一种水下生态数据采集和能源勘探仿生水母机器人
本发明专利涉及水下数据与能源采集的,是一种收集水下生态环境数据的仿生水母机器。
背景技术:
1、现今,大多水下生态观察作业是由真人亲自下海观察的方式,这样会有续航短,前进深度有限,人员伤亡的风险,成本高的不利因素,无法有效完成生态勘探任务;当下的传统机器人勘探,其有体积较大,行径时会伴有较大的噪音,同时其耗能也是较大。因其有较大的体积,在一些狭小和凹凸的地形无法高效进行任务,和在观察生物生态时由于其噪音容易惊吓到目标生物,导致观察失败,同时该种机器排出的有害物质也会污染生态,使收集数据结果不精确,最终导致任务无法完成。
2、经检索,申请公布号为202220846746.4的发明专利申请本发明公开了一种采矿机器人及采矿作业设备,具体是指一种采矿机器人及采矿作业设备,一种采矿机器人,包括机架,机架上设有绞吸作业机构和采集舱,采集舱上设有抽吸机构,抽吸机构包括抽吸壳体、动力叶轮和抽吸电机,采集舱上设有卸料机构,卸料机构可以由第一舱门、第二舱门、第一电推杆和第二电推杆组成,也可以由壳体翻转电推杆、翻斗推杆、卸料门和卸料门推杆组成,绞吸作业机构包括机械臂、绞吸头、绞吸电机和绞吸管路,一种采矿作业设备,包括水上动力平台,水上动力平台下方设有上述所述的采矿机器人,水上动力平台上设有平台推进器,水上动力平台下方设有动力架,采矿机器人一侧设有集料机构,使其有高的能源采集效率,但上述水下机器仍存在以下问题:
3、1、该设备行动是需要与水上动力台用电缆连接进行充电,这样大大降低了设备移动范围,无法完成大范围的能源勘探。
4、2、该设备是利用履带行走机构来移动,这样在面对海中岩石块的撞击有卡带而无法移动的风险,防撞能力较差,无法实现流畅运动。
5、3、该设备运动行为机构只有履带,运动方式单一,面对需要上下移动的情况该机器无法有效应对,对特殊地形的适应性较差。
技术实现思路
1、有鉴于现有技术的上述缺陷,本实用新型的目的在于提供一种水下生态数据采集和能源勘探仿生水母机器人,使能量耗损更少,增加机器运作时间,在面对复杂崎岖地形时更加灵活,方便行动。
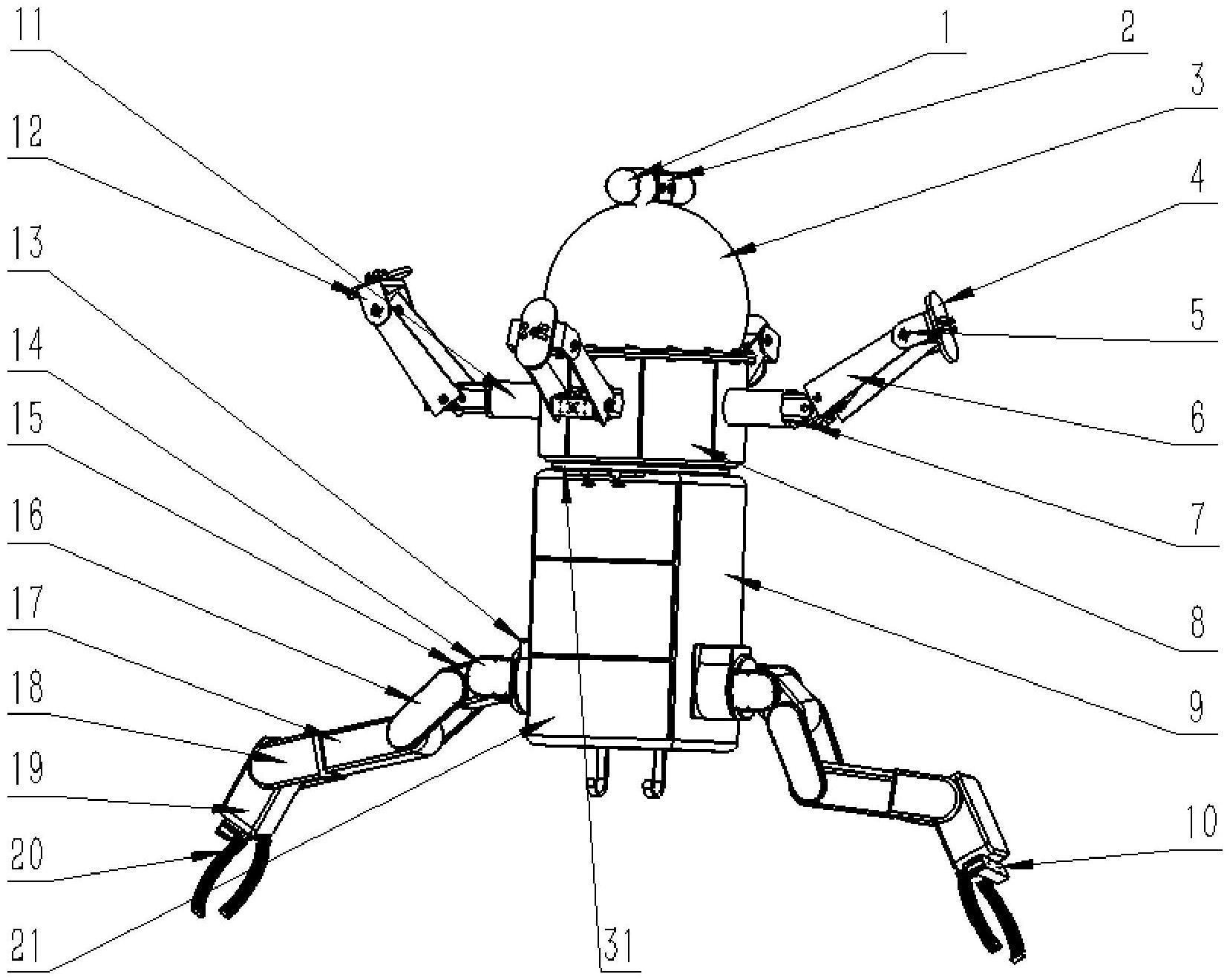
2、本实用新型的技术方案为:一种水下生态数据采集和能源勘探仿生水母机器人,包括:箱体壳、头部照明识别装置、电机连杆驱动装置、下层箱体装置和机械爪臂装置;所述头部照明识别装置包括微型照明装置和视觉识别装置,所述微型照明装置安装在所述箱体壳的外部,所述视觉识别装置安装在所述箱体壳的内部;所述电机连杆驱动装置内设有调整舵机、电机和转动凸轮,所述电机的传动轴带动所述转动凸轮,所述传动凸轮轮廓处放置有圆形滚轮,所述圆形滚轮固定在传动连柱中间,长方连柱叠夹在所述圆形滚轮的上下两侧,所述长方连柱固定在所述传动连柱中间,所述调整舵机固定在所述传动连柱的尾部,所述调整舵机两边分别连着两片t型连杆,u型档板将两片所述t型连杆固定在相互平行的相对位置,且所述u型挡板和椭圆形卡扣链合;所述下层箱体装置设有收集空间、传感模块和检测模块;所述机械爪臂装置安装在所述下层箱体装置外表面的两侧;所述箱体壳与转动转盘相连并与所述电机的下转动轴链接固定。
3、进一步的,所述头部照明识别装置设有u型铝固槽,通过所述u型铝固槽来固定所述视觉识别装置。
4、进一步的,所述圆形滚轮与所述长方连柱通过双头螺栓固定在传动连柱上。
5、进一步的,所述椭圆形卡扣与所述u型挡板用螺丝固定。
6、进一步的,所述转动转盘与所述电机的传动轴链接固定。
7、进一步的,所述下层箱体装置为多层结构。
8、进一步的,所述检测模块安装在所述箱体壳的外部,所述传感模块安装在所述箱体壳的内部。
