一种高超声速流动控制结构
1.本技术涉及高超声速飞行器技术领域,特别地,涉及一种高超声速流动控制结构。
背景技术:
2.高超声速飞行器表面边界层流动的分离往往会导致阻力增加,分离引起的非定常运动也可能会引起高极值热流载荷和脉动压力载荷,给飞行器的结构和飞行安全带来严重后果。为了延迟或消除高超声速飞行器表面边界层流动的分离,需采取一定的方式对流动进行控制。
3.传统的流动控制方法包含主动和被动控制两类,主动控制一般包括壁面加热/冷却、边界层抽吸、声学激发、射流、等离子体等方式,被动控制一般包括通气壁、流动鼓包、涡流发生器、合成射流等方式。在众多的流动控制方法当中,涡流发生器由于其出色的鲁棒性和控制的有效性受到了最多的青睐,但是一方面,涡流发生器的特征高度通常和边界层的厚度在同一个量级,其对主流的阻挡效应会带来很高的附加阻力,另一方面,当马赫数升至超声速以上时,涡流发生器对流动分离的控制效率会大幅度降低。这是因为涡流发生器诱导产生的反向旋转涡对在高超声速边界层中会很快衰退。因而,对于高超声速飞行器的发展需要一种新的控制方法来同时满足以下两方面要求:(1)在高超声速条件下能有效延迟或者消除流动分离;(2)用于高超声速流动控制的结构产生尽可能少的附加阻力。
技术实现要素:
4.本技术提供了一种高超声速流动控制结构,以解决现有的涡流发生器附加阻力很高、马赫数升至超声速以上时控制效率会大幅度降低的技术问题。
5.本技术采用的技术方案如下:
6.一种高超声速流动控制结构,包括:
7.平行设置的若干小肋单元阵列结构,所述小肋单元阵列结构的特征高度小于0.1δ,δ为边界层厚度,每个小肋单元阵列结构的中心沿长度方向设置有与试验流动方向平行的发散线,每个小肋单元阵列结构的表面在所述发散线长度方向的两侧均对称地设置有若干相互平行且与所述试验流动方向成设定夹角的微沟槽结构,相邻小肋单元阵列结构之间设置有形成与试验流动方向平行的汇聚槽。
8.进一步地,每个所述小肋单元阵列结构的宽度w=1δ~3δ,其中,δ为边界层厚度。
9.进一步地,每个所述小肋单元阵列结构的长度l=3δ~9δ,其中,δ为边界层厚度。
10.进一步地,所述小肋单元阵列结构的总厚度为小于0.2δ。
11.进一步地,所述微沟槽结构与所述试验流动方向的设定夹角α=30
°
~60
°
。
12.进一步地,所述微沟槽结构的横截面为梯形,且沟槽深度h=0.02δ~0.1δ,沟槽宽度s=1.5h。
13.进一步地,所述微沟槽结构的横截面为三角形,且沟槽深度h=0.02~0.1δ,沟槽宽度s=h。
14.进一步地,所述微沟槽结构的横截面为矩形,且沟槽深度h=0.02δ~0.1δ,沟槽宽度s=h。
15.进一步地,位于所述发散线两侧的微沟槽结构的间距g=1.5h,h为微沟槽结构的沟槽深度。
16.进一步地,所述汇聚槽的宽度为2h~3h,h为微沟槽结构的沟槽深度。
17.相比现有技术,本技术具有以下有益效果:
18.本技术提供了一种高超声速流动控制结构,包括:平行设置的若干小肋单元阵列结构,所述小肋单元阵列结构的特征高度小于0.1δ,δ为边界层厚度,每个小肋单元阵列结构的中心沿长度方向设置有与试验流动方向平行的发散线,每个小肋单元阵列结构的表面在所述发散线长度方向的两侧均对称地设置有若干相互平行且与所述试验流动方向成设定夹角的微沟槽结构,相邻小肋单元阵列结构之间设置有形成与试验流动方向平行的汇聚槽。本实施例提供的高超声速流动控制结构的特征高度远远小于边界层厚度,在高超声速流动条件下带来的附加阻力基本可以忽略;本实施例的高超声速流动控制结构的结构简单、可靠性高,并且不需要外界能量输入,节能减耗成本低;本实施例的高超声速流动控制结构可以有效延迟或消除高超声速飞行器表面边界层流动的分离,此设计填补国内空白。
