一种机翼翼尖对接与分离装置
本发明涉及无人机、机械、力学领域,特别涉及无人机的机翼翼尖对接,具体是一种安装在翼尖,使两架及两架以上的无人机在空中实现翼尖对接与分离的装置。
背景技术:
1、单架无人机的展弦比越大,其升阻比也越大,从而能够提高无人机的巡航性能,达到高空长航时飞行的目的。但是随着机翼的展弦比的增大,单架无人机的加工成本与加工难度也大大增加,对起降场地的要求也更高。同时大展弦比无人机的气动弹性问题也更加突出,美国的“太阳神号”大展弦比无人机由于遭遇湍流,机翼产生颤振而解体。
2、近年来,提出了一种采用多架中小展弦比无人机从地面起飞,并在空中通过翼尖对接装置对接后形成大展弦比甚至超大展弦比无人机,在到达指定地点或者降落时翼尖分离的方案。此方案可有效规避加工成本、加工难度以及起降场地的问题。
3、作为可变体飞行器的重要发展方向之一,由多架小型固定翼无人机通过机翼柔性连接而成的组合式无人机,能够实现空中自由聚合与分离,兼具小型固定翼与高空长航时无人机的优势,可在未来军事以及民用领域发挥重要作用。多体无人机由多架无人机通过机翼翼尖对接装置联合在一起,现阶段的多体无人机在地面完成连接,并无法在空中完成对接。而军用领域两架飞机对接过程存在对接时间长、对接不稳定的问题,无法在实际应用中完成快速对接。
技术实现思路
1、本发明的目的在于提供一种机翼翼尖对接装置,为多体飞行器的对接与分离提供一种可靠有效的对接方案,以实现多体无人机在空中翼尖高效对接与分离,从而提高巡航效率以及完成各自子任务。
2、本发明针对无人机对接过程不稳定、对接时间长等问题,利用双稳态机构来实现对接过程快速、稳定、易用。双稳态机构是指在其运动过程中有两个稳定平衡状态,一个非稳定平衡状态的一类机构。本发明采用了一种双稳态机构,机构从一个稳定平衡状态向另一个平衡状态运动的过程中,环形永磁体对首先储存势能,然后释放势能,达到另一个平衡状态。对接装置处于两个稳定平衡状态时,不需要外力来维持即可稳定在限定的位置上。
3、本发明是这样实现的:
4、一种机翼翼尖对接与分离装置,其特征在于,所述的装置包括对接爪、永磁体作动器、对接球杆;永磁体作动器通过夹具固定于机翼翼尖,对接球杆通过碳纤维杆固定于另一架无人机机翼翼尖。对接爪与永磁体作动器通过螺纹连接在一起。
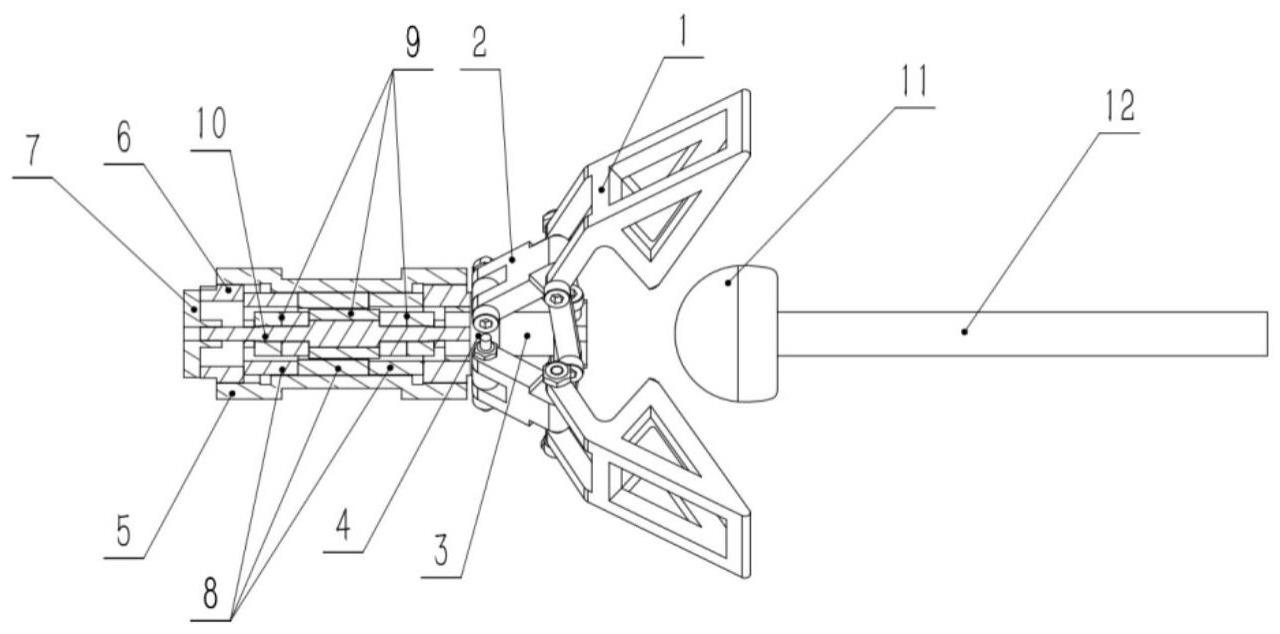
5、所述的对接爪包括对接识别杆(1)、连接杆(2)、对接盘(3)、中间连接件(4);通过单个对接识别杆(1)与对接盘(3)以及连接杆(2)分别铰接,所述的连接杆(2)以同样的方式与中间连接件(4)铰接,上述对接识别杆(1)、对接盘(3)、连接杆(2)以及中间连接件(4)组成了一个连杆机构;采用四个相同的连杆机构均匀布置于对接盘(3)与中间连接件(4)周围;
