一种极板码垛线用的码垛桁架机械手的制作方法
1.本实用新型涉及码垛机械手技术领域,具体为一种极板码垛线用的码垛桁架机械手。
背景技术:
2.码垛机械手是研制开发的新机型,质量稳定,性价比高,码垛机械手的程序里所需要定位的只有两点,一个是抓起点,一个是摆放点,这两点之间以外的轨道全由电脑来控制,电脑自己会寻找这两点的最合理的轨道来移动,所以教示方法极为简单,机械手原理上属于直线运动。本设备适应于化工、饮料、食品、啤酒、塑料等自动生产企业;对各种纸箱、袋装、罐装、啤酒箱等各种形状的包装都适应,在极板生产出来后需要用到码垛机械手对极板进行码垛,现有的码垛机械手结构都比较复杂,对于新手的学习和使用较为困难,因此为了解决此类问题,我们提出一种极板码垛线用的码垛桁架机械手。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种极板码垛线用的码垛桁架机械手,能够实现极板的自动码垛作业,节省大量人力,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种极板码垛线用的码垛桁架机械手,包括固定支架、y向驱动单元、z向驱动单元、旋转单元和插料单元;
5.固定支架:数量为两个,两个固定支架的上端均与安装横梁的下表面固定连接,安装横梁的前侧面设有两条对称分布的第一线轨;
6.y向驱动单元:设置于安装横梁的上端,y向驱动单元后端设置的滑块与第一线轨滑动连接;
7.z向驱动单元:设置于y向驱动单元的前端;
8.旋转单元:设置于z向驱动单元的前端;
9.插料单元:设置于旋转单元的下端,插料单元的左端设有均匀分布的极板压紧气缸,极板压紧气缸的伸缩端下端均设有压块;
10.其中:还包括plc控制器,所述plc控制器设置于左侧的固定支架前侧面中部,plc控制器的输入端电连接外部电源,能够实现极板的自动码垛作业,节省大量人力,降低生产成本,装置结构简单,便于新手的快速学习和使用,各部件之间联系紧密,不同移动方位均提供有线轨导向,提高装置运行的稳定性。
11.进一步的,所述y向驱动单元包括一号电机、第一安装座、链轮、链条和安装基板,所述第一安装座数量为两个,第一安装座分别设置于安装横梁的上表面左右两端,第一安装座的前侧面中部均通过轴承转动连接有链轮,两个链轮通过链条传动连接,左侧的第一安装座后侧面设有一号电机,一号电机的输出轴前端与左侧的链轮后端固定连接,安装基板后侧面设置的滑块分别与第一线轨滑动连接,安装基板后侧面上端设置的连接块与链条
固定连接,一号电机的输入端电连接plc控制器的输出端,能够带动机械手进行y向移动。
12.进一步的,所述z向驱动单元包括二号电机、丝杆、第二线轨、驱动座、驱动安装板和旋转安装座,所述二号电机设置于安装基板的上端,安装基板的前侧面设有两块对称分布的旋转安装座,两个旋转安装座之间通过轴承转动连接有丝杆,二号电机的输出轴下端与丝杆的顶部端头固定连接,第二线轨对称设置于安装基板的前侧面左右两端,驱动安装板通过滑块滑动与第二线轨滑动连接,驱动座设置于驱动安装板的后侧面中部上端,驱动座中部开设的螺纹孔与丝杆螺纹连接,二号电机的输入端电连接plc控制器的输出端,能够带动机械手进行z向的升降移动。
13.进一步的,所述旋转单元包括u轴伺服、第二安装座和旋转稳定座,所述第二安装座设置于驱动安装板的前侧面上端,旋转稳定座设置于驱动安装板的前侧面下端,u轴伺服设置于第二安装座的上端,u轴伺服的输出轴下端通过轴承与旋转稳定座转动连接,u轴伺服的输入端电连接plc控制器的输出端,能够使机械手进行平面角度调节。