19.除了上面所描述的目的、特征和优点之外,本技术还有其它的目的、特征和优点。下面将参照附图,对本技术作进一步详细的说明。
附图说明
20.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
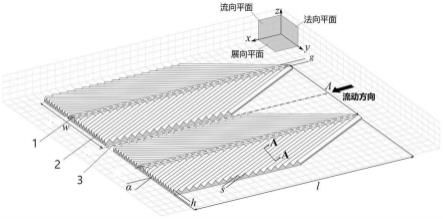
21.图1是本技术优选实施例的高超声速流动控制结构整体结构示意图。
22.图2是图1中a-a向剖视示意图。
23.图中所示:
24.1、发散线;2、微沟槽结构;3、汇聚槽。
具体实施方式
25.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
26.参照图1至图2,本技术的优选实施例提供了一种高超声速流动控制结构,包括:
27.平行设置的若干小肋单元阵列结构,所述小肋单元阵列结构的特征高度小于0.1δ,δ为边界层厚度,每个所述小肋单元阵列结构的中心沿长度方向设置有与试验流动方向平行的发散线1,每个小肋单元阵列结构的表面在所述发散线长度方向的两侧均对称地设置有若干相互平行且与所述试验流动方向成设定夹角的微沟槽结构2,相邻小肋单元阵列结构之间设置有形成与试验流动方向平行的汇聚槽3。
28.本实施例提供了一种高超声速流动控制结构,是一种仿鸟类羽毛的方向性表面微结构,包括:平行设置的若干小肋单元阵列结构,所述小肋单元阵列结构的特征高度小于0.1δ,δ为边界层厚度,每个小肋单元阵列结构的中心沿长度方向设置有与试验流动方向平行的发散线,每个小肋单元阵列结构的表面在所述发散线长度方向的两侧均对称地设置有
若干相互平行且与所述试验流动方向成设定夹角的微沟槽结构,相邻小肋单元阵列结构之间设置有形成与试验流动方向平行的汇聚槽。本实施例提供的高超声速流动控制结构的特征高度远远小于边界层厚度,在高超声速流动条件下带来的附加阻力基本可以忽略;本实施例的高超声速流动控制结构的结构简单、可靠性高,并且不需要外界能量输入,节能减耗成本低;本实施例的高超声速流动控制结构可以有效延迟或消除高超声速飞行器表面边界层流动的分离,从而填补国内空白。
29.具体地,本实施例的高超声速流动控制结构能在边界层内诱导产生大尺度涡旋结构的主要原因,来源于其表面汇聚-发散型的特殊沟槽结构对边界层內底部流动的导流作用:
30.在发散线1处,微沟槽结构2内部的流动会沿着沟槽方向流动,形成由发散线1指向两侧的横向流动速度,为了补充横向流动损失的质量,位于上层的边界层质量会被吸入边界层底层,形成垂直方向自上而下的流动速度;在汇聚槽3处,由于微沟槽结构2的导流作用形成了由两侧指向汇聚槽3的横向流动,汇聚后的流动由于溢流作用向位于上层的边界层运动,形成垂直方向自下而上的流动速度。发散线1上方和汇聚槽3上方相反方向的垂直流动共同形成一种流向旋转涡结构,现有的研究发现:流向旋转涡结构的尺寸主要取决于本实施例的高超声速流动控制结构的横向波长λ,与其特征高度h无相关关系,并且流向旋转涡结构会随流动方向发展演化。
31.本实施例的高超声速流动控制结构在边界层内诱导产生的流向旋转涡结构尺寸与高超声速边界层厚度处于同一量级,因而所述高超声速流动控制结构在高超声速条件下产生的流向旋转涡结构可以增强边界层与主流的能量掺混作用,提升边界层抵抗逆压梯度引起流动分离的能力。并且,本实施例的高超声速流动控制结构的特征高度h往往小于0.1δ,因而所产生的附加阻力基本上可以忽略。因此,高超声速流动控制结构可以在不明显增加流动阻力的条件下减小或消除高超声速流动中存在的边界层流动分离。
