一种野外救援光伏无人机
1.本实用新型涉及野外救援设备技术领域,特别涉及一种野外救援光伏无人机。
背景技术:
2.随着人民富足,思想的解放,越来越多的年轻人喜欢户外运动,接触自然,同样的户外受难人数逐年升高。这也给救援人员带来了很大压力。这时候使用无人机参与人工救援无疑会大大增加其搜救效率,为受伤人员争取宝贵时间,无人机飞在空中可以避免像人工一样跋山涉水,巡查效率更高,巡查面积更大。但由于户外运动多在偏远山区或是戈壁。电力紧缺,供电不便,使无人机充电成为一大难题,并且大面积山区,戈壁需要无人机长时间巡航,一般小型无人机没有如此长时间的续航能力。但现有的太阳能无人机可以完成长时间的巡航。
3.然而由于光伏发电技术的不完善,太阳能电池板转换效率很低,不足以支撑小型光伏无人机的电量供给,因此只有制作大型无人机,让该种无人机单位平均重量减轻,才能勉强单位面积所发电量满足飞行所需求电量,但重量减轻带来结构不稳定,没有额外载重能力,以及野外环境因素多变等问题,大型太阳能无人机几乎不能使用。
技术实现要素:
4.本实用新型的目的是提供一种野外救援光伏无人机,采用飞翼布局,具有良好的气动特性和载重能力,机身内部可以自由搭配电子设备适应不同时期不同需求。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种野外救援光伏无人机,包括机体,机体两侧连接有机翼,机翼后翼面搭载光伏板;机体内设有机前舱和机后舱,机前舱位于无人机前端,机后舱位于飞机重心后侧,其连接有用于放置铁块的配重位;
7.每个机翼下表面都嵌入第一碳纤维管和第二碳纤维管,第一碳纤维管和第二碳纤维管皆沿机翼长度方向设置;
8.所述机体尾部连接有螺旋桨以及驱动螺旋桨转动的驱动电机。
9.更进一步地,两机翼之间连接有若干碳纤维管。
10.更进一步地,所述机前舱下底面包括上木板、中间夹板和下木板,上木板为竹编板,中间夹板为发泡板,下木板为胶合板。
11.更进一步地,机头正前方开设有孔洞,孔洞内嵌圆形镜头运动相机,用于观察飞行路线。
12.更进一步地,所述机体底部配置用于观察监视目标的可调焦高清镜头。
13.更进一步地,所述机前舱内安装有飞行控制器和两锂电池;
14.其中一锂电池供电,光伏电池板发电、再经过整流器整流后给另一锂电池充电;
15.所述飞行控制器连接于信号转换器,信号转换器另一端连接于电子继电器,信号转换器用于将飞行控制器发出的pwm信号转化为电子继电器可识别的模拟电压信号,电子
继电器分别用于控制光伏板与两锂电池充电保护板的通与断、两锂电池与飞行控制器的通与断。
16.更进一步地,所述飞行控制器可高度集成气压计、陀螺仪、加速度计,气压计用于测量此时大气压强,陀螺仪及加速度计用于测量物体三轴姿态角以及加速度。
17.更进一步地,所述飞行控制器还连接于gps,gps用于定位无人机所在位置。
18.更进一步地,所述飞行控制器上还集成有osd模块,osd模块用于将飞行器的状态整合到osd模块,然后osd模块把监控的数据返回到终端。
19.更进一步地,所述飞行控制器连接于图传发射端,图传发射端用于把实时图像信号转化为电磁波发射出去。
20.综上所述,本实用新型具有以下有益效果:
21.1)采用太阳能的充电方式,将光伏发电技术与无人机巧妙地结合起来,在航行中也能充电,实现光伏无人机的持久续航,节能环保,不受救援地电力制约;搭载大功率光伏板,可以大大增加飞行半径和飞行时长,不需要频繁更换电池,当执行山区或无人区救援时时,由于电力系统不完善,无法为一般无人机充电,该无人机可直接通过阳光为电池充电;
22.2)采用当前新式飞翼布局,具有良好的气动特性和载重能力,机身内部可以自由搭配电子设备适应不同时期不同需求;相比于常规布局,飞翼布局无人机具有更低的废阻力和重量,具有较好的失速性能,不易发生尾旋,具有更好的螺旋模态稳定性等优势;该无人机相比于现阶段平直翼无人机的不同点是采用翼身一体布局,经实际测试该种布局更坚固,结构稳定性更好;
23.3)稳定抗变形的结构,一体的造型,拥有良好的安全性;
