一种飞行器平衡调参试验台及其调参方法
本发明属于涡喷发动机飞行器试验、应用配套用具,具体为一种飞行器平衡调参试验台及其调参方法,用于涡喷发动机飞行器调试及测试。
背景技术:
1、近年来,随着航空科学技术的发展,涡喷发动机飞行器得到了越来越广泛的应用,与常规无人飞行器相比,涡喷发动机飞行器具有体积小、质量轻、成本低的优势,无论在军事领域还是民用领域,都有丰富的应用前景。
2、飞行控制是涡喷发动机飞行器的重要组成部分,其中pid控制测试、调试是无人飞行器研制的重要环节,pid控制是一种比较成熟的控制方法,算法相对简单、稳定性高且鲁棒性好,尤其在涡喷发动机飞行器起动过程中,pid控制是飞行器能够保持平稳的关键。
3、目前,涡喷发动机飞行器试验调试都是将飞行器固定在轴上使飞行器只能绕轴转动,或者将飞行器固定在万向节上进行试验,一定程度上限制了飞行器的运动;安装飞行器时无法改变涡喷发动机的相对位置,飞行器形状只能按默认规格;调试飞行器pid参数时必须关闭涡喷发动机,调试结束后继续试验;由于缺少安全防护装置,在飞控失灵或者有外来扰动的情况下,容易发生碰撞、跌落等事故,造成人员伤亡和财务损失,具有效率低、安全性不足等缺陷。
4、一种飞行器平衡调参试验台及调参方法需要满足以下需求:涡喷发动机相对位置可根据实际需要调整,或者可以通过试验方法优化涡喷发动机飞行器机架;减少试验时涡喷发动机飞行器受到的运动限制,同时保证在试验过程中不发生碰撞、跌落等事故;pid控制参数可在试验过程中调节,同时提供判断pid控制参数是否最优的依据;满足涡喷发动机飞行器飞行控制试验需求,要求试验台具有模块化结构、安装拆卸简单等特点。
技术实现思路
1、本发明针对飞行器调参试验缺乏相应试验台的问题,提出了一种飞行器平衡调参试验台及其调参方法,可以满足涡喷发动机飞行器调参试验涡喷发动机安装自由、飞行器运动不受限、安全防护、pid控制参数实时调整、pid控制参数优化判断等需求,实现了涡喷发动机飞行器pid参数调试及测试。
2、为实现上述目的,本发明采用如下技术方案:
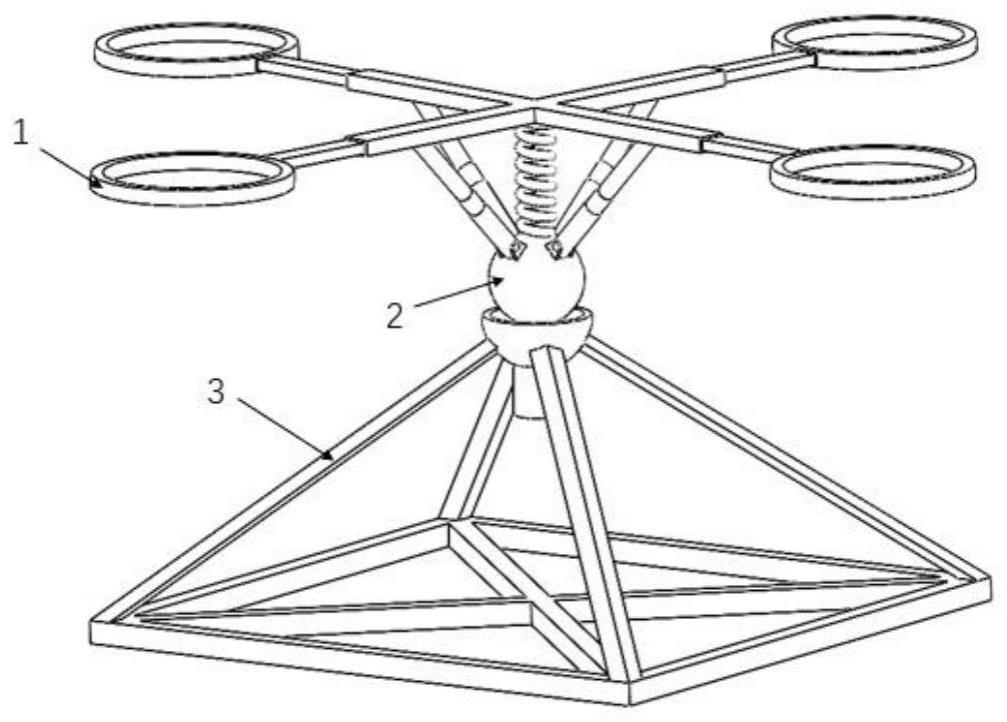
3、一种飞行器平衡调参试验台,包括上部涡喷发动机安装平台(1)、中部伸缩支撑及球形节点(2)、底部半球形支撑(3);
4、所述上部涡喷发动机安装平台(1)与中部伸缩支撑及球形节点(2)通过连接弹簧(2-7)弹性连接,通过液压伸缩杆(2-1)与支撑滑槽(1-4)滑动连接,中部伸缩支撑及球形节点(2)与底部半球形支撑(3)通过圆盘限位(2-6)与空心圆柱测力限位(3-2)滑动连接。
5、本技术方案进一步的优化,所述上部涡喷发动机安装平台(1)包括涡喷发动机安装环(1-1)、伸缩内杆(1-2)、伸缩外杆(1-3)和支撑滑槽(1-4);所述涡喷发动机安装环(1-1)与伸缩内杆(1-2)固定连接,伸缩内杆(1-2)可在伸缩外杆(1-3)内滑动,从而调整发动机安装环(1-1)的位置,达到测试所需的尺寸要求,伸缩外杆(1-3)与伸缩内杆(1-2)的相对位置可固定。
6、本技术方案进一步的优化,所述中部伸缩支撑及球形节点(2)包括液压伸缩杆(2-1)、液压伸缩杆外壳(2-2)、伸缩支撑旋转支座(2-3)、球形节点(2-4)、测力连杆(2-5)、圆盘限位(2-6)和连接弹簧(2-7);所述液压伸缩杆(2-1)可在液压伸缩杆外壳(2-2)内滑动,液压伸缩杆外壳(2-2)底部与伸缩支撑旋转支座(2-3)连接,液压伸缩杆外壳(2-2)可以伸缩支撑旋转支座开孔圆心为轴转动,液压伸缩杆(2-1)顶部可在支撑滑槽(1-4)内滑动但不脱离;支撑旋转支座(2-3)与球形节点(2-4)固定连接,球形节点(2-4)底部固定连接测力连杆(2-5),测力连杆底部固定连接圆盘限位(2-6),连接弹簧(2-7)下端固定连接于球形节点(2-4),上端固定连接于上部涡喷发动机安装平台(1)中心。