6、所述的永磁体作动器包括外环形永磁体固定件(5)、端部固定螺母(6)、限位器(7)、外环形永磁体(8)、内环形永磁体(9)、芯轴(10);永磁体作动器通过外环形永磁体固定件(5)、芯轴(10)分别与中间连接件(4)及对接盘(3)连接;内环形永磁体(9)安装于芯轴(11)上,通过螺母压紧固定,所述的外环形永磁体(9)安装于外环形永磁体固定件(5)内,并通过端部固定螺母压紧固定;所述的限位器(7)一端通过螺纹连接于芯轴(11)上,达到限制永磁体作动器行程的目的;永磁体作动器通过不同充磁方向的永磁体特定的排列形成一种双稳态结构;
7、所述的对接球杆包括相互连接的对接卡紧球(11)、机翼连接杆(12);所述的永磁体作动器通过夹具固定于无人机机翼翼尖,对接球杆通过机翼连接杆与另一无人机机翼翼尖相连。
8、进一步,所述的永磁体作动器与对接球杆分别固定安装在两架无人机的翼尖;所述的永磁体作动器作为双稳态机构通过螺纹固定于中间连接件(4)上,以及芯轴(10)与对接盘(3)也通过螺纹连接。
9、进一步,所述的限位器(7)在分离过程中通过在端部固定螺母(6)一侧移动至其端面停止,达到限位的作用。限位器一端通过螺纹连接于芯轴上,以达到限制永磁体作动器行程的目的,可通过调整限位器螺纹旋进的长度来调整对接球所需的施加的最小作用力。限位器另一端自由,可安装舵机等主动作动装置对限位器自由端施加主动力。
10、进一步,所述的外永磁体(8)与内永磁体(9)通过轴向与径向充磁的环形与瓦形永磁体特定的排列可提供较强的磁力进行作动。
11、进一步,所述的对接识别杆(1)一端为具有铰接孔的直杆,另一端为三角形或其他形状的大面积结构以达到易于同对接卡紧球(11)对接的目的,且此结构镂空以达到减重的目的。
12、进一步,所述的限位器(7)一端通过螺纹连接于芯轴上,在另一端离端面处可安装主动作动装置,通过对端面施加主动力,以达到机构分离的目的。
13、进一步,所述的对接卡紧球(11)与机翼连接杆(12)通过螺纹连接,并且可以根据实际对接的无人机翼尖尺寸来更换直径不同的连接杆。
14、一种机翼翼尖对接与分离装置,其特征在于,所述的装置的工作过程为:
15、两架无人机从地面起飞,通过控制使对接爪与对接球杆相互靠近,当对接卡紧球(11)与对接盘(3)接触时,两者产生作用力,对接开始;
16、在对接过程中,对接卡紧球(11)与对接盘(3)之间作用力使对接爪张开角度不断减小,内外永磁体中间位置处于对齐状态,轴向磁力为零,永磁体作动器达到最大势能点,对接分离装置处于不稳定点;对接卡紧球继续施加作用力于对接盘上,对接盘向左运动;
17、对接分离装置越过最大势能点,无需外力作用,对接盘(3)自动向左运动,对接爪快速收拢,将对接卡紧球(11)快速卡紧,实现两边机翼的翼尖快速对接;
18、永磁体作动器通过夹具固定于左边机翼翼尖,对接球杆上机翼连接杆(12)通过碳纤维杆固定于右边机翼翼尖,两机翼翼尖对接完成;
19、以对接开始状态对接球杆的位移为零,向左为位移正方向,永磁体作动器在对接过程中产生的轴向磁力;对接开始状态轴向磁力方向为右,向左移动过程中,轴向磁力大小逐渐减小,到达最大势能点时轴向磁力为零,越过最大势能点,轴向磁力反向,使得对接分离装置能够自动收紧。
