一种用于海洋勘测的水下机器人及其控制系统的制作方法
本发明涉及水下机器人控制,尤其涉及一种用于海洋勘测的水下机器人及其控制系统。
背景技术:
1、水下机器人是一种具有自主移动能力的机器人,专门用于在水下环境中执行各种任务,其技术背景涉及先进的水下定位和导航技术,高精度的传感器系统(如声纳、摄像头等),复杂的控制算法以及防水设计等方面。水下机器人广泛应用于海洋科学研究、海底勘探、海洋资源开发、海洋环境监测等领域,通过不断的技术创新和优化,提高了水下任务执行的效率、精度和安全性,对推动海洋科学和工程领域的发展起到了重要作用。
2、中国专利公开号cn114779712b公开了一种水下机器人控制系统,包括:传感器模块;控制器模块,其包括主控单元和fpga单元;主控单元接收传感器模块检测的信息并对其解析处理,以获取到水下机器人的实际状态信息,主控单元计算水下机器人的参考目标值和实际状态信息之间的误差,作为鲁棒控制器的输入值;fpga单元包括fpga逻辑端和hps端,fpga逻辑端通过hps端与主控单元双向通信,且fpga逻辑端用于并行执行鲁棒控制器的矩阵运算;多个推进器,主控单元接收鲁棒控制器的输出值,根据输出值进行力矩分配,且将所分配力矩对应的多个控制信号分别输出至多个推进器。本发明能够使水下机器人实时且稳定的鲁棒控制。由此可见该发明存在以下问题:未考虑水下机器人在遇到障碍物时如何继续勘测任务。
技术实现思路
1、为此,本发明提供一种用于海洋勘测的水下机器人及其控制系统,用以克服现有技术中水下机器人遇到障碍物时反应不灵敏的问题。
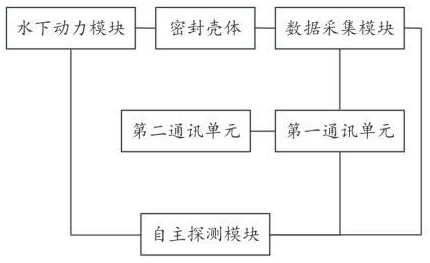
2、为实现上述目的,一方面,本发明提供一种用于海洋勘测的水下机器人,包括:密封壳体,用以抵抗水下高压环境并隔绝海水以保护壳体内部组件免受海水侵蚀;
3、水下动力模块,其与所述壳体相连,用以提供水下机器人在水中移动的动力;
4、数据采集模块,其与所述壳体相连,用以收集水下数据;
5、通讯模块,其与所述数据采集模块相连,包括设置在所述密封壳体内部与数据采集模块相连的第一通讯单元,以及设置在密封壳体外并与第一通讯单元相连用以将所述水下数据发送至水面的接收站的第二通讯单元;
6、自主探测模块,其分别与所述水下动力模块、所述数据采集模块以及所述通讯模块相连,用以根据设定的航线控制水下动力模块工作,根据所述水下数据判定是否触发测障条件,在达到测障条件时控制通讯模块与水面接收站连接以确定水面测障坐标,以及根据收集的水下测障位置的水下数据确定障碍区域。
7、进一步地,第二通讯单元包括:
8、第二通信壳体,其设在所述密封壳体外部,为一密封式的壳体;
9、有线通信组件,其设置在所述第二通信壳体内部与所述第一通讯单元通过有线通信方式相连,用以传输所述水下数据;
10、定位组件,其与所述第二通信壳体相连,用以确定第二通信壳体的当前位置坐标;
11、上浮组件,其设置在所述第二通信壳体内部,用以在达到测障条件时控制所述第二通信壳体上浮至水面以使定位组件获取当前位置坐标,以及,将有线通信组件获取的所述水下数据传输至水面的接收站。
12、进一步地,数据采集模块包括执行多波束测深的声呐装置、位于水下机器人头部用以拍摄机器人在水下活动时遇到障碍物时的障碍照片的水下相机、用以通过测量有线通信组件的拉伸传感数据计算所述第一通讯单元和第二通讯单元相对位置的压力传感器组和线路长度传感器。
13、进一步地,自主探测模块根据声呐装置在预设角度探测到的障碍物数量是否超过预设数量确定是否触发测障条件;
14、若所述声呐装置探测到的障碍物数量大于等于预设数量时,则判定触发测障条件并控制所述数据采集模块拍摄水下障碍物的障碍照片;
15、若所述声呐装置探测到的障碍物数量小于预设数量时,则判定未触发测障条件。
16、另一方面,本发明还提供一种用于海洋勘测的水下机器人的控制系统,包括:
17、通信获取模块,其与设置在水下机器人密封壳体外部用以将水下数据发送至水面接收站的第二通讯单元相连,用以获取水下机器人传输的水下数据以及水下机器人的水面通信位置坐标;
