一种扑翼飞行机器人起降装置和扑翼飞行机器人
本技术涉及扑翼飞行器,具体而言,涉及一种扑翼飞行机器人起降装置和扑翼飞行机器人。
背景技术:
1、扑翼飞行机器人是从仿生学角度采用翅翼的周期性扑动实现巡航、垂直飞行和悬停等飞行模态,其相对于固定翼和旋翼具有更高的飞行效率和机动性能。同时,扑翼飞行机器人的设计使其更容易适应一些特殊的应用场景,比如在紧凑空间中的救援任务、监测和勘察等领域。然而,在起降方面,现有技术中的大部分扑翼飞行机器人仍然采用操控者手抛和硬着陆的方式,这类方式极易造成扑翼飞行机器人的飞行不平稳,又容易造成扑翼飞行机器人零件的损坏,从而影响下一次飞行时的姿态。因此,亟需设计一种扑翼飞行机器人起降装置以解决前述问题。
技术实现思路
1、本技术提供一种扑翼飞行机器人起降装置和扑翼飞行机器人,以解决现有技术中扑翼飞行机器人起降不稳定,易造成飞行不平稳、零件损坏的问题。
2、具体的技术方案如下:
3、第一方面,本技术实施例提供了一种扑翼飞行机器人起降装置,应用于扑翼飞行机器人,包括:
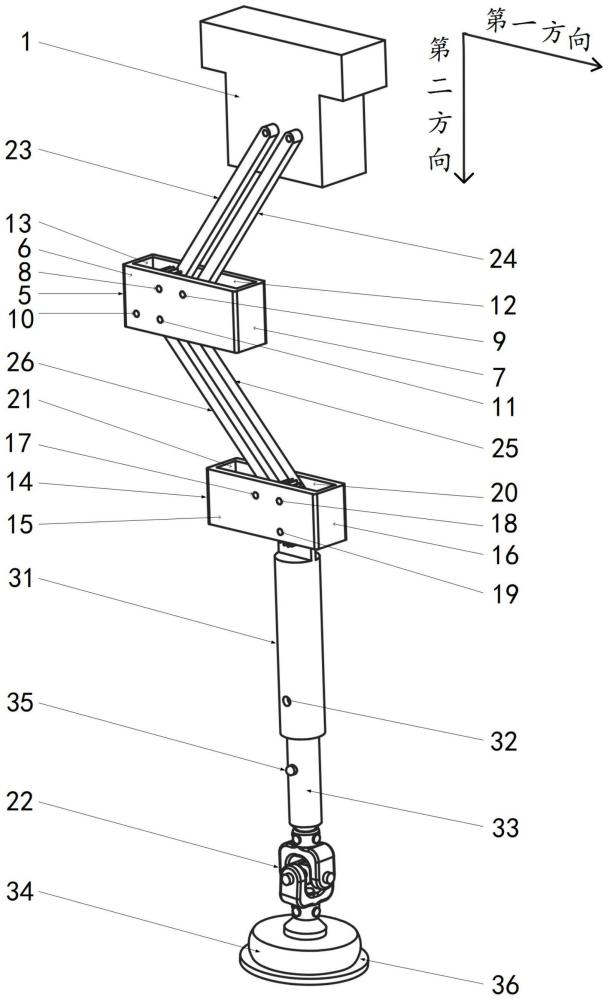
4、基座,所述基座设置有中空内腔,所述基座的一侧表面上设置第一孔和第二孔,所述第一孔、所述第二孔沿第一方向依次排列设置,且所述第一孔和所述第二孔均贯穿所述中空内腔内外,所述第二孔内转动连接有第一转轴;
5、微型直流无刷电机,所述微型直流无刷电机安装于所述中空内腔内,且所述微型直流无刷电机的电机轴穿设所述第一孔延伸至所述中空内腔外;
6、第一连接架,所述第一连接架的第一侧表面上设置有第三孔、第四孔、第五孔和第六孔,所述第三孔、所述第四孔和所述第五孔、所述第六孔沿第二方向分列设置,所述第三孔、所述第四孔沿所述第一方向依次排列设置,所述第五孔、所述第六孔沿所述第一方向依次排列设置,所述第三孔和所述第六孔在所述第二方向上位于同一直线上,且所述第三孔、所述第四孔、所述第五孔和所述第六孔均贯穿所述第一连接架的所述第一侧表面,所述第三孔内转动连接有第二转轴,所述第四孔内转动连接有第三转轴,所述第五孔内转动连接有第四转轴,所述第六孔内转动连接有第五转轴;
7、第二连接架,所述第二连接架的第五侧表面上设置有第七孔、第八孔和第九孔,所述第七孔、所述第八孔和所述第九孔沿所述第二方向分列设置,所述第七孔、所述第八孔沿所述第一方向依次排列设置,所述第八孔和所述第九孔在所述第二方向上位于同一直线上,且所述第七孔、所述第八孔和所述第九孔均贯穿所述第二连接架的所述第五侧表面,所述第七孔内转动连接有第六转轴,所述第八孔内转动连接有第七转轴,所述第九孔内转动连接有第八转轴;
8、第一摆杆,所述第一摆杆的一端与所述微型直流无刷电机的电机轴固定连接,所述第一摆杆的另一端与所述第二转轴固定连接;
9、第二摆杆,所述第二摆杆的一端与所述第一转轴固定连接,所述第二摆杆的另一端与所述第三转轴固定连接,所述第二摆杆与所述第一摆杆相平行;
10、第三摆杆,所述第三摆杆的一端与所述第五转轴固定连接,所述第三摆杆的另一端与所述第七转轴固定连接;
11、第四摆杆,所述第四摆杆的一端与所述第四转轴固定连接,所述第四摆杆的另一端与所述第六转轴固定连接,所述第四摆杆与所述第三摆杆相平行;
12、第一齿轮,所述第一齿轮设置于所述第二转轴上,且位于所述第一连接架与所述第一摆杆之间;
13、第二齿轮,所述第二齿轮设置于所述第五转轴上,且位于所述第一连接架与所述第三摆杆之间,所述第二齿轮与所述第一齿轮相啮合;
14、第三齿轮,所述第三齿轮设置于所述第七转轴上,且位于所述第二连接架与所述第三摆杆之间;
