一种卫星剩磁在轨标定方法与流程
1.本发明涉及航天器控制技术领域,尤其涉及一种卫星剩磁在轨标定方法。
背景技术:
2.磁强计是以地球磁场为基准,测量卫星姿态最常用的敏感器,因具有价格低廉、质量轻、体积小、采样电路简单、性能稳定等优点,在卫星中得到广泛应用。为了降低卫星本体扰动磁场对磁强计测量值的影响,卫星通常将磁强计通过长杆伸出到卫星外部,由于磁场强度与磁体距离的三次方呈反比,因此增加距离可以降低磁场强度,从而提高磁强计的测量精度。但是微纳卫星由于收到体积、质量的限制,通常只能将磁强计安装在微纳卫星的星体内部,与其他部组件之间的距离较近。因此,当星体内的其他组件工作产生磁场时,会严重影响磁强计的测量精度。当磁强计测量的地磁场与真实磁场存在较大偏差,基于该测量值计算的卫星姿态精度较低。进一步地,对于微纳卫星体积很小,且卫星在低轨飞行,所受到的环境干扰主要是由剩磁引起的,因此如何对整星剩磁进行标定,利用磁力矩器对剩磁量进行在轨补偿,进而提高姿态控制精度也是需要解决的问题。
技术实现要素:
3.本发明针对上述问题,提供了一种卫星剩磁在轨标定方法,利用陀螺和三轴磁强计在轨测量得到的数据,通过递推最小二乘估计对整星剩磁进行标定,便于利用磁力矩器对剩磁量进行在轨补偿,进而提高姿态控制精度。
4.本发明的一种卫星剩磁在轨标定方法,包括以下步骤:
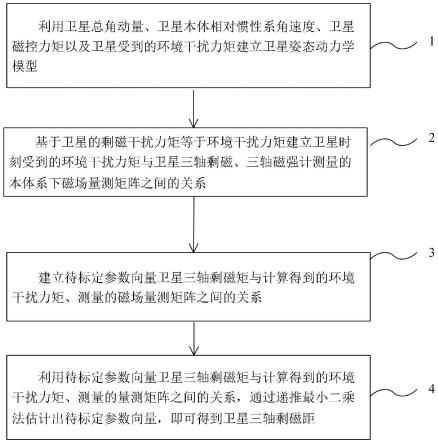
5.步骤1、利用卫星总角动量、卫星本体相对惯性系角速度、卫星磁控力矩以及卫星受到的环境干扰力矩建立卫星姿态动力学模型;
6.步骤2、基于卫星的剩磁干扰力矩等于环境干扰力矩建立卫星t1时刻受到的环境干扰力矩与卫星三轴剩磁、t1时刻三轴磁强计测量的本体系下磁场量测矩阵之间的关系;
7.步骤3、建立待标定参数向量卫星三轴剩磁矩与第i次计算得到的环境干扰力矩、第i次测量的磁场量测矩阵之间的关系;
8.步骤4、利用待标定参数向量卫星三轴剩磁矩与第i次计算得到的环境干扰力矩、第i次测量的量测矩阵之间的关系,通过递推最小二乘法估计出待标定参数向量,即可得到卫星三轴剩磁距。
9.本发明的进一步技术方案为:随着测量次数的增加,在估计出待标定参数向量相对稳定后通过计算一段时间内待标定参数向量的标准差用于评估估计的稳定性。
10.本发明的进一步技术方案为:通过计算待标定参数向量估计值与实际剩磁矩之间的偏差占比确定估计值的准确性。
11.本发明的进一步技术方案为:所述卫星姿态动力学模型为:其中,h为卫星总角动量,等于卫星本体角动量hb和飞轮角动量h
wb
之和,ω
bi
为卫星本体相对惯
性系角速度,tm为卫星磁控力矩,td为卫星受到的环境干扰力矩。
12.本发明的进一步技术方案为:步骤2中基于卫星的剩磁干扰力矩等于环境干扰力矩建立卫星t1时刻受到的环境干扰力矩与卫星三轴剩磁、t1时刻三轴磁强计测量的本体系下磁场量测矩阵之间的关系,具体表达式为:td(t1)=mb×bb
(t1),其中td(t1)为卫星t1时刻受到的环境干扰力矩,mb为卫星三轴剩磁矩,bb(t1)为t1时刻三轴磁强计测量得到的本体系下磁场量测矩阵。
13.本发明的进一步技术方案为:步骤3中建立待标定参数向量卫星三轴剩磁矩与第i次计算得到的环境干扰力矩、第i次测量的磁场量测矩阵之间的关系,具体表达式为:zi=hix,其中,zi表示第i次计算得到的环境干扰力矩,hi为第i次测量的磁场量测矩阵,x表示待标定参数向量卫星三轴剩磁矩。
14.本发明的进一步技术方案为:所述递推最小二乘估计过程为:
[0015][0016]
其中,表示待标定参数向量初始估计值,表示待标定参数向量第k+1次估计值,i3为3
