一种自适应角动量限幅调整的姿态机动方法与流程
本发明属于航天器姿态控制,具体涉及一种自适应角动量限幅调整的姿态机动方法。
背景技术:
1、随着航天相关技术的快速发展,卫星姿态控制技术趋于成熟,对于具备姿态机动的卫星,一般采用设计固定角速度机动方式实现。
2、固定角速度机动方式存在的问题包括:①姿态机动前执行机构角动量需严格控制,因为姿态机动前执行机构角动量过大会导致机动过程执行机构输出能力饱和而散失控制能力的情况;②为确保姿态机动过程执行机构不饱和,往往姿态机动角速度会设计较大余量,未将机动能力用足。
技术实现思路
1、本发明的目的在于克服上述缺陷,提供一种自适应角动量限幅调整的姿态机动方法,解决了现有固定角速度机动方法存在的执行机构角动量设计方法复杂,容易导致机动过程执行机构输出能力饱和或机动能力未用足等技术问题。本发明能够保证机动过程执行机构角动量不超过输出能力的前提下最大程度利用执行够角动量,同时实现三轴同时机动到位。
2、为实现上述发明目的,本发明提供如下技术方案:
3、一种自适应角动量限幅调整的姿态机动方法,包括:
4、获取卫星本体的姿态四元数偏差和角速度偏差;
5、根据卫星本体的姿态四元数偏差得到卫星本体的三轴姿态机动角速度限幅值;
6、根据卫星本体的三轴姿态机动角速度限幅值得到卫星本体的三轴四元数偏差限幅值;
7、根据卫星本体的三轴四元数偏差限幅值得到矢量限幅后的卫星本体三轴四元数偏差;
8、根据矢量限幅后的卫星本体三轴四元数偏差和角速度偏差得到卫星本体的三轴指令控制力矩。
9、进一步的,卫星本体的姿态四元数偏差qe按照如下公式计算:
10、
11、其中,表示四元数乘法,qbo为卫星本体相对于轨道坐标系的姿态四元数,qmo为姿态机动目标姿态相对于轨道坐标系的姿态四元数。
12、进一步的,卫星本体的角速度偏差ωe按照如下公式计算:
13、ωe=ωbo-a(qe)ωmo;
14、其中,ωbo为卫星本体相对于轨道坐标系的姿态角速度在本体坐标系下的表示,a(qe)表示四元数偏差qe=[qe1 qe2 qe3 qe4]t的对应旋转矩阵,qe1、qe2、qe3、qe4为qe的矢量部分,ωmo为姿态机动目标姿态相对轨道坐标系的姿态角速度。
15、进一步的,
16、
17、进一步的,卫星本体的三轴姿态机动角速度限幅值ωmax按照如下公式计算:
18、
19、其中,ic为卫星本体主惯量组成的列向量;.*代表点乘;h_limit为执行机构的最大输出角动量模值,h_ini为姿态机动开始时执行机构的角动量模值。
20、进一步的,卫星本体的三轴四元数偏差限幅值qemax按照如下公式计算:
21、
22、其中,min表示取最小值,t_limit为卫星本体的三轴力矩限幅值,./代表点除,d为角速度偏差控制参数,k为姿态四元数偏差矢量控制参数。
23、进一步的,矢量限幅后的卫星本体三轴四元数偏差qev_vsat按照如下公式计算:
24、
25、qev=[qe1 qe2 qe3]t。
26、进一步的,卫星本体的三轴指令控制力矩tc按照如下公式计算:
27、
28、其中,qev_vsat为qev按照qemax进行矢量限幅输出的值,表示按照tmax_int进行限幅,tmax_int=0.005~0.02nm;kint为卫星本体四元数偏差矢量积分控制参数,t表示星上时间,∫qevdt表示对qev按照时间积分。
29、本发明与现有技术相比具有如下至少一种有益效果:
30、(1)本发明利用机动前执行机构角动量大小动态调整机动过程姿态四元数偏差限幅,保证机动过程执行机构角动量不超过输出能力的前提下最大程度利用执行够角动量,提高机动快速性;
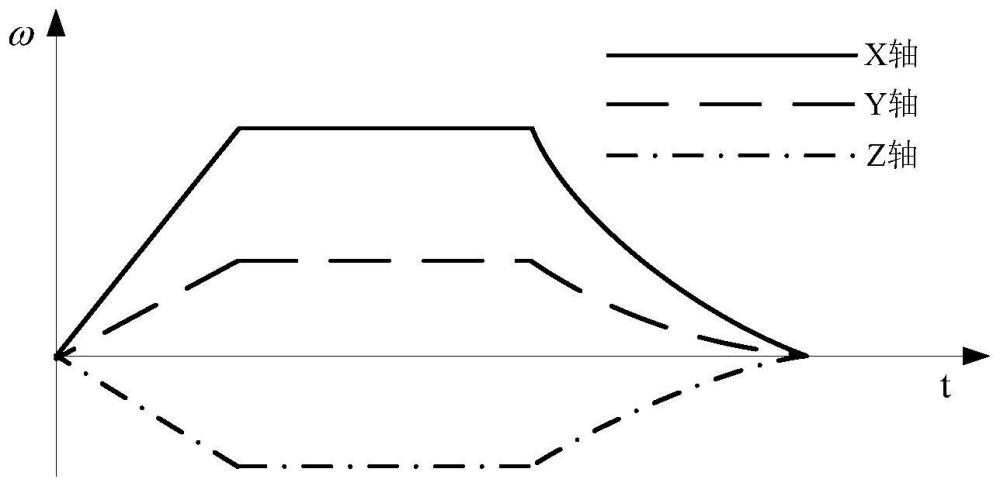
31、(2)本发明机动过程采用四元数偏差矢量部分矢量限幅,限幅值设计考虑各轴主惯量和四元数偏差大小分配角动量,实现三轴同时机动并且同时到位。
技术特征:
1.一种自适应角动量限幅调整的姿态机动方法,其特征在于,包括:
2.根据权利要求1所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,卫星本体的姿态四元数偏差qe按照如下公式计算:
3.根据权利要求2所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,卫星本体的角速度偏差ωe按照如下公式计算:
4.根据权利要求3所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,
5.根据权利要求4所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,卫星本体的三轴姿态机动角速度限幅值ωmax按照如下公式计算:
6.根据权利要求5所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,卫星本体的三轴四元数偏差限幅值qemax按照如下公式计算:
7.根据权利要求6所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,矢量限幅后的卫星本体三轴四元数偏差qev_vsat按照如下公式计算:
8.根据权利要求7所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,卫星本体的三轴指令控制力矩tc按照如下公式计算:
9.根据权利要求8所述的一种自适应角动量限幅调整的姿态机动方法,其特征在于,tmax_int=0.005~0.02nm。
技术总结
本发明公开了一种自适应角动量限幅调整的姿态机动方法,包括:获取卫星本体的姿态四元数偏差和角速度偏差;根据卫星本体的姿态四元数偏差得到三轴姿态机动角速度限幅值;根据卫星本体三轴姿态机动角速度限幅值得到卫星本体三轴四元数偏差限幅值;根据卫星本体三轴四元数偏差限幅值计算矢量限幅后的卫星本体的姿态四元数偏差;根据矢量限幅后的卫星本体三轴四元数偏差和角速度偏差得到三轴指令控制力矩。本发明能够保证机动过程执行机构角动量不超过输出能力的前提下最大程度利用执行够角动量,同时实现三轴同时机动到位。
技术研发人员:刘德庆,李同顺,陈撼,裴甲瑞,吴敬玉,钟金凤,陈秀梅,胡文坤,张增安,郭思岩
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!