15、第四齿轮,所述第四齿轮设置于所述第八转轴上,所述第四齿轮与所述第三齿轮相啮合;
16、支撑柱外壳,所述支撑柱外壳为一端开口的壳体结构,所述支撑柱外壳的封闭端与所述第八转轴固定连接,所述第四齿轮位于所述第二连接架的所述第五侧表面与所述支撑柱外壳的封闭端之间,所述支撑柱外壳的侧表面上设置有固定孔,所述固定孔靠近所述支撑柱外壳的开口端设置;
17、支撑柱,所述支撑柱的一端通过所述支撑柱外壳的开口端插设于所述支撑柱外壳内,所述支撑柱的另一端设置有气垫;
18、弹簧,所述弹簧设置于所述支撑柱外壳内,且所述弹簧的一端与所述支撑柱外壳固定连接,所述弹簧的另一端与所述支撑柱的一端固定连接;
19、电控按钮,所述电控按钮设置于所述支撑柱的中部,且所述电控按钮的设置位置与所述固定孔的设置位置相对应,所述固定孔的形状大小与所述电控按钮的形状大小相匹配;
20、其中,第一方向为与地面相平行的方向,所述第二方向为与地面相垂直的方向。
21、在本技术的一些实施例中,还包括:
22、电磁铁,所述电磁铁设置于所述气垫远离所述支撑柱的一侧表面上。
23、在本技术的一些实施例中,所述微型直流无刷电机和所述电磁铁分别与所述扑翼飞行机器人的控制系统电连接,所述电控按钮与所述扑翼飞行机器人的控制系统无线通信连接;
24、所述扑翼飞行机器人起降装置在所述扑翼飞行机器人的飞行过程中处于折叠状态,当所述扑翼飞行机器人通过所述扑翼飞行机器人起降装置进行降落时,所述微型直流无刷电机接收扑翼飞行机器人的控制系统发送的降落控制电信号,并根据所述降落控制电信号启动,带动所述第一摆杆逆时针转动,所述第一摆杆带动所述第二转轴和所述第一齿轮同轴转动,所述第二齿轮与所述第一齿轮相啮合,所述第一齿轮带动所述第二齿轮转动,进而使所述第五转轴转动,所述第五转轴带动所述第三摆杆顺时针转动,所述第三摆杆使所述第七转轴和所述第三齿轮同轴转动,所述第四齿轮与所述第三齿轮相啮合,所述第三齿轮带动所述第四齿轮转动,进而使所述第八转轴转动,所述第八转轴带动所述支撑柱外壳以及所述支撑柱逆时针转动,直至支撑柱外壳以及所述支撑柱沿所述第二方向设置,所述扑翼飞行机器人的控制系统控制所述微型直流无刷电机停止运行,并控制所述电磁铁通电,所述扑翼飞行机器人通过所述电磁铁定位降落于铁质停机坪上,并通过所述支撑柱外壳内的所述弹簧和所述支撑柱上的所述气垫减震,所述扑翼飞行机器人停稳之后,所述扑翼飞行机器人的控制系统控制所述电磁铁断电,之后,所述电控按钮接收所述扑翼飞行机器人的控制系统发送的无线降落控制信号,根据所述无线降落控制信号,所述电控按钮缩进至所述支撑柱内,随后压缩所述支撑柱外壳内的所述弹簧,使所述支撑柱外壳上的所述固定孔与所述电控按钮对齐,所述电控按钮弹出至所述固定孔内;
25、当所述扑翼飞行机器人通过所述扑翼飞行机器人起降装置进行起飞时,所述电控按钮接收所述扑翼飞行机器人的控制系统发送的无线起飞控制信号,根据所述无线起飞控制信号,所述电控按钮缩进至所述支撑柱内,同时,所述微型直流无刷电机接收扑翼飞行机器人的控制系统发送的起飞控制电信号,并根据所述起飞控制电信号启动,带动所述第一摆杆逆时针转动,所述第一摆杆带动所述第二转轴和所述第一齿轮同轴转动,所述第二齿轮与所述第一齿轮相啮合,所述第一齿轮带动所述第二齿轮转动,进而使所述第五转轴转动,所述第五转轴带动所述第三摆杆顺时针转动,所述第三摆杆使所述第七转轴和所述第三齿轮同轴转动,所述第四齿轮与所述第三齿轮相啮合,所述第三齿轮带动所述第四齿轮转动,进而使所述第八转轴转动,所述第八转轴带动所述支撑柱外壳