一种便于快速拆装的多旋翼无人机多轴机架的制作方法
本技术涉及无人机,尤其涉及一种便于快速拆装的多旋翼无人机多轴机架。
背景技术:
1、无人驾驶飞机,简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。
2、现有技术中,如中国专利公开号cn214493323u,公开了一种便于快速拆装的多旋翼无人机多轴机架,它包括机架主体,所述机架主体的表面固定连接有连接座,所述连接座的内壁滑动连接有连接杆,所述机架主体的底部固定连接有连接板,所述连接板的底部固定连接有支撑杆,所述连接座的顶部设置有螺栓,所述连接座的底部设置有螺帽。该实用新型通过连接板、连接杆、连接座和固定座之间的配合,可以有效地对机架上各部件进行快速拆装,从而使得在对其进行维修更换的时候,更加轻松方便,从而保证了无人机正常的使用,避免了因更换不及时,从而造成不必要的麻烦,同时,在对其可以进行拆装,也方便对其进行存放时减少存放空间。
3、上述专利中的多旋翼无人机多轴机架通过设置螺栓与螺帽和连接板、连接杆、连接座和固定座之间的配合起到了可以有效地对机架上各部件进行快速拆装的效果,但是在野外复杂情况下多旋翼无人机进行工作时,由于操作技术不过硬,机桨是最容易撞击到障碍物的,从而导致机桨损坏,影响到飞行平衡,需要及时进行更换机桨,现有无人机机架中的机桨通常采用固定螺栓安装的,拆装时需要使用螺丝刀对多个螺栓进行拆卸,导致拆装速度缓慢,因此,针对上述问题,我们提出一种新型的一种便于快速拆装的多旋翼无人机多轴机架。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在野外复杂情况下多旋翼无人机进行工作时,由于操作技术不过硬,机桨是最容易撞击到障碍物的,从而导致机桨损坏,影响到飞行平衡,需要及时进行更换机桨,现有无人机机架中的机桨通常采用固定螺栓安装的,拆装时需要使用螺丝刀对多个螺栓进行拆卸,导致拆装速度缓慢的问题,而提出的一种便于快速拆装的多旋翼无人机多轴机架。
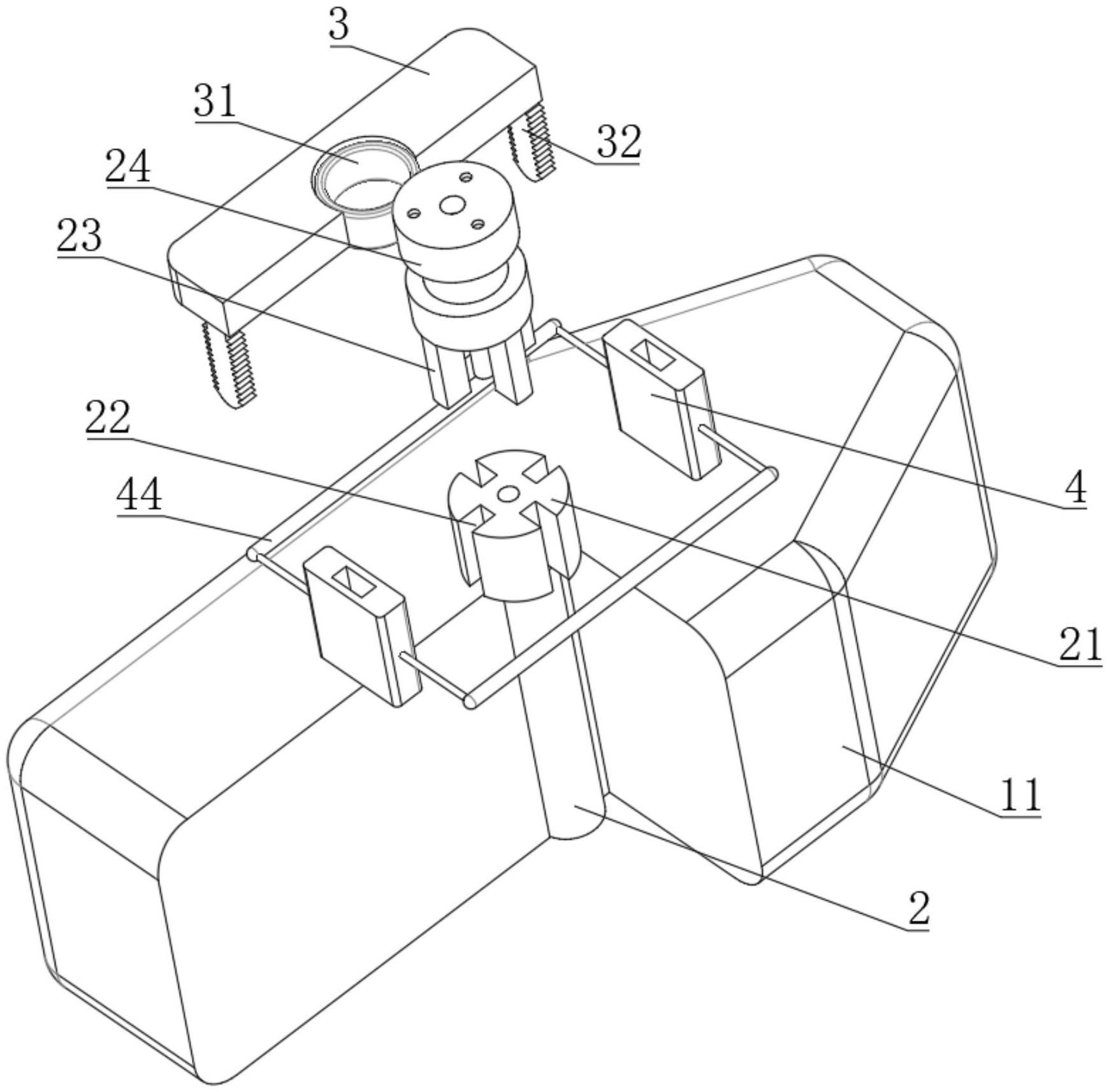
2、为了实现上述目的,本实用新型采用了如下技术方案:一种便于快速拆装的多旋翼无人机多轴机架,包括连接轴杆和连接块,所述连接轴杆的端面固定连接有安装块,所述安装块的顶部对称固定连接有连接座,所述连接座的内部对称设置有棘爪,所述棘爪的外表面固定连接有连杆,所述棘爪的外表面固定连接有弹簧,所述连杆的端面与相邻连杆的端面之间固定连接有拉杆,所述连接块的底部对称固定连接有棘条,所述连接块的内部设置有轴承,所述轴承的内表面之间转动连接有机桨座,所述机桨座的顶部固定安装有机桨叶,所述机桨座的底部固定连接有限位块。
3、优选的,所述弹簧的位置与连杆的位置呈对应设置,所述弹簧的端面与连接座的内表面呈固定连接。
4、优选的,所述棘条的位置与连接座的位置相对应,所述棘条的外表面与棘爪的外表面呈啮合设置。
5、优选的,所述安装块的底部固定连接有电机座,所述电机座的内底部固定安装有驱动电机。
6、优选的,所述驱动电机输出端固定连接有机桨轴,所述机桨轴的外表面滑动贯穿安装块的外表面并延伸至上方。
7、优选的,所述机桨轴的顶部固定连接有对接块,所述对接块的顶部开设有多个限位槽,所述限位槽与限位块呈对应设置。
8、与现有技术相比,本实用新型的优点和积极效果在于,
