一种无人机着陆方法、装置、电子设备及存储介质与流程
本技术涉及无人机,具体涉及一种无人机着陆方法。本技术同时涉及无人机着陆装置、电子设备及计算机可读取存储介质。
背景技术:
1、无人机因其小巧灵活、智能自主等特点被广泛应用于民用和军事等领域中,在电力线路检测、大气环境检测、抢险救灾、侦察敌情、敌方目标跟踪、搜索战场情报等无人机的诸多任务类型中。对于无人机的着陆问题,现有的基于视觉slam的无人机着陆方法一般需要预设明显且鲁棒的标志物(例如h型着陆平台,三角着陆平台等),通过对不同图形的检测来实现无人机的精确着陆,使得无人机着陆的便利性受到影响。对于现有的基于gps的无人机着陆方法,由于gps信号易受到非空气介质的干扰和阻挡,例如,在阴暗、狭小、gps信号不稳定、电磁干扰强的场景中会造成误差增大甚至信号丢失等问题,使得无人机极易坠毁,无法满足无人机安全精确着陆的需求。
技术实现思路
1、本发明提供一种无人机着陆方法、无人机着陆装置、电子设备以及计算机可读取存储介质,以提高无人机着陆过程的便利性及准确性。
2、为了解决或部分解决上述技术问题,根据本发明的一方面,提供一种无人机着陆方法,该方法应用于无人机,包括:
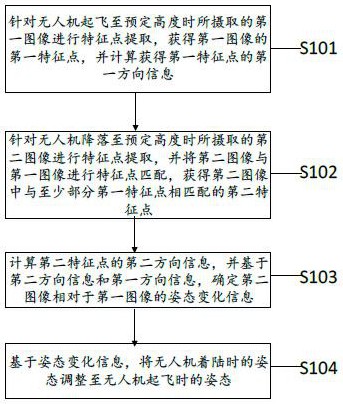
3、针对所述无人机起飞至预定高度时所摄取的第一图像进行特征点提取,获得所述第一图像的第一特征点;
4、计算获得所述第一特征点的第一方向信息;
5、针对所述无人机降落至所述预定高度时所摄取的第二图像进行特征点提取,并将所述第二图像与所述第一图像进行特征点匹配,获得所述第二图像中与至少部分所述第一特征点相匹配的第二特征点;
6、计算所述第二特征点的第二方向信息,并基于所述第二方向信息和所述第一方向信息,确定所述第二图像相对于所述第一图像的姿态变化信息;
7、基于所述姿态变化信息,将所述无人机着陆时的姿态调整至所述无人机起飞时的姿态。
8、在一种实施方式中,所述计算获得所述第一特征点的第一方向信息,包括:计算获得所述第一特征点相对于其图像块质心的第一方向信息;与所述图像块的质心坐标之间的第一方向信息;
9、所述计算所述第二特征点的第二方向信息,包括:计算获得所述第二特征点相对于其图像块质心的第二方向信息。
10、在一种实施方式中,所述计算获得所述第一特征点相对于其图像块质心的第一方向信息,包括:基于灰度质心法计算获得所述第一特征点的图像块的灰度质心,并获得所述第一特征点相对于其图像块的灰度质心的第一方向信息;
11、所述计算获得所述第二特征点相对于其图像块质心的第二方向信息,包括:基于灰度质心法计算获得所述第二特征点的图像块的灰度质心,并获得所述第一特征点相对于其图像块的灰度质心的第二方向信息。
12、在一种实施方式中,在针对所述无人机起飞至预定高度时所摄取的第一图像进行特征点提取之前,还包括:按照不同的缩放比例对所述第一图像进行缩放处理,获得不同缩放比例的多个第一图像;
13、所述针对所述无人机起飞至预定高度时所摄取的第一图像进行特征点提取,包括:对不同缩放比例的所述多个第一图像进行特征点提取,获得所述多个第一图像所包含的第一特征点;
14、所述将所述第二图像与所述第一图像进行特征点匹配,包括:将不同缩放比例的所述多个第一图像所包含的第一特征点与所述第二图像所提取的特征点进行匹配。
15、在一种实施方式中,在将所述第二图像与所述第一图像进行特征点匹配之后,还包括:
16、获得所述第二图像与所述第一图像之间的匹配特征点;
17、获得任一所述匹配特征点对应的邻居特征点,并基于所述邻居点获得相似邻居特征点;
18、基于所述相似邻居特征点的数量,确定所述匹配特征点是否匹配正确,若正确,则确定所述匹配特征点为所述第二特征点。
19、在一种实施方式中,所述第一图像为第一关键帧,所述方法还包括:基于无人机起飞至预定高度时所采集的图像序列确定所述第一关键帧;
20、在一种实施方式中,所述第二图像为第二关键帧,所述方法还包括:基于所述无人机降落至所述预定高度时所采集的图像序列确定所述第二关键帧。
21、根据本发明的另一方面,提供一种无人机着陆装置,该装置应用于无人机,所述装置包括:
22、第一特征点获得单元,用于针对所述无人机起飞至预定高度时所摄取的第一图像进行特征点提取,获得所述第一图像的第一特征点;
23、第一方向信息计算单元,用于计算获得所述第一特征点的第一方向信息;
24、第二特征点确定单元,用于针对所述无人机降落至所述预定高度时所摄取的第二图像进行特征点提取,并将所述第二图像与所述第一图像进行特征点匹配,获得所述第二图像中与至少部分所述第一特征点相匹配的第二特征点;
25、姿态变化信息确定单元,用于计算所述第二特征点的第二方向信息,并基于所述第二方向信息和所述第一方向信息,确定所述第二图像相对于所述第一图像的姿态变化信息;
26、姿态调整单元,用于基于所述姿态变化信息,将所述无人机着陆时的姿态调整至所述无人机起飞时的姿态。
27、根据本发明的另一方面,还提供一种电子设备,包括处理器和存储器;其中,所述存储器用于存储一条或多条计算机指令,其中,所述一条或多条计算机指令被所述处理器执行以实现上述方法。
28、根据本发明的另一方面,还提供一种计算机可读存储介质,其上存储有一条或多条计算机指令,该指令被处理器执行以实现上述方法。
29、与现有技术相比,本发明具有以下优点:
30、本发明提供的无人机着陆方法包括:针对无人机起飞至预定高度时所摄取的第一图像进行特征点提取,获得第一图像的第一特征点;计算获得第一特征点的第一方向信息;针对无人机降落至预定高度时所摄取的第二图像进行特征点提取,并将第二图像与第一图像进行特征点匹配,获得第二图像中与至少部分第一特征点相匹配的第二特征点;计算第二特征点的第二方向信息,并基于第二方向信息和第一方向信息,确定第二图像相对于第一图像的姿态变化信息;基于姿态变化信息,将无人机着陆时的姿态调整至无人机起飞时的姿态。该方法在无人机起飞至预定高度时记录第一图像的第一特征点的第一方向信息,并在着陆阶段无人机降落至上述预定高度时、获得第二图像的第二特征点(与至少部分第一特征点匹配)的第二方向信息,基于第一方向信息和第二方向信息即可确定第二图像相对于第一图像的姿态变化信息,并据此调整无人机着陆时的位姿,可实现无人机的精准高效着陆。相较于现有的基于视觉slam的无人机着陆方法,本方法无需预先在着陆点设置明显的并且鲁棒的标志物(h型着陆平台,三角着陆平台等),着陆便利性及实时性得以提升;相较于通过gps(全球定位系统)的定位和导航方法进行无人机着陆,本方法可以在狭小、电磁干扰强的环境下实现无人机精准着陆,无人机着陆实时性及便利性更强、着陆精度更高、且成本更低,并且本方法舍弃现有无人机系统的回环检测和图构建部分,减少了数据冗余,可提高数据处理速度。
- 还没有人留言评论。精彩留言会获得点赞!