一种具备安全监控功能的桥式起重机及其使用方法与流程
[0001]
本发明涉及起重机技术领域,具体为一种具备安全监控功能的桥式起重机及其使用方法。
背景技术:
[0002]
起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械,又称天车,航吊,吊车,桥式起重机是横架于车间、仓库和料场上空进行物料吊运的起重设备,由于它的两端坐落在高大的水泥柱或者金属支架上,形状似桥,桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,可以充分利用桥架下面的空间吊运物料,不受地面设备的阻碍,它是使用范围最广、数量最多的一种起重机械,现有的桥式起重机,通常不具备安全监控功能,在起重过程中无法对待牵引物件的重量进行测量,且物件容易与起重机发生碰撞,存在一定的安全隐患,因此,为了解决上述问题,我们设计出了一种具备安全监控功能的桥式起重机。
技术实现要素:
[0003]
本发明要解决的技术问题是克服现有的缺陷,提供一种具备安全监控功能的桥式起重机及其使用方法,可以快速完成对不同位置物件的牵引提起工作,还可以对待牵引物件的重量和移动块的距离进行监控,消除了起重过程中的安全隐患,可以有效解决背景技术中的问题。
[0004]
为实现上述目的,本发明提供如下技术方案:一种具备安全监控功能的桥式起重机,包括底板、驱动结构和位置调节结构,底板个数为两个,底板的上表面均设有升降台,升降台的内部均滑动连接有升降块,升降块的上表面均设有前后对称的导向柱,导向柱穿过升降台上表面的通孔并延伸至升降台的上侧,前后同侧的两个导向柱上端均与连接块的底面固定连接,两侧的连接块上表面均与牵引台的底面固定连接,驱动结构设置于升降台的外侧面,驱动结构与升降块的外侧面通过轴承转动连接,位置调节结构设置于牵引台的中部,还包括plc控制器,所述plc控制器设置于右侧的升降台前侧面,plc控制器的输入端电连接外部电源,可以快速完成对不同位置物件的牵引提起工作,还可以对待牵引物件的重量和移动块的距离进行监控,消除了起重过程中的安全隐患。
[0005]
进一步的,所述驱动结构包括齿牙、u形架、齿轮电机和齿轮,所述升降台外侧面开口的后侧内壁均设有均匀分布的齿牙,升降台外侧面的滑槽内均滑动连接有u形架,u形架与对应的升降块外侧面之间均通过轴承转动连接有齿轮,u形架外侧面设置的齿轮电机输出轴与对应的齿轮外端转轴固定连接,齿轮与齿牙啮合连接,齿轮电机的输入端电连接plc控制器的输出端,可以快速完成对重物的牵引提起工作。
[0006]
进一步的,所述位置调节结构包括螺杆、螺杆电机、移动块和牵引钩,所述螺杆通过轴承转动连接于牵引台中部的开口内,牵引台右侧面设置的螺杆电机输出轴与螺杆的右端固定连接,牵引台中部的开口内滑动连接有移动块,螺杆与移动块中部的螺孔螺纹连接,
移动块的内部滑动连接有牵引钩,螺杆电机的输入端电连接plc控制器的输出端,可以满足不同位置物件的牵引工作。
[0007]
进一步的,所述位置调节结构还包括压持块和弹簧,所述牵引钩的顶端设有压持块,压持块的前后两端穿过移动块对应侧面的开口并在底面设有弹簧,可以将压力传递至称重传感器。
[0008]
进一步的,所述移动块底部板体的上表面前后两侧均设有称重传感器,弹簧的底端与对应的称重传感器接触,左侧的连接块右侧面设有超声波传感器,称重传感器和超声波传感器的输出端均电连接plc控制器的输入端,可以对待牵引物件的重量和移动块的距离进行监控,消除了起重过程中的安全隐患。
[0009]
进一步的,所述底板的前后侧面均设有延伸架,延伸架的内部均通过销轴转动连接有移动轮,可以将该起重机移动至任意位置,便于人员使用。
[0010]
进一步的,所述牵引钩的外部套设有橡胶套,可以保护牵引钩不受磨损。
[0011]