14.进一步的,所述插料单元包括电动推杆、安装框架、第三线轨、l型连接座、连接板和插料头,所述安装框架设置于u轴伺服的输出轴下端端头处,极板压紧气缸均匀分部于安装框架的左侧面上端,第三线轨对称设置于安装框架的下表面前后两端,连接板上表面前后两端设置的滑块与第三线轨滑动连接,l型连接座设置于连接板的上表面中部,电动推杆设置于安装框架的右侧板体中部,电动推杆的伸缩端左端与l型连接座固定连接,连接板的左侧面设有均匀分布的插料头,压块与插料头位置对应,电动推杆输入端电连接plc控制器的输出端,能够插着极板进行移动。
15.与现有技术相比,本实用新型的有益效果是:本极板码垛线用的码垛桁架机械手,具有以下好处:
16.1、把固定支架在安装位置固定,实现固定支架及上方部件的安装与固定,把外部空压机的出气口与极板压紧气缸的进气口通过气管连通,当外部送料设备把极板送至本码垛桁架机械手下方时,在plc控制器的调控下,码垛桁架机械手工作,对极板进行码垛,能够实现极板的自动码垛作业,节省大量人力,降低生产成本。
17.2、码垛过程中,当机械手需要进行y向移动时,在plc控制器的调控下,一号电机工作,输出轴带动左侧的链轮转动,在左右两端的链轮的左右下,使链条进行转动,链条的转动力通过安装基板后侧面上端设置的连接块传递给安装基板,使安装基板带着前方的部件沿第一线轨的导向进行左右移动,当机械手需要进行z向升降移动时,在plc控制器的调控下,二号电机工作,输出轴带动丝杆通过轴承转动,丝杆在转动的过程中通过驱动座带动驱动安装板及前方部件沿第二线轨进行上下移动,当机械手需要进行水平角度调节时,在plc控制器的调控下,u轴伺服工作,输出轴通过旋转稳定座上的轴承带动安装框架及下方部件进行转动,以此实现机械手的平面角度调节,机械手位置调节完毕后,在plc控制器的调控下,电动推杆工作,伸缩端伸展,通过l型连接座推着连接板向左移动,连接板带着插料头同步移动,以此使插料头插在极板的下方,同时,外部空压机把空气压缩后吹入极板压紧气缸的内部,使极板压紧气缸的伸缩端伸展,板压紧气缸的伸缩端带着压块向下压,在压块与插料头的作用下夹紧插料头上方的材料,随后,在plc控制器的调控下,机械手进行不同方位的调整,对插料头上方的极板进行码垛,装置结构简单,便于新手的快速学习和使用,各部件之间联系紧密,不同移动方位均提供有线轨导向,提高装置运行的稳定性。
附图说明
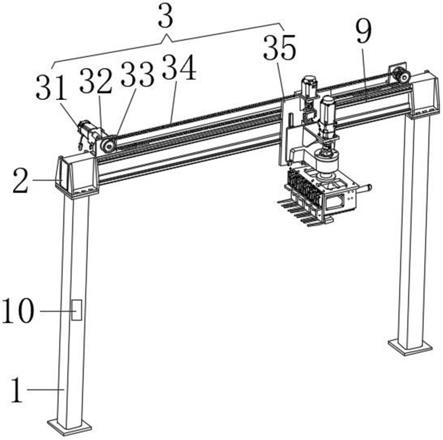
18.图1为本实用新型结构示意图;
19.图2为本实用新型局部放大结构示意图;
20.图3为本实用新型z向驱动单元示意图;
21.图4为本实用新型插料单元示意图。
22.图中:1固定支架、2安装横梁、3y向驱动单元、31一号电机、32第一安装座、33链轮、34链条、35安装基板、4z向驱动单元、41二号电机、42丝杆、43第二线轨、44驱动座、45驱动安装板、46旋转安装座、5旋转单元、51u轴伺服、52第二安装座、53旋转稳定座、6插料单元、61电动推杆、62安装框架、63第三线轨、64l型连接座、65连接板、66插料头、7极板压紧气缸、8压块、9第一线轨、10plc控制器。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1
‑