7、本技术方案进一步的优化,所述底部半球形支撑(3)包括半球形支座(3-1)、空心圆柱测力限位(3-2)、立面斜撑(3-3)和平面斜撑(3-4);所述平面斜撑(3-4)角部与立面斜撑(3-3)底部固定连接,立面斜撑(3-3)顶部与半球形支座(3-1)固定连接,半球形支座(3-1)内部为空腔,空腔直径与球形节点(2-4)直径相等;测力连杆(2-5)直径与通孔(3-1a)直径相等,测力连杆(2-5)沿通孔(3-1a)中心轴线穿入,圆盘限位(2-6)直径与空心圆柱测力限位(3-2)内径相等,限制中部伸缩支撑及球形节点(2)发生摆动,圆盘限位(2-6)可在空心圆柱测力限位(3-2)内部滑动,圆盘限位(2-6)上安装压力传感器,圆盘限位(2-6)与半球形支撑(3-1)之间沿测力连杆(2-5)设置圆柱压缩弹簧。
8、本技术方案进一步的优化,所述半球形支座(3-1)轴线处设置通孔(3-1a)。
9、一种飞行器平衡调参试验台调参方法,包括以下步骤:
10、s61、调节伸缩内杆(1-2)与伸缩外杆(1-3),改变涡喷发动机安装环(1-1)的位置,以适应不同尺寸的飞行器,调节完成后锁死伸缩内杆(1-2)与伸缩外杆(1-3),即伸缩内杆(1-2)与伸缩外杆(1-3)的相对位置固定;
11、s62、阶梯式涡喷发动机给油方式,每次给油改变量为涡喷发动机最大给油量的5%,给油量变化过程中液压伸缩杆(2-1)处于自由状态,即液压伸缩杆(2-1)与液压伸缩杆外壳(2-2)的相对位置可变,伸缩支撑旋转支座(2-3)角度可变,实时记录液压伸缩杆(2-1)长度及伸缩支撑旋转支座(2-3)角度,当液压伸缩杆(2-1)长度为最大长度10%~90%范围之外且伸缩支撑旋转支座(2-3)所处位置为最大角度10%~90%范围之外时,系统报警,同时输出此时总升力及各涡喷发动机推力,以供调试;
12、s63、上部涡喷发动机安装平台(1)稳定,由于四个涡喷发动机推力不同,出现俯仰角和滚转角,液压伸缩杆(2-1)处于锁死状态,即液压伸缩杆(2-1)与液压伸缩杆外壳(2-2)的相对位置固定,伸缩支撑旋转支座(2-3)角度固定;
13、s64、上部涡喷发动机安装平台(1)姿态判定,调节方式分为:
14、5)当伸缩支撑旋转支座(2-3)所处位置为最大角度10%~90%范围之外时,高于上部涡喷发动机安装平台(1)中心的液压伸缩杆(2-1)减小长度,低于上部涡喷发动机安装平台(1)中心的液压伸缩杆(2-1)增加长度;
15、6)当液压伸缩杆(2-1)长度为最大长度10%~90%范围之外时,高于上部涡喷发动机安装平台(1)中心的伸缩支撑旋转支座(2-3)向外侧转动,低于上部涡喷发动机安装平台(1)中心的伸缩支撑旋转支座(2-3)向内侧转动;
16、7)当伸缩支撑旋转支座(2-3)所处位置为最大角度10%~90%范围之内,且液压伸缩杆(2-1)长度为最大长度10%~90%范围之内时,高于上部涡喷发动机安装平台(1)中心的液压伸缩杆(2-1)减小长度,同时伸缩支撑旋转支座(2-3)向外侧转动,低于上部涡喷发动机安装平台(1)中心的液压伸缩杆(2-1)增加长度,同时伸缩支撑旋转支座(2-3)向内侧转动;
17、8)当伸缩支撑旋转支座(2-3)所处位置为最大角度10%~90%范围之外,且液压伸缩杆(2-1)长度为最大长度10%~90%范围之外时,系统报警,同时输出此时总升力及各涡喷发动机推力,以供调试;
