一种新型三段式滚扑翼飞行器的制作方法
本发明涉及扑翼飞行,尤其涉及一种新型三段式滚扑翼飞行器。
背景技术:
1、与固定翼和旋翼飞行器相比,扑翼飞行器的主要特点是将升降,悬停和推进功能集于一身,依靠扑翼的运动方式,快速有效地改变扑翼飞行器的姿态,具有较强的机动性和灵活性。扑翼飞行器的扑动可以使机身在水平位置锁定,并且扑翼所产生的升力效率高,能够利用较少的能量实现长距离飞行。此外,还可以利用势能在高空进行翱翔。这些特点将使得扑翼飞行器更易于长时间,远距离,无能源补充条件下飞行。
2、在扑翼飞行器的研究领域,一般采用翅膀多段式结构设计,该结构考虑鸟类翅膀的折叠变形和扭转的姿态,对于鸟类飞行过程还原程度高,但结构复杂,在高频扑动的情况下结构容易损坏。再者,扑翼飞行器通常采用多电机协同驱动,这种方式不仅结构复杂,驱动控制困难,并且占用空间比较大,使得传动机构的尺寸较大,为扑翼飞行器的轻量化带来较大困难。
3、扑翼飞行器在扑动过程中,分为向上扑动和向下扑动两个部分,根据空气动力学原理,向下扑动过程是升力产生的主要来源,向上扑动主要给扑翼飞行带来阻力,这就造成扑翼飞行器飞行时升力不够的问题,飞行器无法达到飞行的能力。
技术实现思路
1、为了拓展上述扑翼飞行器飞行方式的技术领域,本发明提供了一种新型三段式滚扑翼飞行器。
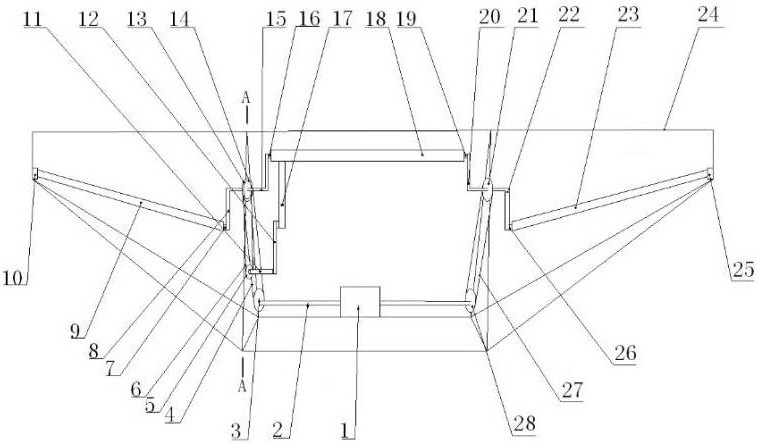
2、技术方案:一种新型三段式滚扑翼飞行器,它由电机,传动轴,第一链轮,第一链条,第二链轮,第二链条,第三链轮,第四链轮,第一连杆,第一轴承,第二连杆,第三连杆,链转轴,主翼,第二轴承,第四连杆,第五链轮,第五连杆,右翼,第六链轮,第六连杆,左翼,第一调心轴,第一十字轴,第二调心轴,第二十字轴,框架,第三链条组成。第一连杆和第一轴承,第四链轮是一体的;第四连杆和第二轴承,第五链轮是一体的;第五连杆和第二调心轴,第五链轮是一体的;第六连杆和第一调心轴,第三链轮是一体的;链转轴和第二链轮是一体的。框架底座上设置的电机,传动轴与电机连接,传动轴上设置第一链轮和第六链轮,第一链条连接第四链轮,第三链条连接第五链轮,第四链轮左侧连接第三链轮;左翼左侧通过第一十字轴连接到框架上,左翼右侧通过第一调心轴连接第三链轮上设置的第六连杆;主翼左侧通过第一轴承连接第一连杆,主翼右侧通过第二轴承连接第四连杆,主翼左下方设置第二连杆,第二连杆通过第三连杆连接第二链轮上设置的链转轴,第二链轮通过第二链条连接第三链轮,右翼右侧通过第二十字轴连接到框架上,左侧通过第二调心轴连接第五链轮上设置的第五连杆。主翼是水平状态下的上下旋转扑动,左右翼利用连杆和十字轴的同步运动,与水平面形成的倾斜角度相同;机翼填充百叶窗样式铺设的叶片。机翼运动时,主翼上扑,左右翼下扑。
3、本发明专利的目的在于提供一种新型三段式滚扑翼飞行器。相比申请号为202021060498.8的专利扑翼型仿生飞行器,申请号为 202210132608.4的专利发明优化了动力源,申请号为202210041519.9的专利优化了机翼结构。 本发明结合了旋转飞行器的旋转运动和扑翼飞行器的上下运动,提出一种新的飞行器飞行方式。
4、与现有技术相比,本发明的有益效果是:
5、1.本发明三段式滚扑翼结构设计,结构简单,容易操作,可以适应的工作场地更加广泛,制造简单,成本低廉,容易普及。