4,本实用新型提供一种技术方案:一种极板码垛线用的码垛桁架机械手,包括固定支架1、y向驱动单元3、z向驱动单元4、旋转单元5和插料单元6;
25.固定支架1:数量为两个,固定支架1便于装置在安装位置固定,两个固定支架1的上端均与安装横梁2的下表面固定连接,安装横梁2为其它部件提供一个安装场所,安装横梁2的前侧面设有两条对称分布的第一线轨9,第一线轨9为装置的移动提供一个导向作用;
26.y向驱动单元3:y向驱动单元3能够驱动机械手进行左右移动,设置于安装横梁2的上端,y向驱动单元3后端设置的滑块与第一线轨9滑动连接,y向驱动单元3包括一号电机31、第一安装座32、链轮33、链条34和安装基板35,第一安装座32数量为两个,第一安装座32分别设置于安装横梁2的上表面左右两端,第一安装座32的前侧面中部均通过轴承转动连接有链轮33,两个链轮33通过链条34传动连接,左侧的第一安装座32后侧面设有一号电机31,一号电机31的输出轴前端与左侧的链轮33后端固定连接,安装基板35后侧面设置的滑块分别与第一线轨9滑动连接,安装基板35后侧面上端设置的连接块与链条34固定连接,当机械手需要进行y向移动时,在plc控制器10的调控下,一号电机31工作,输出轴带动左侧的链轮33转动,在左右两端的链轮33的左右下,使链条34进行转动,链条34的转动力通过安装基板35后侧面上端设置的连接块传递给安装基板35,使安装基板35带着前方的部件沿第一线轨9的导向进行左右移动,一号电机31的输入端电连接plc控制器10的输出端;
27.z向驱动单元4:z向驱动单元4能够驱动机械手进行上下移动,设置于y向驱动单元3的前端,z向驱动单元4包括二号电机41、丝杆42、第二线轨43、驱动座44、驱动安装板45和旋转安装座46,二号电机41设置于安装基板35的上端,安装基板35的前侧面设有两块对称分布的旋转安装座46,两个旋转安装座46之间通过轴承转动连接有丝杆42,二号电机41的输出轴下端与丝杆42的顶部端头固定连接,第二线轨43对称设置于安装基板35的前侧面左右两端,驱动安装板45通过滑块滑动与第二线轨43滑动连接,驱动座44设置于驱动安装板45的后侧面中部上端,驱动座44中部开设的螺纹孔与丝杆42螺纹连接,当机械手需要进行z
向升降移动时,在plc控制器10的调控下,二号电机41工作,输出轴带动丝杆42通过轴承转动,丝杆42在转动的过程中通过驱动座44带动驱动安装板45及前方部件沿第二线轨43进行上下移动,二号电机41的输入端电连接plc控制器10的输出端;
28.旋转单元5:旋转单元5能够驱动机械手进行平面角度调节,设置于z向驱动单元4的前端,旋转单元5包括u轴伺服51、第二安装座52和旋转稳定座53,第二安装座52设置于驱动安装板45的前侧面上端,旋转稳定座53设置于驱动安装板45的前侧面下端,u轴伺服51设置于第二安装座52的上端,u轴伺服51的输出轴下端通过轴承与旋转稳定座53转动连接,当机械手需要进行水平角度调节时,在plc控制器10的调控下,u轴伺服51工作,输出轴通过旋转稳定座53上的轴承带动下方部件进行转动,u轴伺服51的输入端电连接plc控制器10的输出端;