24.4)机翼是特制混合翼,失速临界迎角大且可铺设光伏板面积大;
25.5)采用双蓄电池轮流供电的方式,没有直接采用太阳能的供电,电流更稳定,飞机尺寸大大减小,方便野外携带。
附图说明
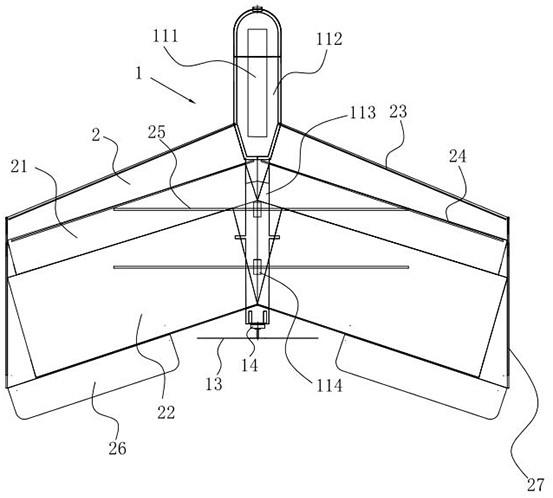
26.图1是本实用新型的整体结构示意图;
27.图2是本实用新型中机前舱部分的侧面结构示意图;
28.图3是图2沿c-c方向的剖视图;
29.图4是本实用新型中电路模块的连接示意图。
30.图中,1、机体;111、上木板;112、中间夹板;113、下木板;114、管夹;13、螺旋桨;14、驱动电机;2、机翼;21、20w光伏板;22、50w光伏板;23、第一碳纤维管;24、第二碳纤维管;25、斜纹碳纤维管;26、副翼;27、翼梢小翼。
具体实施方式
31.下面结合附图对本实用新型的具体实施方式作进一步说明,本实施例不构成对本实用新型的限制。
32.一种野外救援光伏无人机,如图1所示,包括机体1,机体1两侧一体连接有机翼2,机翼2为带有后掠角的梯形机翼2,以减少飞行阻力,机翼2后缘连接有副翼26,飞机机翼2的翼梢处安装有翼梢小翼27,机翼2后翼面上搭载有用于进行光伏发电的光伏板,皆包括20w
光伏板21和50w光伏板22,避免无人机降落过程中损坏光伏板;
33.机体1内设有位于无人机前端的机前舱、位于无人机中后部的机后舱,机后舱位于飞机重心后侧;
34.本实施例采用飞翼式布局,单位面积载重相比较于普通布局无人机更大,飞行效率更高,机体1可搭载光伏板的面积比例更大;机翼2机身直接固定,并保留各种电子设备的安装拆卸空间和安装孔,为以后的电子器件的维修和替换提供方便;通过机前舱、机后舱两个设备舱,方便增减无人机设备时调整无人机的重心。
35.如图1所示,机前舱长50cm,宽15cm,其还包括上方的epp板以构成机舱整体,机前舱前端呈半圆形,防止降落受力集中一点,造成损坏,同时减少风阻;机头整体近似流线型,以减少空气阻力。
36.如图2和图3所示,机前舱下底面包括上木板111、中间夹板112和下木板113,上木板111为竹编板,中间夹板112为发泡板,下木板113为胶合板,中间用泡沫胶粘合,即采用该种两层木板夹泡沫板的结构;
37.如图1所示,每个机翼2下表面都嵌入有直径3mm的第一碳纤维管23和直径4mm的碳管的第二碳纤维管24来加固,第一碳纤维管23和第二碳纤维管24皆沿机翼2长度方向设置,第一碳纤维管23位于20w光伏板21前沿,而第二碳纤维管24位于50w光伏板22前端,以对机翼2的冲击能最大程度吸收,从而避免损坏;
38.左右机翼2之间连接有两根直径7mm长100cm的斜纹碳纤维管25,下木板113长105cm(延伸至机尾),两根7mm碳纤维管中部通过工程塑料管夹114固定在下木板113上,使机翼2与机体1连接更牢固;
39.在机体1的机头前方和正下方都固定有减震泡沫,飞机正常着陆时一般减震泡沫先着地,起着快速停止的作用,以减轻内部电子设备所受的冲击力。
40.如图1所示,机后舱和无人机电机线和延长线相连,以便于之后无人机驱动电机14的替换,同时固定有用于放置铁块的配重位,用于选择性搭载铁块,起着配平无人机重心的作用;该机舱安全性最高,也可装载电子设备。
41.如图1所示,机体1尾部的下木板113上连接有螺旋桨13以及电机座,电机座上固定有驱动电机14,驱动电机14为无刷电机并驱动螺旋桨13转动。
42.控制系统部分:
43.如图4所示,机前舱内安装有飞行控制器,飞行控制器简称飞控,是无人机的“大脑”,通过提前设定程序,可以自主调整飞机姿态,遇到突发事情时无需操作者远程遥控,便可自行处理。本实施例中,其采用f405 wing飞行控制器,飞行控制器处理器为168mhz stm32f405芯片,支持32位运算,反应快、精度高;
44.该飞行控制器可高度集成气压计、电压电流计、陀螺仪、加速度计、osd模块、降压模块等,具有体积小、重量轻、安全可靠的特点;该飞行控制器本身为开源飞行控制器,可以为使用者提供更多个性化设定以及附加功能。