18、勘测标记模块,其与所述通信获取模块相连,用以根据所述水下数据绘制水下地图以标记水下障碍物坐标和范围;
19、控制模块,其分别与所述通信获取模块以及所述勘测标记模块相连,用以根据所述水下数据和水下机器人的水面通信位置坐标确定水下测障位置坐标,根据水下数据中障碍密集度确定水下障碍分布状态和分布范围,以及根据所述障碍分布状态确定水下机器人的勘测策略;
20、其中,所述水下数据包括海底地形、温度、水流速度、水流方向、障碍照片以及水下机器人本体与水下机器人本体有线连接的水面通信组件间的压力传感数据和线路长度数据。
21、进一步地,控制模块根据获取的压力传感数据、水流方向以及有线通信线路长度确定水下机器人与水面通信组件间的相对位置,并根据所述相对位置以及所述水面通信位置确定水下测障位置坐标。
22、进一步地,控制模块根据所述障碍照片确定障碍物是否为水下机器人的运动路线范围内的实际障碍;
23、其中,水下机器人的运动路线范围为水下机器人的预设路线左右两侧各加宽预设宽度。
24、进一步地,所述控制模块根据所述实际障碍的障碍密集度确定障碍分布状态并确定水下机器人的勘测策略;
25、若所述障碍密集度处于第一预设范围,则所述控制模块判定处于第一预设障碍分布状态,并将勘测策略确定为穿入勘测;
26、若所述障碍密集度处于第二预设范围,则所述控制模块判定处于第二预设障碍分布状态,并将勘测策略确定为绕行勘测。
27、进一步地,所述控制模块根据勘测策略控制水下机器人移动并保持第二通讯单元上浮,控制模块根据水下机器人在水下移动的距离与第二通讯单元移动距离的差距确定有线通信线路长度是否准确,并计算所述水下障碍物坐标的偏差。
28、进一步地,控制模块根据以各所述实际障碍为圆心的预设半径内的标准圆内的其他实际障碍数量确定所述障碍密集度。
29、与现有技术相比,本发明的有益效果在于,本发明提供的水下机器人水下环境适应性强、自主控制能力也强,通过是否触发测障条件提高通讯效率和数据传输的效率,以提高海洋勘测的效率:通过自主探测模块的设定航线和数据采集模块的信息收集,可以实现更高效、精确的海洋勘测,提高勘测的效率和准确性;密封壳体和水下动力模块的设计保证了机器人能够在严苛的水下高压环境下工作,并有效抵抗海水侵蚀,增强了机器人对各种水下环境的适应能力;自主探测模块使得机器人能够自主进行航线控制和障碍检测,不需要过多人工干预,提高了机器人的自主性和灵活性;通讯模块的设置确保了机器人可以在触发测障条件时将采集到的数据发送至水面接收站,以实现有效地监测和数据传输,提高了海洋勘测的及时性和工作效率。
30、进一步地,本发明中第二通讯单元水下通过有线通讯组件增强了数据传输可靠性,且提高了水下机器人的水下测障位置和水面测障位置坐标的准确性;通过有线通信组件在第二通信壳体内部的设置,可以确保水下数据的传输稳定可靠,避免无线通信可能存在的干扰或信号弱化问题;定位组件与第二通信壳体相连,可以准确确定第二通信壳体的当前位置坐标,为水下勘测和障碍检测提供更加精准的位置信息;上浮组件的设置使得第二通信壳体能够在触发测障条件时迅速上浮至水面,以确保定位组件获取当前位置坐标,并将水下数据传输至外部,为后续机器人的勘测和分析工作提供支持。
31、进一步地,本发明提供的水下机器人的控制系统通过通信获取模块、勘测标记模块和控制模块的组合,可以高效地获取水下数据、绘制水下地图并标记水下障碍物的坐标和范围,从而使海洋勘测工作更加精确和迅速;其中,控制模块根据水下数据和水下机器人的位置信息,确定水下测障位置坐标、障碍分布状态和范围,以及制定水下机器人的勘测策略,提供了智能化的支持以优化了勘测过程和结果;本系统还通过压力传感数据和线路长度数据等信息,实现对水下机器人位置的监测和环境参数的测量,增强了机器人在水下环境中的自主性和适应性,提高了勘测的全面性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!