航天器的轨道转移控制方法、装置、介质及航天器与流程
本技术涉及电路设计领域,特别是涉及一种基于全电推进器的航天器的轨道转移控制方法、装置、介质及航天器。
背景技术:
1、变轨最常用的星载发动机可以是固体发动机,一次点火工作完成变轨;也可以是液体火箭发动机,推力相比略小,分多次点火完成变轨。而电推进技术是一种利用电能加速推进工质从而实现高比冲的航天器推进技术。高比冲带来的低推进剂消耗可以在起飞重量不变的情况下提高有效载荷的承载能力,或在有效载荷一定的情况下增加推进剂的携带量从而提高卫星的服务寿命。
2、对于以电推进器作为星载发动机的卫星来说,一方面,变轨的历时要长得多;另一方面,电推进卫星对gnc系统(英文:guidance navigation control;中文:制导、导航与控制)要求非常高。轨道控制不同方向的耦合、姿态与轨道控制耦合、大量误差源的耦合等问题研究起来要比传统控制方案复杂得多。所以全电推进卫星轨道转移策略是世界性难题。
3、以通信卫星变轨为例。在发射成功之后,通信卫星要从近地点200公里转移到距离地球3.6万公里的地球静止轨道。在化学推进器的作用下,这一过程卫星只需要5次运行轨迹修正、历时7天左右时间就可以完成。而在电推进技术应用之后,卫星在变轨过程中姿态、运行轨迹需要进行不间断修正,直至变轨完成,在推力作用下,这一过程需要历时180天。
4、而针对改变半长轴和改变倾角的轨控目标,现有的轨控方案通常是分阶段实现各目标。以抬升半长轴为例,先在每圈的远地点附近,沿速度方向点火,保持倾角不变,维持近圆轨道,抬升半长轴至指定高度,然后在每圈的降交点和升交点附近点火,沿(正/负)法向点火,保持半长轴不变,改变倾角至指定值。
5、理论上,控制倾角和控制半长轴是解耦的,可以使用分阶段实现各个轨控目标的轨控策略,但在实际工程应用上对电推力器安装精度、姿态控制精度等的要求极高。如果以上误差(电推力器安装精度、姿态控制精度)造成的影响对于轨控目标来说是负面影响,例如改变倾角阶段的推力方向与卫星速度方向不垂直(偏航角不为90°),会使半长轴发生改变。
6、综上所述,由于上述影响,电推进器在实际工作时,实际的推力方向和理论的方向存在偏差,降低了轨控的效率。
技术实现思路
1、本技术的目的是提供一种基于全电推进器的航天器的轨道转移控制方法、装置、介质及航天器,以解决克服轨道转移过程中电推进器调整倾角时推力方向的误差对半长轴的耦合影响,以及采用斜向推力可以提高轨控的效率。
2、为解决上述技术问题,第一方面,本技术提供一种基于全电推进器的航天器的轨道转移控制方法,所述方法包括:
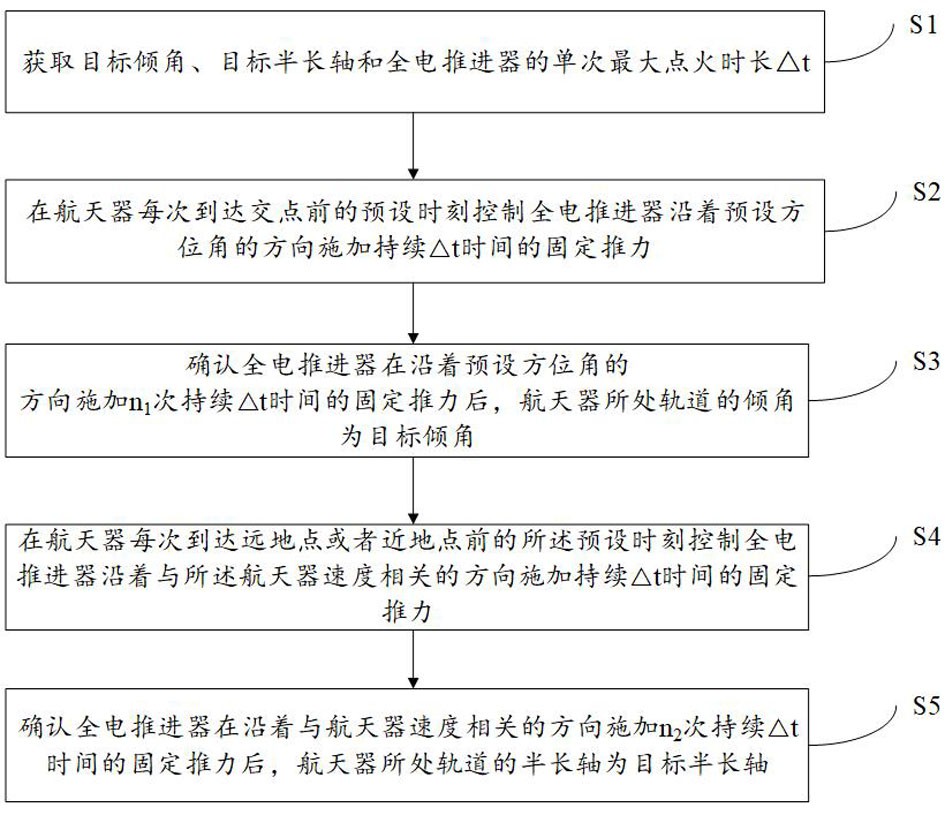
3、获取目标倾角、目标半长轴和全电推进器的单次最大点火时长;
4、在航天器每次到达交点前的预设时刻控制全电推进器沿着预设方位角的方向施加持续时间的固定推力,确认所述全电推进器在沿着所述预设方位角的方向施加n1次持续时间的所述固定推力后,所述航天器所处轨道的倾角为目标倾角;其中,所述预设时刻为;
