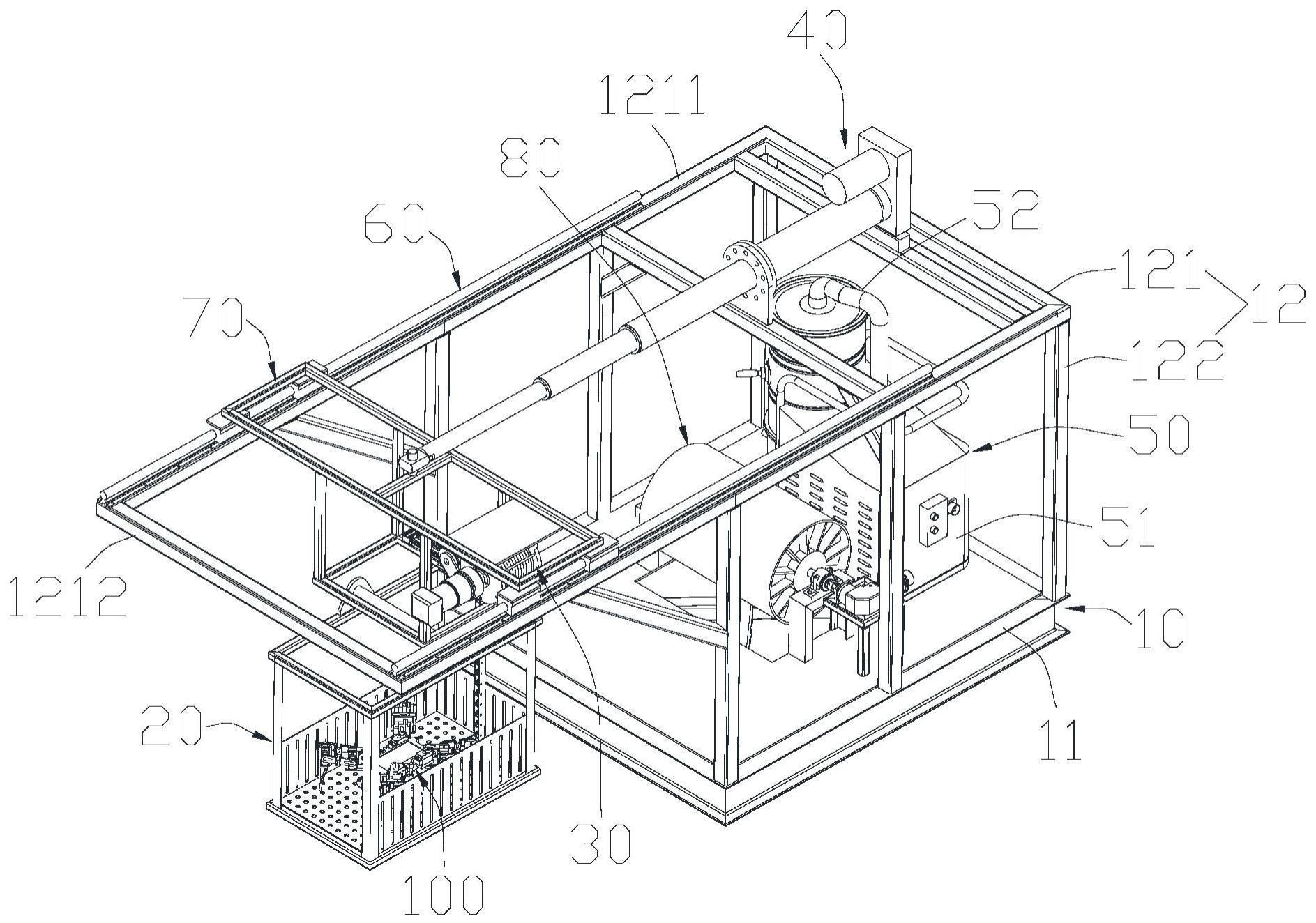
2、本实用新型解决其技术问题所采用的技术方案是:提供一种水下机器人收放装置,包括收放平台、用于装载机器人的吊篮、设置在所述收放平台上的绞绳收放机构、平移机构以及废液回收单元;
3、所述绞绳收放机构通过绞绳连接并驱动所述吊篮相对所述收放平台在竖直方向上下移动;所述平移机构连接并驱动所述绞绳收放机构和吊篮相对所述收放平台在水平方向上来回移动;
4、所述废液回收单元连接有随机器人下放并回收机器人工作产生的碎屑的回收管。
5、优选地,所述收放平台包括平台基座、设置在所述平台基座上的框架;
6、所述绞绳收放机构可活动设置在所述框架的顶框上,所述平移机构设置在所述框架的顶框上,连接并驱动所述绞绳收放机构在所述顶框的长度方向上来回移动。
7、优选地,所述水下机器人收放装置还包括设置在所述顶框上的导轨、横跨在两个所述导轨上并可沿所述导轨滑动的滑架,所述导轨沿所述顶框的长度方向延伸;
8、所述绞绳收放机构与所述滑架连接,随所述滑架可沿所述导轨滑动;
9、所述平移机构连接在所述顶框和滑架之间,用于驱使所述滑架沿所述导轨来回滑动。
10、优选地,所述顶框包括正对在所述平台基座上方的顶部、与所述顶部水平相接并位于所述平台基座外的延伸部,所述导轨设置在所述顶部和延伸部上;
11、所述吊篮通过所述平移机构在所述顶部和延伸部之间来回移动。
12、优选地,所述平移机构包括多级伸缩缸,或者包括相接的螺杆和电机。
13、优选地,所述绞绳收放机构包括绞盘机,所述绞盘机上绕设有所述绞绳。
14、优选地,所述多级伸缩缸为多级电缸;所述绞盘机为电动绞盘机。
15、优选地,所述废液回收单元包括废液回收容器。
16、优选地,所述废液回收单元还包括连接所述废液回收容器的动力泵。
17、优选地,所述水下机器人收放装置还包括将机器人和机器人控制系统之间的电缆进行收放的电缆卷筒,所述电缆卷筒设置在所述收放平台上。
18、优选地,所述水下机器人收放装置还包括收放控制系统,所述收放控制系统分别与所述绞绳收放机构、平移机构和废液回收单元电连接。
19、本实用新型的有益效果:通过收放平台上的绞绳收放机构和平移机构配合精确控制吊篮及其装载的机器人的收放,减少在特殊环境中(如强辐射、高温、低温等)工作时环境对工作人员的伤害;同时,通过废液回收单元的回收管随机器人下放并回收机器人工作产生的碎屑,保证了机器人处于较好的工作环境,减少了机器人故障的发生。
技术特征:
1.一种水下机器人收放装置,其特征在于,包括收放平台、用于装载机器人的吊篮、设置在所述收放平台上的绞绳收放机构、平移机构以及废液回收单元;