以及所述支撑柱逆时针转动,直至所述第一摆杆和所述第三摆杆沿所述第二方向设置,通过所述支撑柱外壳内的所述弹簧的弹性势能,以及通过所述第一摆杆和所述第三摆杆沿所述第二方向设置升高扑翼飞行机器人,使扑翼飞行机器人起飞,之后,所述微型直流无刷电机接收扑翼飞行机器人的控制系统发送的飞行控制电信号,并根据所述飞行控制电信号带动所述第一摆杆顺时针转动,所述第一摆杆带动所述第二转轴和所述第一齿轮同轴转动,所述第二齿轮与所述第一齿轮相啮合,所述第一齿轮带动所述第二齿轮转动,进而使所述第五转轴转动,所述第五转轴带动所述第三摆杆逆时针转动,所述第三摆杆使所述第七转轴和所述第三齿轮同轴转动,所述第四齿轮与所述第三齿轮相啮合,所述第三齿轮带动所述第四齿轮转动,进而使所述第八转轴转动,所述第八转轴带动所述支撑柱外壳以及所述支撑柱顺时针转动,直至所述扑翼飞行机器人起降装置形成折叠状态,所述扑翼飞行机器人的控制系统控制所述微型直流无刷电机停止运行。
26、在本技术的一些实施例中,所述第一齿轮、所述第二齿轮、所述第三齿轮和所述第四齿轮均为直齿轮,且齿轮模数均为0.5,所述第一齿轮的齿数为20,所述第二齿轮的齿数为25,所述第三齿轮的齿数为20,所述第四齿轮的齿数为25。
27、在本技术的一些实施例中,所述支撑柱外壳包括壳体部和连接部,所述壳体部为一端开口的圆筒结构,所述连接部设置于所述壳体部的封闭端外侧表面上,所述连接部与所述第八转轴固定连接,所述支撑柱为圆柱体结构,且所述支撑柱的圆柱直径大小与所述壳体部的圆筒内直径大小相匹配,所述支撑柱的一端通过所述壳体部的开口端插设于所述壳体部内。
28、在本技术的一些实施例中,所述支撑柱与所述气垫之间通过万向节连接。
29、在本技术的一些实施例中,所述第一连接架包括依次首尾相连的第一侧表面、第二侧表面、第三侧表面和第四侧表面,所述第一侧表面、所述第二侧表面、所述第三侧表面以及所述第四侧表面相互配合围合形成具有第一内部空腔的框型结构,所述第一齿轮和所述第二齿轮设置于所述第一内部空腔内。
30、在本技术的一些实施例中,所述第二连接架包括依次首尾相连的第五侧表面、第六侧表面、第七侧表面和第八侧表面,所述第五侧表面、所述第六侧表面、所述第七侧表面以及所述第八侧表面相互配合围合形成具有第二内部空腔的框型结构,所述第三齿轮和所述第四齿轮设置于所述第二内部空腔内。
31、第二方面,本技术实施例提供了一种扑翼飞行机器人,包括:机身本体和至少一个第一方面所述的扑翼飞行机器人起降装置,所述扑翼飞行机器人起降装置的基座通过螺栓固定安装于所述机身本体上。
32、在本技术的一些实施例中,所述扑翼飞行机器人起降装置的个数为两个,两个所述扑翼飞行机器人起降装置对称设置于所述机身本体的两侧。
33、本技术实施例的有益效果如下:
34、采用基座、第一连接架、第二连接架、第一摆杆、第二摆杆、第三摆杆、第四摆杆、第一齿轮、第二齿轮、第三齿轮、第四齿轮、支撑柱外壳和支撑柱构成可折叠的飞行腿结构,在扑翼飞行机器人的飞行过程中,可通过折叠扑翼飞行机器人起降装置,减少扑翼飞行机器人飞行的阻力,并设置一端与支撑柱外壳固定连接,另一端与支撑柱的一端固定连接的弹簧,以及设置与支撑柱的另一端相连的气垫,可在扑翼飞行机器人的降落过程中起到减震的作用,还可在扑翼飞行机器人摆放时,通过压缩弹簧来降低重心,更加安全,同时,可通过设置于气垫上的电磁铁实现扑翼飞行机器人的精准定位降落,此外,在扑翼飞行机器人的起飞过程中,可通过弹簧的弹性势能,以及通过提高扑翼飞行机器人的高度,使其安全起飞。
- 还没有人留言评论。精彩留言会获得点赞!