18、s65、利用bp神经网络实时调整液压伸缩杆(2-1)长度控制pid控制器和伸缩支撑旋转支座(2-3)角度控制pid控制器的比例调节系数、微分调节系数和积分调节系数,使其能够自适应不同情况下的飞行器控制需求,调整过程中可以采用探索和利用的平衡策略,通过对不同参数组合的尝试和评估,逐步优化长度控制pid控制器和角度控制pid控制器的性能;
19、s66、姿态调整结束后释放液压伸缩杆(2-1),使其处于自由状态,提高涡喷发动机给油量,重复s62~s65,直到最大给油量;
20、s67、最大给油量姿态调整结束后试验结束,得到给油量与总升力、给油量与各涡喷发动机推力之间的关系,以及角度控制、长度控制pid控制器的比例调节系数、微分调节系数和积分调节系数,给油量与总升力、给油量与各涡喷发动机推力之间的关系可以判断角度控制、长度控制pid控制器参数是否为最优,角度控制、长度控制pid控制器的比例调节系数、微分调节系数和积分调节系数可计算得到涡喷发动机控制pid控制器的比例调节系数、微分调节系数和积分调节系数。
21、本技术方案进一步的优化,总升力、各涡喷发动机推力计算方法为:
22、无人机的位置运动方程为:
23、
24、其中,m表示无人机的质量,和[x y z]t分别表示无人机受到的合外力和四旋翼无人机的质心位置;
25、上部涡喷发动机安装平台(1)试验时,由受力分析可知,外力主要包括涡喷产生的升力和自身的重力,则上部涡喷发动机安装平台(1)受到的合外力fp为:
26、
27、其中,表示上部涡喷发动机安装平台(1)坐标系下的由涡喷发动机产生的升力,表示惯性坐标系下上部涡喷发动机安装平台(1)自身的重力,表示惯性坐标系下中部伸缩支撑及球形节点(2)通过液压伸缩杆(2-1)给上部涡喷发动机安装平台(1)的拉力,表示惯性坐标系下连接弹簧(2-7)给上部涡喷发动机安装平台(1)的拉力;
28、可描述为四个涡喷发动机产生的升力的叠加,则:
29、
30、上部涡喷发动机安装平台(1)自身的重力可描述为:
31、
32、其中mp表示上部涡喷发动机安装平台(1)的质量,g表示地球引力的重力系数;连接弹簧(2-7)给上部涡喷发动机安装平台(1)的拉力可描述为:
33、
34、其中ft表示连接弹簧(2-7)的弹性力;
35、经过调整,上部涡喷发动机安装平台(1)处于受力平衡状态,此时:
36、fp=0
37、基于上述分析可知,中部伸缩支撑及球形节点(2)给上部涡喷发动机安装平台(1)的拉力为:
38、
39、其中,θ、φ和ψ分别表示上部涡喷发动机安装平台(1)的俯仰角、滚转角和偏航角;表示四个涡喷发动机产生的合力;
40、球形节点(2-4)受到的竖向合外力为:
41、
42、其中,表示惯性坐标系下中部伸缩支撑及球形节点(2)自身的重力,表示惯性坐标系下圆盘限位(2-6)所受反力,中部伸缩支撑及球形节点(2)自身的重力可表示为:
43、
44、圆盘限位(2-6)所受反力为压力传感器的数值;
45、基于上述分析可知:
46、
47、其中,αi为伸缩外杆(1-3)与水平面的夹角,为单个伸缩内杆(1-2)给上部涡喷发动机安装平台(1)的拉力,则四个涡喷发动机产生的升力可描述为:
48、
49、对单根上部涡喷发动机安装平台(1)进行受力分析,可得:
50、
51、其中,mp为单根上部涡喷发动机安装平台(1)中部弯矩,di为上部涡喷发动机安装平台(1)中心到涡喷发动机安装环(1-1)中心的距离,βi为伸缩内杆(1-2)与上部涡喷发动机安装平台(1)平面的夹角,且βi=f(θ,φ,αi),为上部涡喷发动机安装平台(1)中心到液压伸缩杆(2-1)作用点的距离;
52、基于上述理论分析可知,各涡喷发动机推力可以被描述为:
53、