进一步的,一种具备安全监控功能的桥式起重机的使用方法:s1.通过移动轮将该起重机移动至指定位置后,通过plc控制器的调控,螺杆电机根据物料位置进行运转,带动螺杆转动,由于牵引台中部的开口内滑动连接有移动块,螺杆与移动块中部的螺孔螺纹连接,进而带动移动块进行横向移动,随后将待牵引物料上固定在牵引钩上;s2.齿轮电机运转,带动齿轮转动,由于齿轮与齿牙啮合连接,通过u形架带动升降块上升,再由升降块带动导向柱以及牵引台上升,将牵引钩上的物件提起,牵引钩将物件的重力传递至压持块,压持块受力使弹簧对称重传感器产生压力,称重传感器将压力计算并反馈至plc控制器,对待牵引物件的质量进行称重;s3.超声波传感器对移动块与牵引台之间的距离进行测量,并将数据反馈至plc控制器,防止移动块与牵引台距离过近使物件与该起重机发生碰撞。
[0012]
与现有技术相比,本发明的有益效果是:本具备安全监控功能的桥式起重机,具有以下好处:1、通过移动轮可以将该起重机移动至任意位置,便于人员使用,待该起重机移动至指定位置后,通过plc控制器的调控,螺杆电机根据物料位置进行运转,带动螺杆转动,由于牵引台中部的开口内滑动连接有移动块,螺杆与移动块中部的螺孔螺纹连接,可以带动移动块进行横向移动,满足不同位置物件的牵引工作。
[0013]
2、随后将待牵引物料上固定在牵引钩上,橡胶套可以保护牵引钩不受磨损,齿轮电机运转,带动齿轮转动,由于齿轮与齿牙啮合连接,可以通过u形架带动升降块上升,再由升降块带动导向柱以及牵引台上升,将牵引钩上的物件提起,快速完成对重物的牵引提起工作。
[0014]
3、牵引钩将物件的重力传递至压持块,压持块受力使弹簧对称重传感器产生压力,称重传感器将该压力计算并反馈至plc控制器,可以对待牵引物件的质量进行称重,避免待牵引物件超过该起重机的最大起重数值,起到了安全监控的作用,超声波传感器可以对移动块与牵引台之间的距离进行测量,并将数据反馈至plc控制器,防止移动块与牵引台距离过近使物件与该起重机发生碰撞。
附图说明
[0015]
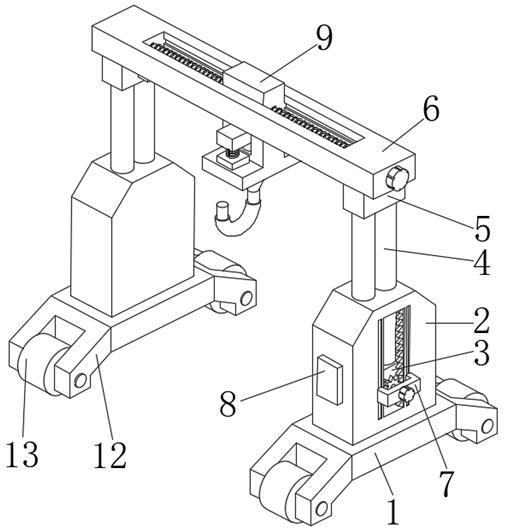
图1为本发明一种具备安全监控功能的桥式起重机的结构示意图;图2为本发明一种具备安全监控功能的桥式起重机的内剖结构示意图;图3为图2中a处放大结构示意图;图4为图2中b处放大结构示意图。
[0016]
图中:1底板、2升降台、3升降块、4导向柱、5连接块、6牵引台、7驱动结构、71齿牙、72 u形架、73齿轮电机、74齿轮、8 plc控制器、9位置调节结构、91螺杆、92螺杆电机、93移动块、94牵引钩、95压持块、96弹簧、10称重传感器、11超声波传感器、12延伸架、13移动轮、14橡胶套。
具体实施方式
[0017]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0018]
请参阅图1-4,本发明提供以下技术方案:实施例一:一种具备安全监控功能的桥式起重机,包括底板1、驱动结构7和位置调节结构9,底板1个数为两个,底板1的上表面均设有升降台2,升降台2的内部均滑动连接有升降块3,升降块3的上表面均设有前后对称的导向柱4,导向柱4穿过升降台2上表面的通孔并延伸至升降台2的上侧,前后同侧的两个导向柱4上端均与连接块5的底面固定连接,两侧的连接块5上表面均与牵引台6的底面固定连接,驱动结构7设置于升降台2的外侧面,驱动结构7与升降块3的外侧面通过轴承转动连接,位置调节结构9设置于牵引台6的中部,还包括plc控制器8,plc控制器8设置于右侧的升降台2前侧面,plc控制器8的输入端电连接外部电源。
[0019]
其中:移动块93底部板体的上表面前后两侧均设有称重传感器10,弹簧96的底端与对应的称重传感器10接触,左侧的连接块5右侧面设有超声波传感器11,称重传感器10和超声波传感器11的输出端均电连接plc控制器8的输入端,牵引钩94将物件的重力传递至压持块95,压持块95受力使弹簧96对称重传感器10产生压力,称重传感器10将该压力计算并反馈至plc控制器8,可以对待牵引物件的质量进行称重,避免待牵引物件超过该起重机的最大起重数值,起到了安全监控的作用,超声波传感器11可以对移动块93与牵引台6之间的距离进行测量,并将数据反馈至plc控制器8,防止移动块93与牵引台6距离过近使物件与该起重机发生碰撞。