5、在所述航天器每次到达远地点或者近地点前的所述预设时刻控制全电推进器沿着与所述航天器速度相关的方向施加持续时间的所述固定推力,确认所述全电推进器在沿着与所述航天器速度相关的方向施加n2次持续时间的所述固定推力后,所述航天器所处轨道的半长轴为目标半长轴;
6、其中,所述预设方位角的方向与误差调整系数k、以及相关;k为常数,且;为在调整半长轴时且保持倾角不变的情况下,在远地点或者近地点附近沿着与所述航天器速度相关的方向或者速度相关的反方向施加持续时间的所述固定推力的次数;为在调整倾角时且保持半长轴的情况下,在升交点和降交点沿着法向方向和负法向方向施加持续时间的所述固定推力的次数。
7、可选地,所述预设方位角的方向为vnc (velocity - normal - co-normal)坐标系下预设方位角的方向,所述预设方位角的方向包括第一预设方位角的方向和第二预设方位角方向;
8、所述在航天器每次到达交点前的预设时刻控制全电推进器沿着预设方位角的方向施加持续时间的固定推力,包括:
9、在航天器每次到达升交点前的预设时刻控制全电推进器沿着第一预设方位角的方向施加持续时间的固定推力;
10、在航天器每次到达降交点前的预设时刻控制全电推进器沿着第二预设方位角的方向施加持续时间的固定推力。
11、可选地,所述包括:
12、在增大倾角的轨控目标的情况下,在航天器每次到达升交点前的预设时刻控制全电推进器沿着方位角90°方向施加持续时间的固定推力的次数;以及在航天器每次到达降交点前的预设时刻控制全电推进器沿着方位角-90°方向施加持续时间的固定推力的次数;或者
13、在减小倾角的轨控目标的情况下,在航天器每次到达升交点前的预设时刻控制全电推进器沿着方位角-90°方向施加持续时间的固定推力的次数;以及在航天器每次到达降交点前的预设时刻控制全电推进器沿着方位角90°方向施加持续时间的固定推力的次数。
14、可选地,所述在所述航天器每次到达远地点或者近地点前的所述预设时刻控制全电推进器沿着与所述航天器速度相关的方向施加持续时间的所述固定推力,包括:
15、在增大半长轴的轨控目标的情况下,在所述航天器每次到达远地点前的所述预设时刻控制全电推进器沿着所述航天器速度的方向施加持续时间的所述固定推力;或者
16、在减小半长轴的轨控目标的情况下,在所述航天器每次到达近地点前的所述预设时刻控制全电推进器沿着所述航天器速度相反的方向施加持续时间的所述固定推力。
17、可选地,所述包括:
18、在抬升轨道高度的目标下,在增大半长轴时,在所述航天器每次到达远地点前的所述预设时刻控制全电推进器沿着所述航天器速度的方向施加持续时间的所述固定推力的次数;
19、或在降低轨道高度的目标下,在减小半长轴时,在所述航天器每次到达近地点前的所述预设时刻控制全电推进器沿着所述航天器速度相反的方向施加持续时间的所述固定推力的次数。
20、可选地,所述预设方位角为:
21、;
22、;
23、;
24、;
25、;
26、;
