一种自动装配线机器人用抓持机构的制作方法
1.本实用新型涉及自动装配线机器人用抓持机构技术领域,具体涉及一种自动装配线机器人用抓持机构。
背景技术:
2.装配机器人是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。其中操作机的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等;控制器一般采用多cpu或多级计算机系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感系统用来获取装配机器人与环境和装配对象之间相互作用的信息。
3.现有的自动装配线机器人用抓持机构在夹持过程中由于两个夹臂之间为分分体设置,进而容易受到外界震动影响而导致夹臂的夹持性能不佳,使工件滑落,影响机构使用性能,降低机构实用性,此外,现有的自动装配线机器人用抓持机构在夹持过程中由于无法对夹持的力度进行缓冲,进而在夹持一些精密工件时容易因夹取力度过大而导致工件损坏,影响机构的夹持效果,降低机构功能性。
技术实现要素:
4.(一)要解决的技术问题
5.为了克服现有技术不足,现提出一种自动装配线机器人用抓持机构,解决了现有的自动装配线机器人用抓持机构在夹持过程中由于两个夹臂之间为分分体设置,进而容易受到外界震动影响而导致夹臂的夹持性能不佳,使工件滑落,影响机构使用性能,降低机构实用性,以及现有的自动装配线机器人用抓持机构在夹持过程中由于无法对夹持的力度进行缓冲,进而在夹持一些精密工件时容易因夹取力度过大而导致工件损坏,影响机构的夹持效果,降低机构功能性的问题。
6.(二)技术方案
7.本实用新型通过如下技术方案实现:本实用新型提出了一种自动装配线机器人用抓持机构,包括支架、连接盘、安装盘和电机,所述支架底端固定有所述连接盘,所述连接盘底端设置有所述安装盘,所述支架顶端内壁上安装有所述电机,所述安装盘底壁上设置有凹腔,所述凹腔内设置有电动转轴,所述电动转轴一侧壁上设置有转动夹臂,所述转动夹臂一侧设置有固定夹臂,所述转动夹臂底端一侧设置有弹簧,所述弹簧一端固定有连接板,所述连接板以及所述固定夹臂一侧壁上均固定有垫块,所述转动夹臂一侧壁上固定有电动推杆,所述电动推杆一端设置有磁板,所述固定夹臂一侧壁上设置有连接杆,所述连接杆一端设置有电磁铁。
8.进一步的,所述支架与所述连接盘焊接,所述安装盘与所述连接盘转动连接。
9.通过采用上述技术方案,所述支架、所述连接盘以及所述安装盘组成机构的基本结构。
10.进一步的,所述电机与所述支架通过螺栓连接,所述电机与所述安装盘键连接,所述电机的输出轴贯穿所述连接盘。
11.通过采用上述技术方案,所述电机带动所述安装盘转动,进而对夹持的角度进行调节。
12.进一步的,所述凹腔成型于所述安装盘上,所述电动转轴与所述凹腔转动连接,所述转动夹臂与所述电动转轴通过螺钉连接,所述固定夹臂与所述安装盘通过螺栓连接。
13.通过采用上述技术方案,所述电动转轴带动所述转动夹臂向外转动,使工件处于所述固定夹臂与所述转动夹臂之间,然后所述电动转轴再带动所述转动夹臂向内转动,进而配合所述固定夹臂对工件进行夹取。
14.进一步的,所述弹簧与所述转动夹臂以及所述连接板均焊接。
15.通过采用上述技术方案,在夹持过程中,所述弹簧与所述连接板相结合可对夹持力度进行缓冲,进而防止因夹持力度过大而对工件造成损坏,保证机构的夹持效果,提高机构功能性。
16.进一步的,所述垫块与所述连接板以及所述固定夹臂均通过螺钉连接。
17.通过采用上述技术方案,所述垫块可增大夹持臂与工件之间的摩擦力。
18.进一步的,所述电动推杆与所述转动夹臂通过螺钉连接,所述磁板与所述电动推杆通过螺钉连接,所述连接杆与所述固定夹臂通过螺钉连接,所述电磁铁与所述连接杆通过螺钉连接。
19.通过采用上述技术方案,在夹持过程中,所述电动推杆推动所述磁板与所述电磁铁接触,并使所述电磁铁通电,进而通过两者的吸附将所述固定夹臂与所述转动夹臂连接为一体,防止因受到外界震动影响而导致夹臂的夹持性能不佳,保证工件夹持的稳定性,保证机构使用性能,提高机构实用性。
20.(三)有益效果
21.本实用新型相对于现有技术,具有以下有益效果:
