一种多气缸运动的气配结构的制作方法
1.本实用新型涉及一种气配结构,具体涉及一种多气缸运动的气配结构。
背景技术:
2.在很多一次性多产品搬送结构中,有会使用到间距自动调整的结构,为了应对个别时候的单个吸取情况,往往会在每个吸取头上添加一个气缸,用于区分作业吸头以及非作业吸头。气缸的添加直接导致了气管的数量增加,过多的气管拉扯会导致拖链内腔空间收挤压,以及增加了整体布线布管的困难度。所以为了减少气管的数量,我们往往一般会选用单作用气缸,即只有一个进气口的气缸,这种形式直接将走气管的数量减为一半。
3.现有的方式主要有两类:一种是使用单作用气缸,用于减少气管数量。另一种是使用双作用气缸,每组气缸都需要2根气管进行配气。
4.使用单作用气缸的好处是直接减少气管的数量,减少气管拉扯对机构整体的影响,提高拖链内的空余空间,减少拖链内侧的磨损。但是缺点则是速度响应不可控。往往会有回缩过慢或者回缩失败的现象。而且因为单作用气缸自身结构原因,同等规格下,一般长度尺寸会较双作用气缸更为偏长一些。
5.使用双作用气缸的好处是响应时间非常可靠,不再出现缩不回去的现象,而且长度方向尺寸较为短小。但是气管相对于单作用气缸过于繁多,对于机构整体拉扯现象较为明显,同时也提高了拖链内侧的磨损概率。
6.在芯片吸放动作组中,需要一组气缸分别对应一个芯片进行吸取作业。一组气缸携带数量一般会超过4个。在自动化运行过程中,我们需要实时监控吸头的状态,以确认后续动作的是否执行的依据。每个气缸都一般都具有2个运动状态,伸以及缩。如果一组气缸组具有8个气缸的话,则需要通过16根传感器线。这样就会产生至少2根信号线组,每根信号线组至少有约10的线径,而且直接会占用16个信号点位。占用物理空间以及信号资源。通常方式是将每个气缸都附带伸缩双信号,信号数量随着气缸数量的增加而呈现线性增加。
技术实现要素:
7.为解决上述问题,本实用新型提供一种多气缸运动的气配结构,保证气缸的响应,同时也能尽量减少气管的数量,通过外部借助统一的信号,进行所有气缸的状态整体判定。
8.本实用新型提供如下技术方案:
9.一种多气缸运动的气配结构,包括第一驱动气管、第二驱动气管、第三驱动气管、第四驱动气管、调压气路和多个作业吸头,作业吸头包括气缸、导向部和吸头,气缸下方连接导向部,导向部下方连接吸头,四根驱动气管分别与四个气缸连接,调压气路设置四个分支分别与四个气缸连接。
10.该气配结构还设置有上位置检测传感器和下位置检测传感器,四个作业吸头对应的每个导向部上开有光路通过孔,上位置检测传感器和下位置检测传感器发出的光束穿过光路通过孔。
11.两位置传感器选用ex
‑
13ea或ex
‑
13a。
12.与现有技术相比,本实用新型的有益效果是:
13.整体清算气管的输入只需要五路气管,减少了气管的数量,减少由于气管较多而产生的磨损概率,提高每个气缸各自的响应速度。
14.通过外部借助统一的信号,进行所有气缸的状态整体判定,减少信号线的数量并实现气缸组的整体监控。
15.多气缸的状态整体判定主要保证气缸的状态正确以及唯一确定性,以及机械设备动作的整体安全性。
附图说明
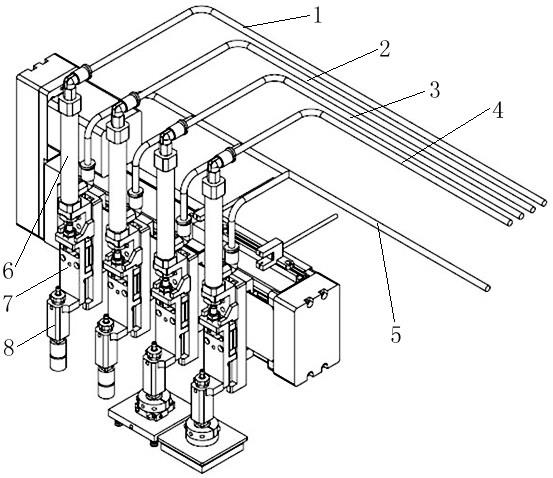
16.图1为本实用新型结构示意图。
17.图2为本实用新型的位置检测传感器的安装位置示意图。
18.图3为本实用新型的主视图。
19.图中:1、第一驱动气管;2、第二驱动气管;3、第三驱动气管;4、第四驱动气管;5、调压气路;6、气缸;7、导向部,71、光路通过孔;8、吸头;9、上位置检测传感器;10、下位置检测传感器。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没
21.有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