×
3单位矩阵,z
k+1
表示第k+1次计算得到的环境干扰力矩,h
k+1
表示第k+1次测量的磁场量测矩阵。
[0017]
本发明提供的一种卫星剩磁在轨标定方法,其产生的有益效果有:相对于现有技术,将卫星受到的剩磁力矩近似等于环境干扰力矩,再利用三轴磁强计测量的磁场数据,反算出整星剩磁,便于后续利用磁力矩器对剩磁量进行在轨补偿,进而提高姿态控制精度。
附图说明
[0018]
图1是本发明实施例中卫星剩磁在轨标定方法流程图。
具体实施方式
[0019]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅出示了与本发明相关的部分而非全部。
[0020]
在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各步骤描述成顺序的处理,但是其中的许多步骤可以被并行地、并发地或者同时实施。此外,各步骤的顺序可以被重新安排。当其操作完成时所述处理可以被终止,但是还可以具有未包括在附图中的附加步骤。所述处理可以对应于方法、函数、规程、子例程、子程序等等。
[0021]
本发明实施例针对一种卫星剩磁在轨标定方法,方法利用陀螺确定的卫星本体相对惯性系角速度,通过刚体卫星姿态动力学方程反算出卫星所受到的空间环境干扰力矩,由于卫星体积很小,且卫星在低轨飞行,所受到的环境干扰主要是由剩磁引起的,因此将卫
星受到的剩磁力矩近似等于总环境干扰力矩,再利用三轴磁强计测量的磁场数据,可以反算出整星剩磁。参见图1,包括以下步骤:
[0022]
步骤1、利用卫星总角动量、卫星本体相对惯性系角速度、卫星磁控力矩以及卫星受到的环境干扰力矩建立卫星姿态动力学模型;
[0023]
刚体卫星的姿态动力学方程即所述卫星姿态动力学模型为:其中,h为卫星总角动量,等于卫星本体角动量hb和飞轮角动量h
wb
之和,ω
bi
为卫星本体相对惯性系角速度,tm为卫星磁控力矩,td为卫星受到的环境干扰力矩。
[0024]
具体地,卫星本体角动量hb=jω
bi
,式中j为卫星转动惯量矩阵,飞轮总角动量为:
[0025][0026]
式中,c
mw
为飞轮的安装矩阵,jw为飞轮转动惯量,ω
wx
、ω
wy
、ω
wz
和ω
ws
分别为飞轮x、y、z和s的转速,其中x、y、z和s表示飞轮的编号,卫星配置4个飞轮,对于三正交加一斜装的构型方案,飞轮x、y和z代表正交安装的飞轮,飞轮s代表斜装的飞轮;对于其它构型方案,飞轮s表示第4个飞轮。
[0027]
卫星总角动量变化率可由角动量差分近似得到
[0028][0029]
卫星姿态动力学方程变为
[0030]
(jω
bi
(t2)+h
wb
(t2))-(jω
bi
(t1)+h
wb
(t1))+ω
bi
×
(jω
bi
(t1)+h
wb
(t1))≈tm(t1)+td(t1)
[0031]
因此有
[0032]
td(t1)=(jω
bi
(t2)+h
wb
(t2))-(jω
bi
(t1)+h
wb
(t1))+ω
bi
×
(jω
bi
(t1)+h
wb
(t1))-tm(t1)。
[0033]
步骤2、基于卫星的剩磁干扰力矩等于环境干扰力矩建立卫星t1时刻受到的环境干扰力矩与卫星三轴剩磁、t1时刻三轴磁强计测量的本体系下磁场量测矩阵之间的关系;
[0034]
卫星受到的剩磁干扰力矩近似等于总环境干扰力矩,具体表达式为:td(t1)=mb×bb
(t1),其中td(t1)为卫星t1时刻受到的环境干扰力矩,mb为卫星三轴剩磁矩,bb(t1)为t1时刻三轴磁强计测量得到的本体系下磁场量测矩阵。