54、本技术方案进一步的优化,所述pid参数包括角度控制pid参数,长度控制pid
55、参数和涡喷发动机控制pid参数,角度控制输出量:
56、
57、其中,为角度比例调节系数,为角度积分调节系数,为角度微分调节系数;uα(k)为第k次的角度控制输出量,eα(k)为第k次计算的角度误差值,eα(j)为第j次计算的角度误差值,eα(k-1)为第k-1次计算的角度误差值;
58、长度控制输出量:
59、
60、其中,为长度比例调节系数,为长度积分调节系数,为长度微分调节系数;ul(k)为第k次的长度控制输出量,el(k)为第k次计算的长度误差值,el(j)为第j次计算的长度误差值,el(k-1)为第k-1次计算的长度误差值;
61、涡喷发动机控制输出量:
62、
63、其中,为涡喷发动机比例调节系数,为涡喷发动机积分调节系数,为涡喷发动机微分调节系数;ub(k)为第k次的涡喷发动机控制输出量,eb(k)为第k次计算的涡喷发动机误差值,eb(j)为第j次计算的长度误差值,eb(k-1)为第k-1次计算的涡喷发动机误差值;
64、当角度误差值eα比较小时,涡喷发动机误差值eb可表示为:
65、eb=r·(leα+el)
66、其中,r为系数,由上部涡喷发动机安装平台(1)中心到涡喷发动机安装环(1-1)中心的平均距离、上部涡喷发动机安装平台(1)中心到液压伸缩杆(2-1)作用点的平均距离决定,l为连接弹簧(2-7)的长度;
67、同理,涡喷发动机控制输出量ub(k)可表示为:
68、ub(k)=auα(k)+bul(k)
69、其中,a、b为系数;
70、基于上述理论分析可知,涡喷发动机比例调节系数涡喷发动机积分调节系数涡喷发动机微分调节系数可描述为:
71、
72、本技术方案进一步的优化,利用bp神经网络调整pid参数包括以下步骤:
73、s91、数据采集与预处理:采集飞行器平衡调参试验台输入和输出数据,并对数据进行预处理;
74、s92、bp神经网络模型设计与训练:建立bp神经网络模型,利用采集到的预处理数据,使用反向传播算法对bp神经网络进行训练;
75、s93、pid控制器设计:在bp神经网络的基础上,设计角度控制、长度控制pid控制器;
76、s94、实时控制与反馈调整:将训练好的bp神经网络和角度控制、长度控制pid控制器结合并应用于试验台系统中,通过实时采集传感器数据、计算控制信号并控制执行器,实现对试验台系统的实时控制以及角度控制、长度控制pid控制器参数的优化。
77、区别于现有技术,上述技术方案的有益效果是:
78、(1)本飞行器平衡调参试验台包括上部涡喷发动机安装平台、中部伸缩支撑及球形节点、底部半球形支撑,结构布局简单,可以克服现有试验台单次调参,多次试验的缺点;
79、(2)上部涡喷发动机安装平台通过伸缩内杆和伸缩外杆相对位置变化,调整四个涡喷发动机相对位置,以适应不同飞行器规格,在飞行器规格不确定的情况下,可以通过试验确定最优飞行器规格;
80、(3)中部伸缩支撑及球形节点与上部涡喷发动机安装平台始终保持连接,当试验发生大尺度倾斜时报警,防止发生倾覆,提高了试验台的安全性;
81、(4)通过改变液压伸缩杆的长度和角度,从而调整平台水平,避免直接调节涡喷发动机控制pid参数的繁杂操作,并且液压伸缩杆的长度控制pid参数和角度控制pid参数在试验过程中持续优化,调平过程中实时记录总升力及各涡喷发动机推力,提供pid参数是否最优的判断依据,实现了单次试验,多次调参;
82、(5)底部半球形支撑限制飞行高度,其构型设计确保试验台可以承受试验时的动力荷载,安全可靠;本发明为涡喷发动机飞行器在飞行控制调试测试尤其pid控制调试测试提供了技术支持。
- 还没有人留言评论。精彩留言会获得点赞!