一种智能化仓储物流运输机器人的制作方法
1.本实用新型涉及运输机器人技术领域,具体为一种智能化仓储物流运输机器人。
背景技术:
2.电子商务的蓬勃发展,让国内仓储物流同样得到了前所未有的提速,人工搬运效率低,对城市迅速发展物流需要已经落后,但如何让仓储物流的搬运同样得到提速,为此,市面上出现了一种运输机器人,然而,现有的运输机器人不能够进行卸货,仍然需要人力进行,费时费力。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种智能化仓储物流运输机器人,操作方便,省时省力,避免了人力卸货的麻烦,提高了运输的效率,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种智能化仓储物流运输机器人,包括移动车体、滑槽、电机和托盘;
5.移动车体:侧面分别安装有单片机和电源,所述移动车体的顶部安装有升降机构,升降机构的顶部固定有车架;
6.滑槽:开设在车架的内侧,所述滑槽的内部滑动连接有滑轨,滑槽的内部转动连接有丝杆,且丝杆与滑轨螺纹连接,所述滑轨有两组,两组滑轨左右对称设置;
7.电机:安装在车架的侧面,所述电机的输出轴通过传动机构与丝杆的外端部传动连接;
8.托盘:通过卡接机构连接在滑轨的顶部;
9.其中,所述电源的输出端电连接单片机的输入端,所述单片机的输出端电连接电机和移动车体内部控制电路的输入端。
10.进一步的,所述升降机构包括电动推杆和减震座,电动推杆安装在移动车体的顶部,所述减震座固定在电动推杆的伸缩端部,车架固定在减震座的顶部,所述电动推杆的输入端电连接单片机的输出端,将货物放置在托盘上,通过移动车体将货物运输到相应的区域,电动推杆的伸缩端带动减震座进行升降运动,从而对车架的高度进行调节,从而使货物调节到与对应放置点相适应的高度,其调节方便,保证了设计的合理性。
11.进一步的,所述传动机构包括从动齿轮、链条和主动齿轮,主动齿轮固定在电机的输出轴上,所述从动齿轮固定在丝杆的外端部,从动齿轮通过链条与主动齿轮传动连接,电机的输出轴带动主动齿轮转动,主动齿轮通过链条与从动齿轮转动,从动齿轮带动丝杆转动,通过传动保证了两组丝杆转动的同步性。
12.进一步的,所述卡接机构包括卡槽和卡条,卡条固定在托盘的底部,所述卡槽开设在滑轨上,卡条与卡槽卡接,当需要对托盘进行尺寸更换时候,扣动卡条使其从卡槽内退出即可对托盘与滑轨进行分离,其拆卸方便,便于满足运输需求。
13.进一步的,还包括加强肋,所述加强肋均匀固定在两组滑轨之间,加强肋用于加强两组滑轨之间的连接强度。
14.与现有技术相比,本实用新型的有益效果是:本智能化仓储物流运输机器人,具有以下好处:将货物放置在托盘上,通过移动车体将货物运输到相应的区域,电动推杆的伸缩端带动减震座进行升降运动,从而对车架的高度进行调节,从而使货物调节到与对应放置点相适应的高度,然后,电机的输出轴带动主动齿轮转动,主动齿轮通过链条与从动齿轮转动,从动齿轮带动丝杆转动,丝杆与滑轨螺纹传动,滑轨沿着滑槽滑动,滑轨带动托盘与车架发生相对位移,从而使货物运输在货架上,升降机构收缩,此时货物的两边与货架接触,退出移动车体即可,其操作方便,省时省力,避免了人力卸货的麻烦,提高了运输的效率。
附图说明
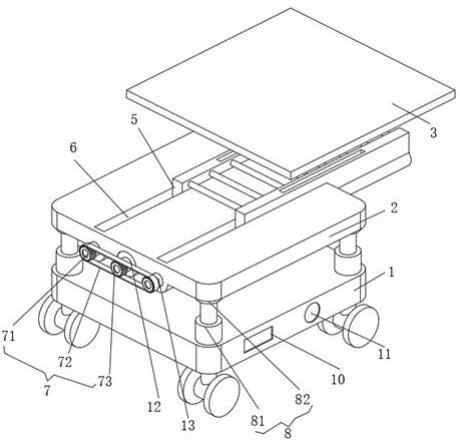
15.图1为本实用新型结构示意图;
16.图2为本实用新型结构剖面图。
17.图中:1移动车体、2车架、3托盘、4加强肋、5滑轨、6滑槽、7传动机构、71从动齿轮、72链条、73主动齿轮、8升降机构、81电动推杆、82减震座、9卡接机构、91卡槽、92卡条、10单片机、11电源、12电机、13丝杆。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1