45.其中,气压计用于测量此时大气压强,从而获得飞机高度信息,其选用bmp280;
46.电压计、电流计分别用于检测无人机的电压和电流,数据通过无线图传和osd显示在地面端屏幕上;
47.惯性测量单元(inertial measurement unit,简称imu)是测量物体三轴姿态角
(或角速率)以及加速度的装置,陀螺仪及加速度计是imu的主要元件,其精度直接影响到惯性系统的精度。该无人机imu选用mpu6000,这款加速度计性能良好,价格低廉,足够一般无人机使用;
48.osd模块在无人机领域是指视频叠加系统,用于将飞行器的状态(即各个模块的数据,例如风速仪、高度仪、陀螺仪、电量监控等),整合到osd模块,然后osd模块把监控的数据返回到终端(遥控器的显示屏上),并叠加到图传的图像上,其型号选用inav osd w。
49.如图4所示,飞行控制器还连接于gps,gps用于定位无人机所在位置,结合惯性测量单元可推算无人机的横滚角、俯仰角、坐标值等飞行参数;且通过设定可以为飞机提供一键返航、规划航线等功能,本实施例中gps选用neo-m8n,搜星能力良好,精度较高,一般可定位12至22颗星。
50.如图4所示,飞行控制器连接于信号转换器,信号转换器另一端连接于电子继电器,信号转换器用于将飞行控制器发出的pwm信号转化为电子继电器可识别的模拟电压信号,电子继电器分别用于控制光伏板与两锂电池充电保护板的通与断、两锂电池与飞行控制器的通与断,以控制一锂电池用于供电的同时,光伏板对另一锂电池进行充电。
51.如图4所示,飞行控制器还连接于运动摄像头和可调焦高清镜头;机头正前方有边长1.5cm的正方形孔洞,内嵌圆形镜头运动相机,用于观察飞行路线,机体1底部配置用于观察监视目标的可调焦高清镜头;
52.运动摄像头为fpv专用摄像头,是飞机的“眼睛”,不同于普通摄像头,它反应速度更快,延迟更低,通过图像发射端发射,接收端接受,操控者可以远程了解实时信息、对目标的观察以及飞机的操纵;考虑到模拟图传的信号干扰和损失,本实施例选择运动摄像头为qav250,该摄像头水平清晰度700线,输入电压12v。
53.可调焦高清镜头用于搜寻或观察地面目标,选用大疆mavic 2pro 2zoom云台相机。
54.如图4所示,飞行控制器还连接于图传发射端和无线电接收端;
55.无线电接收端用于接收操纵者发出的信号,其选用2.4g传输,为jumper sf810接收机,协议为s-fhss,并采用s-bus总线与飞行控制器相连接;
56.图传发射端用于把实时图像信号转化为电磁波发射出去,根据国家安全规定选用ts353-400mw发射端,频段为5.8ghz,防止和遥控2.4ghz信号产生互相干扰;
57.除上述无人机携带电器还有地面站部分,其对应的包括2.4g遥控、5.8g的图形接收终端以及显示屏。
58.动力系统部分:
59.如图4所示,飞行控制器还连接于用于调整无刷电机转速的电子调速器,电子调速器是调整飞机动力输入的器件,通过接收端传来的电信号调整电压电流输入,输入信号到电机电调的要求是油门曲线要尽量顺滑、精度高、响应速度快;本实施例中,选用hobbywing skywalker 60a电调,以支持油门设定、低压报警等功能;电子调速器是支持7v~26v输入;
60.而电机是飞机的动力来源,工业电机分为有刷和无刷,有刷电机存在转速慢,电机效率低,碳刷磨损,寿命短等缺点,故本实施例中选用无刷电机,根据飞机尺寸和推力需求,选择型号4215电机;该电机kv值650,适用电压11v~26v,在电压14.8v时为每分钟13616转,适用12寸桨;考虑到无人机巡航大约50%油门,供电电压在14v~18v,采用14寸桨,最大推
力2400g;
61.本实施例中,飞行控制器还连接于位于机体1上的舵机,舵机用于控制副翼的角度,舵机选用es3054舵机,该舵机扭矩3.0/3.5kgf.cm,金属齿轮重20g。
62.上述重要电子设备包括飞行控制器、图传设备、大部分传感器都位于机腹部上方。
63.供电部分:
64.机前舱内安装有飞行控制器和两锂电池;其中一锂电池供电,光伏电池板发电、再经过整流器整流后给另一锂电池充电;
65.锂电池作为飞机起飞或紧急情况下主要动力来源,起飞后巡航时的补充能源,降落后作为太阳能发电板的储能装置。其采用5000mah的锂聚合物电池,放电倍率15c,标准电压14.8v,最大电压16.8v,最大持续放电电流20a,考虑到电池虚标问题,测得安全持续放电电流10a左右,共两块,基本满足飞行需求;
66.其光伏发电系统由光伏板和导线以及电源整流器组成,由两种成品半柔性光伏板组成,为两块50w光伏板22和两块20w光伏板21组成,共140w。
67.电源部分由两块锂电池和四块光伏发电板组成,当一号锂电池给无人机动力系统供电,二号锂电池接受光伏电池板发出电经过整流器整流后给电;
68.当正在给电机供电的锂电池低于安全使用电压14.8v时,电压计检测到电压低于14.8v,飞行控制器发出信号给电子继电器,电子继电器控制飞行控制器接通二号锂电池,并在30秒后断开一号锂电池,一号锂电池瞬间接通光伏板充电线路,光伏板给一号锂电池充电;如此重复,直到两节锂电池都低于15v,操作人员通过数据回传看到电池情况,选择合适地点降落。
69.本实施例中,该无人机在执行搜救任务时,一号二号锂电池提前充满电,一号锂电池给其供电;
70.当飞行20分钟时,无人机飞控发出信号给电子继电器接通二号锂电池,30秒后断开一号锂电池,这时无人机动力系统完全由二号锂电池供电;一号锂电池接通光伏板,光伏板通过太阳能发电给该锂电池充电;
71.当无人机切换后再飞行20分钟,重复刚刚操作供电由一号锂电池负责,二号锂电池充电;
72.当两块电池电量都小于30%,不再自动切换,通过遥控器手动切换,并提醒操作员选择地点降落更换锂电池,降落后,太阳能电池板持续给无人机充电,当一块电池电量高于60%。便可再次起飞。
73.该无人机用光伏板空中给蓄电池充电的方式,提高了续航时间和巡航半径,在野外搜查中,相比较于传统无人机,增长了200%的工作时间,150%的工作效率,能够更持久更高效得对失踪人员进行搜救,且减少了50%所必需的工作人数和60%后勤补给设备,在人力有限的情况下,可以组成更多搜救队去搜救受困伤员,同时减少搜救成本。同时该无人机有着较好的载重能力,可以根据不同任务更换必要设备,用途广泛。
74.本实施例在现有无人机研发的基础上,放弃常规固定翼布局,采用更高飞行效率的飞翼布局,在同体积下提高30%~50%载重能力。该无人机拥有更好的气动特性,采用后掠翼,减小风阻提高巡航速度,选用两种翼型组成混合翼,提高2
°
的失速临界迎角,相比于普通机翼2在该特制机翼2上表面可搭载多30%半柔性单晶光伏板,达到机翼2面积69%,光
伏板给两个锂电池轮流充电,锂电池再轮流为无人机供电,这两个过程同时进行,减轻了天气对太阳能无人机的制约,相比较市面无人机延长了130%续航时间,增加了120%巡航半径。机翼与机身直接融合,内部有六根高强度碳纤维杆框架,结构强度高,在紧急情况无动力状态下能够较平稳滑行、降落。
75.以装载10000ma
·
h的锂电池无人机为例:
[0076][0077]
经济上:
[0078]
该无人机的基础制作材料有复合板,epp板、ps发泡板、碳纤维支撑杆、单晶光伏板。材料低廉,一架空无人机载机造价2000元。基础电子设备和动力设备、蓄电池总造价5000元。相比于一般工业无人机造价低15%。相比于其他无人机,该无人机执行任务需要更换的电池少1.5倍,节省了所需锂电池的费用。
[0079]
以一条长200km的河流进行无人机搜查,一般无人机需要分5次完成。而该无人机只需要3次,大大提高了工作效率,减小了后勤工作强度。
[0080]
以上所述,仅是本实用新型的较佳实施例而已,不用于限制本实用新型,本领域技术人员可以在本实用新型的实质和保护范围内,对本实用新型做出各种修改或等同替换,这种修改或等同替换也应视为落在本实用新型技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1