27、其中,为半长轴,δi是预设的倾角变化量,δi等于目标倾角减去航天器初始轨道的倾角,δa是预设的半长轴变化量,δa等于目标半长轴减去航天器初始轨道的半长轴。
28、第二方面,提供一种基于全电推进器的航天器的轨道转移控制装置。该装置包括:
29、获取模块,用于获取目标倾角、目标半长轴和全电推进器的单次最大点火时长;
30、第一控制模块,用于在航天器每次到达交点前的预设时刻控制全电推进器沿着预设方位角的方向施加持续时间的固定推力;其中,所述预设时刻为,为所述全电推进器的单次最大点火时间;
31、第一确认模块,用于确认所述全电推进器在沿着所述预设方位角的方向施加n1次持续时间的所述固定推力后,所述航天器所处轨道的倾角为目标倾角;
32、第二控制模块,用于在所述航天器每次到达远地点或者近地点前的所述预设时刻控制全电推进器沿着与所述航天器速度相关的方向施加持续时间的所述固定推力;
33、第二确认模块,用于确认所述全电推进器在沿着与所述航天器速度相关的方向施加n2次持续时间的所述固定推力后,所述航天器所处轨道的半长轴为目标半长轴;
34、其中,所述预设方位角的方向与误差调整系数k、以及相关;k为常数,且;为在调整半长轴时且保持倾角不变的情况下,在远地点或者近地点附近沿着与所述航天器速度相关的方向或者速度相关的反方向施加持续时间的所述固定推力的次数;为在调整倾角时且保持半长轴不变的情况下,在升交点和降交点沿着法向方向和负法向方向施加持续时间的所述固定推力的次数。
35、可选地,所述预设方位角的方向为vnc坐标系下预设方位角的方向,所述预设方位角的方向包括第一预设方位角的方向和第二预设方位角方向;
36、所述第一控制模块还用于:
37、在航天器每次到达升交点前的预设时刻控制全电推进器沿着第一预设方位角的方向施加持续时间的固定推力;
38、在航天器每次到达降交点前的预设时刻控制全电推进器沿着第二预设方位角的方向施加持续时间的固定推力。
39、第三方面,提供一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述第一方面任一项所述的方法。
40、第四方面,提供一种航天器,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述第一方面任一项所述的方法。
41、基于上述基于全电推进器的航天器的轨道转移控制方法,通过将误差调整系数融入固定推力方向的计算式中,得到更精确的固定推力方向,再基于更精确的固定推力方向调整航天器所处轨道的倾角,进而再调整航天器所处轨道的半长轴,可以减少控制次数,也就减少了点火次数,节省了燃料,克服了轨道转移过程中电推进器调整倾角时推力方向的误差对半长轴的耦合影响,以及采用斜向推力可以提高轨控的效率。
42、本技术提供的基于全电推进器的航天器的轨道转移控制装置、存储介质及航天器,与基于全电推进器的航天器的轨道转移控制方法属于同一发明构思,因此具有相同的有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!