2.根据权利要求1所述的水下机器人收放装置,其特征在于,所述收放平台包括平台基座、设置在所述平台基座上的框架;
3.根据权利要求2所述的水下机器人收放装置,其特征在于,所述水下机器人收放装置还包括设置在所述顶框上的导轨、横跨在两个所述导轨上并可沿所述导轨滑动的滑架,所述导轨沿所述顶框的长度方向延伸;
4.根据权利要求3所述的水下机器人收放装置,其特征在于,所述顶框包括正对在所述平台基座上方的顶部、与所述顶部水平相接并位于所述平台基座外的延伸部,所述导轨设置在所述顶部和延伸部上;
5.根据权利要求1至4任一项所述的水下机器人收放装置,其特征在于,所述平移机构包括多级伸缩缸,或者包括相接的螺杆和电机;
6.根据权利要求5所述的水下机器人收放装置,其特征在于,所述多级伸缩缸为多级电缸;所述绞盘机为电动绞盘机。
7.根据权利要求1所述的水下机器人收放装置,其特征在于,所述废液回收单元包括废液回收容器。
8.根据权利要求7所述的水下机器人收放装置,其特征在于,所述废液回收单元还包括连接所述废液回收容器的动力泵。
9.根据权利要求1至4任一项所述的水下机器人收放装置,其特征在于,所述水下机器人收放装置还包括将机器人和机器人控制系统之间的电缆进行收放的电缆卷筒,所述电缆卷筒设置在所述收放平台上。
10.根据权利要求1至4任一项所述的水下机器人收放装置,其特征在于,所述水下机器人收放装置还包括收放控制系统,所述收放控制系统分别与所述绞绳收放机构、平移机构和废液回收单元电连接。
技术总结
本技术公开了一种水下机器人收放装置,包括收放平台、吊篮、设置在收放平台上的绞绳收放机构、平移机构以及废液回收单元;所述绞绳收放机构连接并驱动所述吊篮相对收放平台在竖直方向上下移动;所述平移机构连接并驱动绞绳收放机构和吊篮相对收放平台在水平方向上来回移动;所述废液回收单元接有回收机器人工作产生的碎屑的回收管。本技术的水下机器人收放装置,通过收放平台上的绞绳收放机构和平移机构配合精确控制吊篮及其装载的机器人的收放,减少在特殊环境中工作时环境对工作人员的伤害;同时,通过废液回收单元的回收管随机器人下放并回收机器人工作产生的碎屑,保证了机器人处于较好的工作环境,减少了机器人故障的发生。
技术研发人员:周建华,季松棣,肖付虎,田广政,付建鹏,张泽勇,郭勇强,李玉军,折东东,潘瑞堂
受保护的技术使用者:中广核核电运营有限公司
技术研发日:20230506
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!