一种用于航空机翼后缘的智能变形驱动装置的制作方法
本发明涉及航空智能结构领域,特别涉及一种用于航空机翼后缘的智能变形驱动装置。
背景技术:
1、航空机翼作为提供飞机升力的主要部件,其外形结构对飞行性能影响巨大。随着飞行速度和承载能力的不断提升,可根据特定飞行条件自适应光滑连续改变几何形状的航空机翼后缘成为了研究的热点。
2、近年来,针对机翼后缘连续光滑变形主要采用两种方式。其一,将智能材料用于机翼后缘,利用材料自身特性实现后缘变形。利用该方法设计的机翼结构简单且重量较轻,但智能材料变形响应慢且无法承受较大的气动载荷,难以匹配飞行要求。其二,采用单级驱动机构带动机翼后缘产生变形,该方式变形响应快,但变形幅度小,难以满足飞行需求。
3、针对上述方法的不足,设计了一种针对机翼后缘智能变形驱动装置,通过两级多连杆机构将电机输出扭矩放大以驱动机翼后缘发生目标变形,该驱动方式不仅能输出较大变形,同时有效提升后缘变形的实时性、稳定性。
技术实现思路
1、本发明的目的:设计一种针对航空机翼后缘智能变形驱动装置,装置采用电机驱动两级多连杆机构进而带动机翼后缘产生变形,该驱动方法不仅输出变形大且能保证变形的实时性和稳定性。
2、本申请的一种用于航空机翼后缘的智能变形驱动装置,包括固定在机翼后端并沿展向分布的至少两个驱动单元,每个驱动单元包括沿航向向后依次铰接的多级模块,每级模块的高度沿航向向后逐渐减小;所述模块包括安装在机翼桁架后端的固定模块组件,位于尾端的尾部活动模块,以及位于固定模块组件与尾部摆动模块之间的至少一级活动模块;
3、每级活动模块与其下一级活动模块之间连接多个连杆形成使下一级活动模块摆动的连杆机构,每级所述活动模块中部形成安装空间,所述安装空间中安装驱动连杆机构的动力装置;所述动力装置包括电源。
4、优选的是,活动模块包括依次铰接在固定模块组件后端的第一活动模块组件与第二活动模块组件,其中,动力装置包括安装在第一活动模块组件安装空间的第一级动力装置以及安装在第二活动模块组件安装空间的第二级动力装置;
5、连杆包括第一级连杆与第二级连杆,
6、多个第一级连杆铰接在第一活动模块组件与第二活动模块组件的侧面,第一活动模块组件、第二活动模块组件以及多个所述第一级连杆构成第一连杆机构,第一级动力装置驱动第一连杆机构使第二活动模块组件相对第一活动模块组件摆动;
7、多个第二级连杆铰接在第二活动模块组件与尾部摆动模块的侧面,第二活动模块组件、尾部摆动模块多个所述第二级连杆构成第二连杆机构,第二级动力装置驱动第二连杆机构使尾部摆动模块相对第二活动模块组件摆动。
8、优选的是,固定模块组件与第二活动模块组件之间铰接有长连杆,长连杆、固定模块组件、第一活动模块组件以及第二活动模块组件形成第三连杆机构。
9、优选的是,多个所述连杆包括摇臂、第一短杆、三角摇臂、第二短杆、连接臂以及第三短杆,其中,摇臂一端与驱动装置连接,另一端铰接第一短杆,三角摇臂一端铰接在活动模块上,另一端分别铰接第一短杆与第二短杆,摇臂、第一短杆、三角摇臂与活动模块形成第一平面四杆机构;
10、第二短杆另一端铰接连接臂,连接臂的中间铰接在活动模块上,连接臂另一端铰接第三短杆,三角摇臂、第二短杆、连接臂与活动模块形成第二平面四杆机构,