3,本实用新型的一种多气缸运动的气配结构,包括第一驱动气管1、第二驱动气管2、第三驱动气管3、第四驱动气管4、调压气路5和多个作业吸头,作业吸头包括气缸6、导向部7和吸头8,气缸6下方连接导向部7,导向部7下方连接吸头8,四根驱动气管分别与四个气缸6连接,调压气路5设置四个分支分别与四个气缸6连接。
23.该气配结构还设置有上位置检测传感器9和下位置检测传感器10,四个作业吸头对应的每个导向部7上开有光路通过孔71,上位置检测传感器9和下位置检测传感器10发出的光束穿过光路通过孔71。
24.当传感器的光束,穿过所有吸头的透光孔时,正常触发传感器,则表明所有的吸嘴都处于上升ok的状态。
25.当上侧的传感器(上位置检测传感器9)被遮挡,但是下面的传感器(下位置检测传感器10)照常穿过透光孔的话,则说明至少有1个吸嘴处于下降ok的状态,其余不定数量的吸嘴处于上升ok的状态。
26.当下方的传感器(下位置检测传感器10)被遮挡,则说明有至少一个的吸嘴处于中间位置,这个中间位置为卡顿位置,是不被允许需要报警的一个状态。
27.两位置传感器选用ex
‑
13ea或ex
‑
13a。
28.汽配方式原理:
29.调压气路通入压力精调过后的气流压力。一般设定为0.3mpa,即3公斤压力。此处气压是提供一个可以调整的向上的顶升力,确保响应效果。
30.四根驱动气管,分别控制4个气缸的前进方向,该气管内部压力调整为设备原始供压,一般设定为0.5mpa,即5公斤压力。
31.调压气路的内部气压一直会持续供压,且保证在3kg的压力。在四根气管(驱动气管)不供气的时候,作业吸头是一直保持在回缩在上方的状态。当第一驱动气管通入压力时,上方压力为5公斤,大于下方压力的3公斤,因此,气缸会进行下降动作,以此类推。
32.整体清算气管的输入只需要5路气管,减少了气管的数量。且因为上升压力可调,气缸动作的响应效果也有很大程度的保证,相较于单作用气缸的内部反馈弹簧机构有着更有效的动作响应。
33.整体清算气管的输入只需要五路气管,减少了气管的数量,减少气管,这样可以减少由于气管较多而产生的磨损概率,提高气缸响应效果;通过单独的某一路强气压冲击整体的弱气压,达到单个气缸的动作效果。
34.状态判定原理:
35.主要区分为以下几类状态:
36.1)所有的吸嘴是缩回状态,这个是安全规避状态,可以执行任何动作,此时的传感器状态为上位置检测传感器9通过所有吸头所带有的光路通过孔71,呈现触发on信号,下位置检测传感器10全部为未遮挡状态,呈现触发on信号,信号结构为on
‑
on。
37.2)所有的吸嘴或者个别吸嘴为伸出状态,这个状态为气缸动作执行完成状态,可以进行下一步的回缩动作。此时的传感器状态为上位置检测传感器9被至少一个气缸遮挡住,呈现未触发的off信号,下位置检测传感器10会通过下降下来的光路通过孔进行光路通过,此时下位置传感器状态呈现为on信号,信号结构为off
‑
on。
38.3)当有个别吸嘴未到达位置时,既动作停顿在一半是,造成这个的原因一个是因为气缸动作时间周期过长,需要一定时间才能让气缸到达位置,还有一个原因则是气缸卡顿,导致气缸无法到位,这种情况持续时间过长则判定为异常情况,这时候上位置检测传感器9的信号会被遮挡。下位置检测传感器10也会因为光路通过孔为到达位置而迫使下信号传感器光路无法通过,呈现off,信号结构为off
‑
off。此时的信号若超过一定设定时间,则会需要报出报警,进行干预。
39.由上所述,1状态为安全回缩状态,2状态为动作结束状态,3状态为动作执行中状态,依靠两个信号的配合,将原本需要分别两个信号共计8个信号的信息处理,合并为只需要两个信号的处理,减少了信号线的物理排布空间,以及信号点位资源的有效利用。
40.通过外部的整体信号来代替所有气缸的个体状态,提高机械物理上的管线排布效率,提高信号线的排布空间效率,减少信号点位占用,节约点位资源。
41.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1