‑
2,本实用新型提供一种技术方案:一种智能化仓储物流运输机器人,包括移动车体1、滑槽6、电机12和托盘3;
20.移动车体1:侧面分别安装有单片机10和电源11,移动车体1的顶部安装有升降机构8,升降机构8的顶部固定有车架2;
21.滑槽6:开设在车架2的内侧,滑槽6的内部滑动连接有滑轨5,滑槽6的内部转动连接有丝杆13,且丝杆13与滑轨5螺纹连接,滑轨5有两组,两组滑轨5左右对称设置;
22.电机12:安装在车架2的侧面,电机12的输出轴通过传动机构7与丝杆13的外端部传动连接;
23.托盘3:通过卡接机构9连接在滑轨5的顶部;
24.丝杆13与滑轨5螺纹传动,滑轨5沿着滑槽6滑动,滑轨5带动托盘3与车架2发生相对位移,从而使货物运输在货架上,升降机构8收缩,此时货物的两边与货架接触,退出移动车体1即可,其操作方便,省时省力,避免了人力卸货的麻烦,提高了运输的效率;
25.其中,电源11的输出端电连接单片机10的输入端,单片机10的输出端电连接电机12和移动车体1内部控制电路的输入端。
26.升降机构8包括电动推杆81和减震座82,电动推杆81安装在移动车体1的顶部,减震座82固定在电动推杆81的伸缩端部,车架2固定在减震座82的顶部,电动推杆81的输入端电连接单片机10的输出端,将货物放置在托盘3上,通过移动车体1将货物运输到相应的区
域,电动推杆81的伸缩端带动减震座82进行升降运动,从而对车架2的高度进行调节,从而使货物调节到与对应放置点相适应的高度,其调节方便,保证了设计的合理性。
27.传动机构7包括从动齿轮71、链条72和主动齿轮73,主动齿轮73固定在电机12的输出轴上,从动齿轮71固定在丝杆13的外端部,从动齿轮71通过链条72与主动齿轮73传动连接,电机12的输出轴带动主动齿轮73转动,主动齿轮73通过链条72与从动齿轮71转动,从动齿轮71带动丝杆13转动,通过传动保证了两组丝杆13转动的同步性。
28.卡接机构9包括卡槽91和卡条92,卡条92固定在托盘3的底部,卡槽91开设在滑轨5上,卡条92与卡槽91卡接,当需要对托盘3进行尺寸更换时候,扣动卡条92使其从卡槽91内退出即可对托盘3与滑轨5进行分离,其拆卸方便,便于满足运输需求。
29.还包括加强肋4,加强肋4均匀固定在两组滑轨5之间,加强肋4用于加强两组滑轨5之间的连接强度。
30.在使用时:将货物放置在托盘3上,通过移动车体1将货物运输到相应的区域,电动推杆81的伸缩端带动减震座82进行升降运动,从而对车架2的高度进行调节,从而使货物调节到与对应放置点相适应的高度,然后,电机12的输出轴带动主动齿轮73转动,主动齿轮73通过链条72与从动齿轮71转动,从动齿轮71带动丝杆13转动,丝杆13与滑轨5螺纹传动,滑轨5沿着滑槽6滑动,滑轨5带动托盘3与车架2发生相对位移,从而使货物运输在货架上,升降机构8收缩,此时货物的两边与货架接触,退出移动车体1即可。
31.当需要对托盘3进行尺寸更换时候,扣动卡条92使其从卡槽91内退出即可对托盘3与滑轨5进行分离。
32.值得注意的是:单片机10控制电动推杆81、电机12和移动车体1均采用现有技术中常用的方法,单片机10的芯片结构与授权公布号cn 205708380 u专利中控制器的芯片结构相同,移动车体1采用授权公布号cn 205708380 u专利中的车体。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1