32.本实施例中的高超声速流动控制结构已经经过多次风洞试验测试验证,此新型流动控制结构稳定,方案可行,实现延迟或消除高超声速飞行器表面边界层流动分离,在壁面边界层流动控制试验研究中起到了关键作用,结果达到预期目标。
33.在本技术的优选实施例中,每个所述小肋单元阵列结构的宽度w=1δ~3δ,其中,δ为边界层厚度,实验发现,该装置在边界层诱导产生的流向旋转涡结构的展向尺寸与小肋单元阵列结构的宽度w基本保持一致,故为了让流向旋转涡结构在整个边界层产生能量交换,小肋单元阵列结构的宽度w应不小于边界层厚度,同时为了使流向旋转涡结构尽可能在流场中发展而不破碎,w通常不大于3倍边界厚度。
34.在本技术的优选实施例中,每个所述小肋单元阵列结构的长度l=3δ~9δ,其中,δ为边界层厚度。该控制结构诱导流向旋转涡结构的形成需要一段流向距离,实验发现3倍边界层厚度以上的流向距离足够诱导产生流向旋转涡结构,并且流动控制的效果随长度l的增加而增强,而9倍边界层厚度以上长度l则不再改变控制效果。
35.在本技术的优选实施例中,所述小肋单元阵列结构的总厚度为小于0.2δ,这样设置的原因和好处是将流动控制结构控制在边界层发展的低速底层,边界层流动控制效果好,并且不会对主流流场产生影响。
36.在本技术的优选实施例中,所述微沟槽结构与所述试验流动方向的设定夹角α=
30
°
~60
°
,微沟槽结构与试验流动方向的夹角对边界层具有导流作用,能产生横向的二次流动,进而在整个边界层诱导产生流向旋转涡结构,导流作用的形成需要该夹角α大于30
°
,同时为了尽可能不增加控制结构额外产生的阻力,夹角需要控制在60
°
以下。
37.在本技术的优选实施例中,所述微沟槽结构的横截面为梯形,且沟槽深度h=0.02δ~0.1δ,沟槽宽度s=1.5h,本实施例中,所述微沟槽结构的横截面为梯形,设置梯形的好处是边界层由底层向法向方向发展时存在速度梯度,设置梯形对应的流道呈现为由小到大,正好满足速度变化,流动控制效果最好;同时为了尽可能减小该结构在高超声速流场中产生的波阻,其深度不宜超过边界层厚度的10%,但是实验效果会随着沟槽深度h的减小而降低,故h不应小于边界层厚度的2%。
38.在本技术的优选实施例中,所述微沟槽结构的横截面为三角形,且沟槽深度h=0.02~0.1δ,沟槽宽度s=h,设置三角形的好处是结构简单,加工成本低。
39.在本技术的优选实施例中,所述微沟槽结构的横截面为矩形,且沟槽深度h=0.02δ~0.1δ,沟槽宽度s=h,设置矩形槽的好处是建构简单,容易实现。
40.在本技术的优选实施例中,位于所述发散线两侧的微沟槽结构的间距g=1.5h,其与沟槽宽度s保持一致,其好处是可以更好的改善高超声速边界层的速度剖面特性,达到表面边界层流动控制的目的。
41.在本技术的优选实施例中,所述汇聚槽的宽度为2h~3h,从而提供足够容积汇集由两侧的微沟槽结构2流入的横向流动,便于汇聚后的流动由于溢流作用向位于上层的边界层运动,形成垂直方向自下而上的流动速度。
42.上述实施例已经经过风洞试验测试验证,方案可行,结果达到预期目标。
43.综上所述,本技术提供的高超声速流动控制结构可以在壁面边界层中产生反向旋转的流向涡对,从而改善高超声速边界层的速度剖面特性,提高边界层抗分离的能力,达到延迟或消除高超声速飞行器表面边界层流动分离的目的,有利于开展壁面边界层流动控制试验研究,促进相关技术工程实践应用。
44.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1