20、本发明的有益效果为:本发明提出了一种新颖的机翼翼尖对接装置,此装置相对现在的机翼连接装置有以下的几个优点,首先,翼尖对接装置的对接爪在未对接状态前具有较大的张开面积,使用视觉识别方案进行对接识别更加容易,容错率高;其次,对接装置所采用的双稳态机构具有较快的对接速度;最后,对接完成后,永磁体作动器处于稳态,与对接爪连接产生一个较大且稳定抓紧力,使得两架无人机在飞行过程中处于稳定的连接状态。
技术特征:
1.一种机翼翼尖对接与分离装置,其特征在于,所述的装置包括对接爪、永磁体作动器、对接球杆;
2.根据权利要求1所述的一种机翼翼尖对接与分离装置,其特征在于,所述的永磁体作动器与对接球杆分别固定安装在两架无人机的翼尖;所述的永磁体作动器作为双稳态机构通过螺纹固定于中间连接件(4)上,以及芯轴(10)与对接盘(3)也通过螺纹连接。
3.根据权利要求1所述的一种机翼翼尖对接与分离装置,其特征在于,所述的限位器(7)在分离过程中通过在端部固定螺母(6)一侧移动至其端面停止,达到限位的作用。
4.根据权利要求1所述的一种机翼翼尖对接与分离装置,其特征在于,所述的外永磁体(8)与内永磁体(9)通过轴向与径向充磁的环形与瓦形永磁体特定的排列可提供较强的磁力进行作动。
5.根据权利要求1所述的一种机翼翼尖对接与分离装置,其特征在于,所述的对接识别杆(1)一端为具有铰接孔的直杆,另一端为三角形或其他形状的大面积结构以达到易于同对接卡紧球(11)对接的目的,且此结构镂空以达到减重的目的。
6.根据权利要求1所述的一种机翼翼尖对接与分离装置,其特征在于,所述的限位器(7)一端通过螺纹连接于芯轴上,在另一端离端面处可安装主动作动装置,通过对端面施加主动力,以达到机构分离的目的。
7.根据权利要求1所述的一种机翼翼尖对接与分离装置,其特征在于,所述的对接卡紧球(11)与机翼连接杆(12)通过螺纹连接,并且可以根据实际对接的无人机翼尖尺寸来更换直径不同的连接杆。
8.一种机翼翼尖对接与分离装置,其特征在于,所述的装置的工作过程为:
技术总结
本发明公开了一种机翼翼尖对接与分离装置,属于无人机、机械、力学领域,本发明在无人机翼尖使用碳纤维杆以及夹具安装该机构,其包括对接爪、永磁体作动器以及对接球杆。永磁体作动器通过夹具与无人机机翼翼尖连接,对接球杆通过机翼连接杆与另一无人机机翼翼尖相连。在翼尖对接过程中,对接球杆施加作用力于对接盘上,当越过最大势能位置后,对接爪快速收拢从而达到快速对接的目的。在限位器自由侧可安装舵机或其他主动作动装置,对限位器施加作用力使机构分离。本发明可实现无人机翼尖的快速对接,且能提供较大的抓紧力,提高翼尖连接的稳定性,同时能实现无人机之间的分离。
技术研发人员:蔡福建,赵永辉,刘豪杰,黄锐
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!