[0020]
其中:底板1的前后侧面均设有延伸架12,延伸架12的内部均通过销轴转动连接有移动轮13,通过移动轮13可以将该起重机移动至任意位置,便于人员使用。
[0021]
其中:牵引钩94的外部套设有橡胶套14,橡胶套14可以保护牵引钩94不受磨损。
[0022]
实施例二:本实施例与实施例一的区别在于:本实施例中,驱动结构7包括齿牙71、u形架72、齿轮电机73和齿轮74,升降台2外侧面开口的后侧内壁均设有均匀分布的齿牙71,升降台2外侧面的滑槽内均滑动连接有u形架72,u
形架72与对应的升降块3外侧面之间均通过轴承转动连接有齿轮74,u形架72外侧面设置的齿轮电机73输出轴与对应的齿轮74外端转轴固定连接,齿轮74与齿牙71啮合连接,齿轮电机73的输入端电连接plc控制器8的输出端。
[0023]
具体的,这样设置,将待牵引物料上固定在牵引钩94上,齿轮电机73运转,带动齿轮74转动,由于齿轮74与齿牙71啮合连接,可以通过u形架72带动升降块3上升,再由升降块3带动导向柱4以及牵引台6上升,将牵引钩94上的物件提起。
[0024]
实施例三:本实施例与实施例一的区别在于:本实施例中,位置调节结构9包括螺杆91、螺杆电机92、移动块93和牵引钩94,螺杆91通过轴承转动连接于牵引台6中部的开口内,牵引台6右侧面设置的螺杆电机92输出轴与螺杆91的右端固定连接,牵引台6中部的开口内滑动连接有移动块93,螺杆91与移动块93中部的螺孔螺纹连接,移动块93的内部滑动连接有牵引钩94,螺杆电机92的输入端电连接plc控制器8的输出端,位置调节结构9还包括压持块95和弹簧96,牵引钩94的顶端设有压持块95,压持块95的前后两端穿过移动块93对应侧面的开口并在底面设有弹簧96。
[0025]
具体的,这样设置,待该起重机移动至指定位置后,通过plc控制器8的调控,螺杆电机92根据物料位置进行运转,带动螺杆91转动,由于牵引台6中部的开口内滑动连接有移动块93,螺杆91与移动块93中部的螺孔螺纹连接,可以带动移动块93进行横向移动,满足不同位置物件的牵引工作。
[0026]
在使用时:通过移动轮13可以将该起重机移动至任意位置,便于人员使用,待该起重机移动至指定位置后,通过plc控制器8的调控,螺杆电机92根据物料位置进行运转,带动螺杆91转动,由于牵引台6中部的开口内滑动连接有移动块93,螺杆91与移动块93中部的螺孔螺纹连接,可以带动移动块93进行横向移动,满足不同位置物件的牵引工作,随后将待牵引物料上固定在牵引钩94上,橡胶套14可以保护牵引钩94不受磨损,齿轮电机73运转,带动齿轮74转动,由于齿轮74与齿牙71啮合连接,可以通过u形架72带动升降块3上升,再由升降块3带动导向柱4以及牵引台6上升,将牵引钩94上的物件提起,牵引钩94将物件的重力传递至压持块95,压持块95受力使弹簧96对称重传感器10产生压力,称重传感器10将该压力计算并反馈至plc控制器8,可以对待牵引物件的质量进行称重,避免待牵引物件超过该起重机的最大起重数值,起到了安全监控的作用,超声波传感器11可以对移动块93与牵引台6之间的距离进行测量,并将数据反馈至plc控制器8,防止移动块93与牵引台6距离过近使物件与该起重机发生碰撞。
[0027]
值得注意的是,本实施例中所公开的plc控制器8核心芯片选用的是西门子s7-300单片机,称重传感器10选用的是广州兰瑟电子科技有限公司出品的616-1000kg称重传感器,超声波传感器11选用的是广州宝盾电子科技有限公司出品的m18u150-pn-45-l5超声波传感器,齿轮电机73和螺杆电机92均选用的是东莞市威邦机电有限公司出品的5ik150rgu-cf调速电机,plc控制器8控制称重传感器10、超声波传感器11、齿轮电机73和螺杆电机92工作采用现有技术中常用的方法。
[0028]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1