29.插料单元6:插料单元6能够带动极板移动,实现码垛作业,设置于旋转单元5的下端,插料单元6的左端设有均匀分布的极板压紧气缸7,极板压紧气缸7的伸缩端下端均设有压块8,极板压紧气缸7驱动压块8对极板进行压紧,插料单元6包括电动推杆61、安装框架62、第三线轨63、l型连接座64、连接板65和插料头66,安装框架62设置于u轴伺服51的输出轴下端端头处,极板压紧气缸7均匀分部于安装框架62的左侧面上端,第三线轨63对称设置于安装框架62的下表面前后两端,连接板65上表面前后两端设置的滑块与第三线轨63滑动连接,l型连接座64设置于连接板65的上表面中部,电动推杆61设置于安装框架62的右侧板体中部,电动推杆61的伸缩端左端与l型连接座64固定连接,连接板65的左侧面设有均匀分布的插料头66,压块8与插料头66位置对应,电动推杆61工作,伸缩端伸展,通过l型连接座64推着连接板65向左移动,连接板65带着插料头66同步移动,以此使插料头66插在极板的下方,同时,外部空压机把空气压缩后吹入极板压紧气缸7的内部,使极板压紧气缸7的伸缩端伸展,板压紧气缸7的伸缩端带着压块8向下压,在压块8与插料头66的作用下夹紧插料头66上方的材料,随后,在plc控制器10的调控下,机械手进行不同方位的调整,对插料头66上方的极板进行码垛,电动推杆61输入端电连接plc控制器10的输出端;
30.其中:还包括plc控制器10,plc控制器10调控各部件的正常运行,plc控制器10设置于左侧的固定支架1前侧面中部,plc控制器10的输入端电连接外部电源。
31.在使用时:把固定支架1在安装位置固定,实现固定支架1及上方部件的安装与固定,把外部空压机的出气口与极板压紧气缸7的进气口通过气管连通,当外部送料设备把极板送至本码垛桁架机械手下方时,在plc控制器10的调控下,码垛桁架机械手工作,对极板进行码垛,码垛过程中,当机械手需要进行y向移动时,在plc控制器10的调控下,一号电机31工作,输出轴带动左侧的链轮33转动,在左右两端的链轮33的左右下,使链条34进行转动,链条34的转动力通过安装基板35后侧面上端设置的连接块传递给安装基板35,使安装基板35带着前方的部件沿第一线轨9的导向进行左右移动,当机械手需要进行z向升降移动时,在plc控制器10的调控下,二号电机41工作,输出轴带动丝杆42通过轴承转动,丝杆42在转动的过程中通过驱动座44带动驱动安装板45及前方部件沿第二线轨43进行上下移动,当机械手需要进行水平角度调节时,在plc控制器10的调控下,u轴伺服51工作,输出轴通过旋转稳定座53上的轴承带动安装框架62及下方部件进行转动,以此实现机械手的平面角度调节,机械手位置调节完毕后,在plc控制器10的调控下,电动推杆61工作,伸缩端伸展,通过l型连接座64推着连接板65向左移动,连接板65带着插料头66同步移动,以此使插料头66插
在极板的下方,同时,外部空压机把空气压缩后吹入极板压紧气缸7的内部,使极板压紧气缸7的伸缩端伸展,板压紧气缸7的伸缩端带着压块8向下压,在压块8与插料头66的作用下夹紧插料头66上方的材料,随后,在plc控制器10的调控下,机械手进行不同方位的调整,对插料头66上方的极板进行码垛。
32.值得注意的是,本实施例中所公开的plc控制器10具体型号为西门子s7
‑
200,一号电机31可选用杭州泽锦金属制品有限公司型号为60st
‑
m01330的伺服电机,二号电机41和u轴伺服51均可选用杭州泽锦金属制品有限公司型号为60st
‑
m00630的伺服电机,电动推杆61可选用上海狄兹精密机械股份有限公司型号为dmac20的电动推杆,plc控制器10控制一号电机31、二号电机41、u轴伺服51和电动推杆61工作采用现有技术中常用的方法。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1