6、2.本发明的机翼升力主要来自机翼自身的扑动,更加安全。即使飞行器失去动力,也可以通过机翼把降落时的动能转化为升力实现无动力飞行,安全着陆。
7、3.本发明通过调整机翼的倾斜可以控制飞行器实现空中悬停、向前、向后飞行。
8、4.本发明机翼由百叶窗方式填充叶片,在上扑上旋过程中,叶片与迎风方向平行,减小阻力的产生,下扑下旋过程中,叶片与迎风方向垂直,增大升力。
9、5.本发明结合了旋翼和扑翼的优点,驱动更加简单,不同与传统机翼运动方式,创造出将扑翼飞行和旋翼飞行相结合的旋转扑翼飞行方式。普及以后可以减少能源消耗和地面拥堵,以及碳排放。
技术特征:
1.一种新型三段式滚扑翼飞行器,它由电机(1),传动轴(2),第一链轮(3),第一链条(4),第二链轮(5),第二链条(6),第三链轮(13),第四链轮(14),第一连杆(15),第一轴承(16),第二连杆(17),第三连杆(12),链转轴(11),主翼(18),第二轴承(19),第四连杆(20),第五链轮(21),第五连杆(22),右翼(23),第六链轮(28),第六连杆(8),左翼(9),第一调心轴(7),第一十字轴(10),第二调心轴(26),第二十字轴(25),框架(24),第三链条(27)组成,其特征是:所述第一连杆(15)和第一轴承(16),第四链轮(14)是一体的;所述第四连杆(20)和第二轴承(19),第五链轮(21)是一体的;所述第五连杆(22)和第二调心轴(26),第五链轮(21)是一体的;所述第六连杆(8)和第一调心轴(7),第三链轮(13)是一体的;所述链转轴(11)和第二链轮(5)是一体的;框架(24)底座上设置的电机(1),传动轴(2)与电机(1)连接,传动轴(2)上设置第一链轮(3)和第六链轮(28),第一链条(4)连接第四链轮(14),第三链条(27)连接第五链轮(21),第四链轮(14)左侧连接第三链轮(13);左翼(9)左侧通过第一十字轴(10)连接到框架(24)上,左翼(9)右侧通过第一调心轴(7)连接第三链轮(13)上设置的第六连杆(8);主翼(18)左侧通过第一轴承(16)连接第一连杆(15),主翼(18)右侧通过第二轴承(19)连接第四连杆(20),主翼(18)左下方设置第二连杆(17),第二连杆(17)通过第三连杆(12)连接第二链轮(5)上设置的链转轴(11),第二链轮(5)通过第二链条(6)连接第三链轮(13),右翼(23)右侧通过第二十字轴(25)连接到框架(24)上,右翼(23)左侧通过第二调心轴(26)连接第五链轮(21)上设置的第五连杆(22)。
技术总结
本发明公开了一种新型三段式滚扑翼飞行器,涉及扑翼飞行器领域,包括框架,机翼和电机。所述框架上设置有链轮和调心轴,传输动力,固定机翼;左右翼设置在框架两侧,通过调心轴和连杆的连接成末塌固定,主翼下方有两个连杆连接到链转轴上,所述链转轴设置在一个可以摇摆的链轮上,链轮与框架上固定的链轮连接,当主翼和左右翼交替滚动运动时,可以让主翼保持水平;框架底座上设置电机,电机的传动轴左右两端连接框架上的链轮,为链轮提供动力,带动机翼运动。本发明左右翼末塌固定与主翼交替滚动扑翼的结构,动力损耗少、重量轻、节省高强度材料,三段式滚扑翼设计可以让飞行器垂直起降,在空中悬停、前进、后退、转向。
技术研发人员:李志强
受保护的技术使用者:李志强
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!