9、进一步的,所述机械爪臂装置对称分布。
10、与现有的技术相比,本实用新型的有益效果是:
11、(1)采用了电机连杆驱动装置,由单个电机的转动再利用连杆连接对力的转换来完成驱动,仅由一个电机工作,使能量耗损更少,增加机器运作时间。
12、(2)采用了多舵机调控运动装置,利用外部的多个舵机调整水母左右开合运动的幅度,使机器在面对撞击,生物干扰等突发情况有更多应对方式。
13、(3)采用了机械臂攀爬装置,利用高自由度的机械爪臂通过抓爬方式在崎岖地形进行移动,使机器在面对复杂崎岖地形时更加灵活,方便行动。
技术特征:
1.一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,包括:箱体壳、头部照明识别装置、电机连杆驱动装置、下层箱体装置和机械爪臂装置;所述头部照明识别装置包括微型照明装置和视觉识别装置,所述微型照明装置安装在所述箱体壳的外部,所述视觉识别装置安装在所述箱体壳的内部;所述电机连杆驱动装置内设有调整舵机、电机和转动凸轮,所述电机的传动轴带动所述转动凸轮,所述转动凸轮轮廓处放置有圆形滚轮,所述圆形滚轮固定在传动连柱中间,长方连柱叠夹在所述圆形滚轮的上下两侧,所述长方连柱固定在所述传动连柱中间,所述调整舵机固定在所述传动连柱的尾部,所述调整舵机两边分别连着两片t型连杆,u型挡板将两片所述t型连杆固定在相互平行的相对位置,且所述u型挡板和椭圆形卡扣链合;所述下层箱体装置设有收集空间、传感模块和检测模块;所述机械爪臂装置安装在所述下层箱体装置外表面的两侧;所述箱体壳与转动转盘相连并与所述电机的下转动轴链接固定。
2.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述头部照明识别装置设有u型铝固槽,通过所述u型铝固槽来固定所述视觉识别装置。
3.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述圆形滚轮与所述长方连柱通过双头螺栓固定在传动连柱上。
4.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述椭圆形卡扣与所述u型挡板用螺丝固定。
5.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述转动转盘与所述电机的传动轴链接固定。
6.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述下层箱体装置为多层结构。
7.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述检测模块安装在所述箱体壳的外部,所述传感模块安装在所述箱体壳的内部。
8.根据权利要求1所述一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,所述机械爪臂装置对称分布。
技术总结
本技术公开一种水下生态数据采集和能源勘探仿生水母机器人,其特征在于,包括:箱体壳、头部照明识别装置、电机连杆驱动装置、下层箱体装置和机械爪臂装置;所述头部照明识别装置固定于在所述电机连杆驱动装置上方;所述电机连杆驱动装置固定在所述下层箱体装置的上方;所述机械爪臂装置固定在所述下层箱体装置固定在的两侧。面对突发情况有更多应对方式;能量耗损少,增加机器运作时间;在面对复杂地形时更加灵活,方便行动。
技术研发人员:林海,袁卓轩,陈凯锐,唐睿智,林逸轩,刘嘉睿,苏智文,余昕芪,李少洋,李可
受保护的技术使用者:广州大学
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!