22.1、为解决现有的自动装配线机器人用抓持机构在夹持过程中由于两个夹臂之间为分分体设置,进而容易受到外界震动影响而导致夹臂的夹持性能不佳,使工件滑落,影响机构使用性能,降低机构实用性的问题,本实用新型通过设置电动推杆、磁板和电磁铁,在夹持过程中,电动推杆推动磁板与电磁铁接触,并使电磁铁通电,进而通过两者的吸附将固定夹臂与转动夹臂连接为一体,防止因受到外界震动影响而导致夹臂的夹持性能不佳,保证工件夹持的稳定性,保证机构使用性能,提高机构实用性;
23.2、为解决现有的自动装配线机器人用抓持机构在夹持过程中由于无法对夹持的力度进行缓冲,进而在夹持一些精密工件时容易因夹取力度过大而导致工件损坏,影响机构的夹持效果,降低机构功能性的问题,本实用新型通过设置弹簧和连接板,在夹持过程中,弹簧与连接板相结合可对夹持力度进行缓冲,进而防止因夹持力度过大而对工件造成损坏,保证机构的夹持效果,提高机构功能性。
附图说明
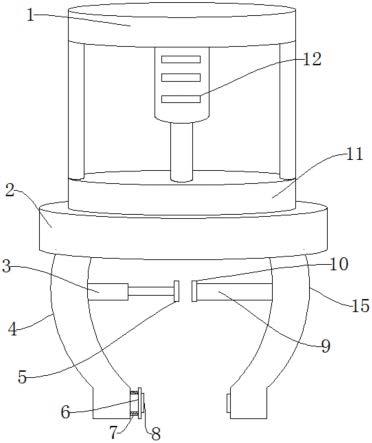
24.图1是本实用新型所述一种自动装配线机器人用抓持机构的结构示意图;
25.图2是本实用新型所述一种自动装配线机器人用抓持机构中安装盘的仰视图。
26.附图标记说明如下:
27.1、支架;2、安装盘;3、电动推杆;4、转动夹臂;5、磁板;6、连接板;7、弹簧;8、垫块;9、连接杆;10、电磁铁;11、连接盘;12、电机;13、凹腔;14、电动转轴;15、固定夹臂。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.如图1-图2所示,本实施例中的一种自动装配线机器人用抓持机构,包括支架1、连接盘11、安装盘2和电机12,支架1底端固定有连接盘11,连接盘11底端设置有安装盘2,支架1、连接盘11以及安装盘2组成机构的基本结构,支架1顶端内壁上安装有电机12,电机12带动安装盘2转动,进而对夹持的角度进行调节,安装盘2底壁上设置有凹腔13,凹腔13内设置有电动转轴14,电动转轴14一侧壁上设置有转动夹臂4,转动夹臂4一侧设置有固定夹臂15,电动转轴14带动转动夹臂4向外转动,使工件处于固定夹臂15与转动夹臂4之间,然后电动转轴14再带动转动夹臂4向内转动,进而配合固定夹臂15对工件进行夹取,转动夹臂4底端一侧设置有弹簧7,弹簧7与连接板6相结合可对夹持力度进行缓冲,进而防止因夹持力度过大而对工件造成损坏,保证机构的夹持效果,提高机构功能性,弹簧7一端固定有连接板6,连接板6以及固定夹臂15一侧壁上均固定有垫块8,垫块8可增大夹持臂与工件之间的摩擦力,转动夹臂4一侧壁上固定有电动推杆3,电动推杆3一端设置有磁板5,固定夹臂15一侧壁上设置有连接杆9,连接杆9一端设置有电磁铁10,在夹持过程中,电动推杆3推动磁板5与电磁铁10接触,并使电磁铁10通电,进而通过两者的吸附将固定夹臂15与转动夹臂4连接为一体,防止因受到外界震动影响而导致夹臂的夹持性能不佳,保证工件夹持的稳定性,保证机构使用性能,提高机构实用性。
30.如图1-图2所示,本实施例中,支架1与连接盘11焊接,安装盘2与连接盘11转动连接,电机12与支架1通过螺栓连接,电机12与安装盘2键连接,电机12的输出轴贯穿连接盘11,凹腔13成型于安装盘2上,电动转轴14与凹腔13转动连接,转动夹臂4与电动转轴14通过螺钉连接,固定夹臂15与安装盘2通过螺栓连接。
31.如图1-图2所示,本实施例中,弹簧7与转动夹臂4以及连接板6均焊接,垫块8与连接板6以及固定夹臂15均通过螺钉连接,电动推杆3与转动夹臂4通过螺钉连接,磁板5与电动推杆3通过螺钉连接,连接杆9与固定夹臂15通过螺钉连接,电磁铁10与连接杆9通过螺钉连接。
32.本实施例的具体实施过程如下:首先将机构安装机械臂上,在机构使用过程中,电动转轴14带动转动夹臂4向外转动,使工件处于固定夹臂15与转动夹臂4之间,然后电动转轴14再带动转动夹臂4向内转动,进而配合固定夹臂15对工件进行夹取,在夹取过程中,弹簧7与连接板6相结合可对夹持力度进行缓冲,进而防止因夹持力度过大而对工件造成损坏,保证机构的夹持效果,提高机构功能性,同时垫块8可增带夹持臂与工件之间的摩擦力,接着通过电动推杆3推动磁板5与电磁铁10接触,并使电磁铁10通电,进而通过两者的吸附将固定夹臂15与转动夹臂4连接为一体,防止因受到外界震动影响而导致夹臂的夹持性能不佳,保证工件夹持的稳定性,保证机构使用性能。
33.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1