9、1、本实用新型中,通过拉动两个拉杆配合连杆带动棘爪向两侧移动,此时弹簧收缩,起到了使棘爪与棘条分离的作用,然后向上将连接块拔下,从而起到了快速拆卸机桨叶和机桨座的效果,安装新的机桨组件时,捏住连接块将棘条插入到连接座内部,棘条插入过程中,通过挤压棘爪带动弹簧收缩,插入完成后,弹簧通过挤压棘爪使其与棘条进行卡合,从而完成机桨组件的安装,方便快捷,起到了快速拆装多旋翼无人机机架中的机桨组件的效果。
10、2、本实用新型中,通过设置拉杆与将相邻的连杆进行连接,起到了方便使用的效果,机桨座底部的限位块通过与对接块顶部的限位槽相配合,起到了通过插合连接进行快速拆装的效果。
技术特征:
1.一种便于快速拆装的多旋翼无人机多轴机架,包括连接轴杆(1)和连接块(3),其特征在于:所述连接轴杆(1)的端面固定连接有安装块(11),所述安装块(11)的顶部对称固定连接有连接座(4),所述连接座(4)的内部对称设置有棘爪(41),所述棘爪(41)的外表面固定连接有连杆(42),所述棘爪(41)的外表面固定连接有弹簧(43),所述连杆(42)的端面与相邻连杆(42)的端面之间固定连接有拉杆(44),所述连接块(3)的底部对称固定连接有棘条(32),所述连接块(3)的内部设置有轴承(31),所述轴承(31)的内表面之间转动连接有机桨座(24),所述机桨座(24)的顶部固定安装有机桨叶(25),所述机桨座(24)的底部固定连接有限位块(23)。
2.根据权利要求1所述的便于快速拆装的多旋翼无人机多轴机架,其特征在于:所述弹簧(43)的位置与连杆(42)的位置呈对应设置,所述弹簧(43)的端面与连接座(4)的内表面呈固定连接。
3.根据权利要求1所述的便于快速拆装的多旋翼无人机多轴机架,其特征在于:所述棘条(32)的位置与连接座(4)的位置相对应,所述棘条(32)的外表面与棘爪(41)的外表面呈啮合设置。
4.根据权利要求1所述的便于快速拆装的多旋翼无人机多轴机架,其特征在于:所述安装块(11)的底部固定连接有电机座(12),所述电机座(12)的内底部固定安装有驱动电机(13)。
5.根据权利要求4所述的便于快速拆装的多旋翼无人机多轴机架,其特征在于:所述驱动电机(13)输出端固定连接有机桨轴(2),所述机桨轴(2)的外表面滑动贯穿安装块(11)的外表面并延伸至上方。
6.根据权利要求5所述的便于快速拆装的多旋翼无人机多轴机架,其特征在于:所述机桨轴(2)的顶部固定连接有对接块(21),所述对接块(21)的顶部开设有多个限位槽(22),所述限位槽(22)与限位块(23)呈对应设置。
技术总结
本技术提供一种便于快速拆装的多旋翼无人机多轴机架,涉及无人机技术领域,包括连接轴杆和连接块,所述连接轴杆的端面固定连接有安装块,所述安装块的顶部对称固定连接有连接座。本技术中,通过拉动两个拉杆配合连杆带动棘爪向两侧移动,此时弹簧收缩,起到了使棘爪与棘条分离的作用,然后向上将连接块拔下,从而起到了快速拆卸机桨叶和机桨座的效果,安装新的机桨组件时,捏住连接块将棘条插入到连接座内部,棘条插入过程中,通过挤压棘爪带动弹簧收缩,插入完成后,弹簧通过挤压棘爪使其与棘条进行卡合,从而完成机桨组件的安装,方便快捷,起到了快速拆装多旋翼无人机机架中的机桨组件的效果。
技术研发人员:何宝华,杨琪
受保护的技术使用者:江西酷飞模型开发有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!