11、连接臂、活动模块、第三短杆、活动模块的下一级活动模块形成第三平面四杆机构。
12、优选的是,活动模块表面安装有蒙皮,相邻活动模块之间的蒙皮之间相互搭接。
13、优选的是,驱动单元之间的运动方式包括同步运动或者差动。
14、本申请的优点包括:
15、a)本发明采用两级动力装置同时驱动机翼后缘整体变形,变形幅度更大、承载能力更高;
16、b)采用电机作为动力源,机翼后缘实时变形更易控制、稳定性更好。
技术特征:
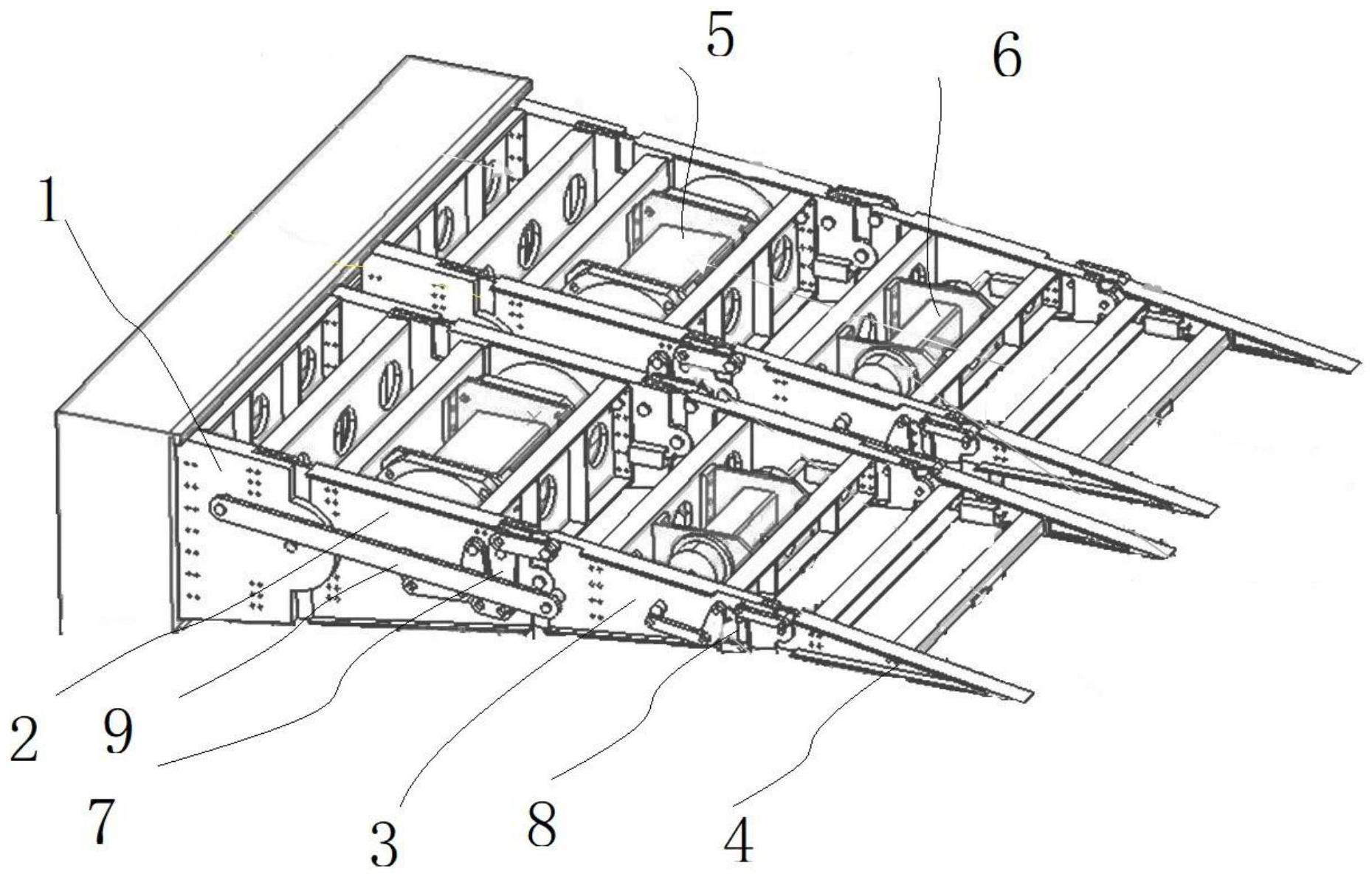
1.一种用于航空机翼后缘的智能变形驱动装置,其特征在于,包括固定在机翼后端并沿展向分布的至少两个驱动单元,每个驱动单元包括沿航向向后依次铰接的多级模块,每级模块的高度沿航向向后逐渐减小;所述模块包括安装在机翼桁架后端的固定模块组件(1),位于尾端的尾部活动模块(4),以及位于固定模块组件(1)与尾部摆动模块(4)之间的至少一级活动模块;
2.如权利要求1所述的用于航空机翼后缘的智能变形驱动装置,其特征在于,活动模块包括依次铰接在固定模块组件(1)后端的第一活动模块组件(2)与第二活动模块组件(3),其中,动力装置包括安装在第一活动模块组件(2)安装空间的第一级动力装置(5)以及安装在第二活动模块组件(3)安装空间的第二级动力装置(6);
3.如权利要求2所述的用于航空机翼后缘的智能变形驱动装置,其特征在于,固定模块组件(1)与第二活动模块组件(3)之间铰接有长连杆(9),长连杆(9)、固定模块组件(1)、第一活动模块组件(2)以及第二活动模块组件(3)形成第三连杆机构。
4.如权利要求1所述的用于航空机翼后缘的智能变形驱动装置,其特征在于,多个所述连杆包括摇臂(101)、第一短杆(102)、三角摇臂(103)、第二短杆(104)、连接臂(105)以及第三短杆(106),其中,摇臂(101)一端与驱动装置连接,另一端铰接第一短杆(102),三角摇臂(103)一端铰接在活动模块上,另一端分别铰接第一短杆(102)与第二短杆(104),摇臂(101)、第一短杆(103)、三角摇臂(103)与活动模块形成第一平面四杆机构;
5.如权利要求1所述的用于航空机翼后缘的智能变形驱动装置,其特征在于,活动模块表面安装有蒙皮,相邻活动模块之间的蒙皮之间相互搭接。
6.如权利要求1所述的用于航空机翼后缘的智能变形驱动装置,其特征在于,驱动单元之间的运动方式包括同步运动或者差动。
7.如权利要求1所述的用于航空机翼后缘的智能变形驱动装置,其特征在于,所述动力装置包括电源。
技术总结
本发明涉及航空智能结构领域,特别涉及一种用于航空机翼后缘的智能变形驱动装置,主要由固定模块组件、活动模块组件动力装置,连组成,通过第一级动力装置驱动5第一连杆机构7运转,从而带动第二活动模块3、第二活动模块3绕轴转动,同时借助第二级动力装置6驱动第二连杆机构8运转,用以带动尾部活动模块4绕轴转动。通过给定两级连杆偏转角和控制电机转速,以实现两级同步/异步启停的目标,同时借助两级动力装置驱动后,后缘机翼产生了更大的变形。
技术研发人员:许伟江,白钧生,王志刚,芦奕菲,王靖
受保护的技术使用者:中国飞机强度研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!