[0035]
具体地,设td(t1)=[t
dx t
dy t
dz
]
t
,bb(t1)=[b
bx b
by b
bz
]
t
,mb=[m
bx m
by m
bz
]
t
,则有
[0036][0037]
防止进行递推最小二乘估计时发生奇异,左侧和右侧分别乘以同一较大正数p,优选为1
×
105,则有
[0038]
[0039][0040]
步骤3、建立待标定参数向量卫星三轴剩磁矩与第i次计算得到的环境干扰力矩、第i次测量的磁场量测矩阵之间的关系;
[0041]
具体地,x=mb=[m
bx m
by m
bz
]
t
为代标定的参数向量,第i次量测方程,具体表达式为:zi=hix,其中,zi表示第i次计算得到的环境干扰力矩,hi为第i次测量的磁场量测矩阵,x表示待标定参数向量卫星三轴剩磁矩。
[0042]
其中,
[0043]
步骤4、利用待标定参数向量卫星三轴剩磁矩与第i次计算得到的环境干扰力矩、第i次测量的量测矩阵之间的关系,通过递推最小二乘法估计出待标定参数向量,即可得到卫星三轴剩磁距。
[0044]
具体地,递推最小二乘估计过程为:
[0045][0046]
其中,表示待标定参数向量初始估计值,表示待标定参数向量第k+1次估计值,i3为3
×
3单位矩阵,z
k+1
表示第k+1次计算得到的环境干扰力矩,h
k+1
表示第k+1次测量的磁场量测矩阵。
[0047]
进一步地,随着测量次数的增加,在估计出待标定参数向量相对稳定后通过计算一段时间内待标定参数向量的标准差用于评估估计的稳定性。
[0048]
进一步地,通过计算待标定参数向量估计值与实际剩磁矩之间的偏差占比确定估计值的准确性。
[0049]
具体实施过程中,由步骤1至步骤4可得到x在任意时刻的最小二乘估计,随着量测次数的增加,初值影响逐渐消失,估计值逐渐趋于稳定而逼近被估计值。只要有量测数据,可以继续进行计算,没有量测数据时则暂停计算。相对稳定后通过计算一段时间内x的标准差可以评估估计的稳定性。本估计方法获得的次数越多,修正的次数也越多,估计的精度也越高。
[0050]
基于上述实施例的仿真实验
[0051]
卫星质量为13kg,运行在轨道高度为500km降交点地方时为10:30am的太阳同步轨道上,卫星对地三轴稳定,三轴剩磁假设为[0.1 0.1 0.1]
t
am2。三轴磁强计的测量误差[80 80 80]nt,零偏取值为[400
ꢀ‑
300 500]nt;mems陀螺常值漂移[5
ꢀ‑
5 5
ꢀ‑
5]
°
/h,零偏稳定性为[10
ꢀ‑
15 15
ꢀ‑
10]
°
/h;卫星转动惯量偏差10%。仿真中同时考虑了剩磁干扰力矩、气动干扰力矩、太阳光压力矩和重力梯度力矩。
[0052]
计算运行2000s时,本方法计算所得的三轴剩磁矩与实际剩磁矩[0.1 0.1 0.1]
t
am2的偏差降到3%以下,趋于稳定。运行8000s后,x轴剩磁最大偏差值为0.0016am2,偏差占比1.6%(偏差除以实际剩磁矩),y轴剩磁最大偏差为0.0023am2,偏差占比2.3%,z轴剩磁最大偏差为0.0022am2,偏差占比2.2%,可认为估计值已经稳定,估计精度为2.3%。
[0053]
综合上述实施例提供的一种卫星剩磁在轨标定方法,其产生的有益效果有:相对于现有技术,将卫星受到的剩磁力矩近似等于环境干扰力矩,再利用三轴磁强计测量的磁场数据,反算出整星剩磁,便于后续利用磁力矩器对剩磁量进行在轨补偿,进而提高姿态控制精度。
[0054]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1