一种茶杯上下料生产系统的制作方法
1.本实用新型涉及一种茶杯上下料生产系统。
背景技术:
2.参见图1,其为一种茶杯,该茶杯(n)具有杯体(n-1)和杯柄(n-2)。而该茶杯(n)在生产过程中需要进行清洗工序、内壁上釉工序等处理。而现有每个工序是单独处理工作,同时相互之间没有形成连续自动化的生产线,同时也需要在每个工序人工进行将杯子上下料操作,存在工作效率低,人工成本高等问题。
技术实现要素:
3.为了解决现有技术中存在的上述一个或多个缺陷问题,本实用新型提供了一种茶杯上下料生产系统。
4.为实现上述目的,本实用新型提供了一种茶杯上下料生产系统,其特征在于,包括机架、输送带、四轴机械手和茶杯放置托盘;该输送带用于茶杯水平输送;该茶杯放置托盘水平设置在机架上且位于所述输送带中部的旁侧;该茶杯放置托盘上具有用于茶杯放置的放置凹槽;该四轴机械手设置在机架上,该四轴机械手的手臂末端安装有夹爪,该夹爪用于夹持茶杯;该四轴机械手用于驱动夹爪位移,且既可将输送带上的茶杯上料到茶杯放置托盘的放置凹槽内,又能将茶杯放置托盘的放置凹槽内的茶杯下料到输送带上。
5.优选地,所述夹爪采用三指夹爪或三爪卡盘。
6.优选地,所述输送带上方设置有两个导向杆,该两个导向杆之间形成供茶杯导向运动的导向通道。
7.优选地,所述放置凹槽包括用于茶杯的杯体容置的杯体容置腔、用于茶杯的杯柄容置的杯柄容置腔及用于夹爪的爪部容置的爪部容置腔;该爪部容置腔和杯柄容置腔与杯体容置腔连通为一体。
8.优选地,所述四轴机械手采用ls20-804型号。其可采用由爱普生(中国)有限公司生产或销售。
9.优选地,所述三爪卡盘采用mhs3-63d型号。其可采用上海艾佑工业自动化设备有限公司生产或销售。
10.优选地,所述茶杯放置托盘上的放置凹槽具有多个且呈矩形阵列分布。
11.本实用新型的有益效果:
12.本实用新型具有以下特点并分析如下:
13.第一、本实用新型通过输送带、夹爪及四轴机械手的相互配合而实现茶杯上工序、当前工序上下料及下工序之间的自动上下料及依次输送工作,以达到流水线生产目的,可替代多人工搬运,大大提升效率,可降低人工成本;
14.第二、本实用新型由于输送带输送的茶杯沿两个导向杆之间所形成的导向通道导向运动,可防止偏向运动,可保证上料时可被精准抓取;
15.第三、本实用新型由于该茶杯在该放置凹槽内,其杯体和杯柄分别定位,该茶杯在该放置凹槽内不会旋转和倾倒,保证当前工序在处理时能保持状态稳定;
16.第四,本实用新型由于该爪部容置腔用于夹爪的爪部在进入而避位,可实现低位放置,避免茶杯高位放置而摔坏,同时可方向修正,使茶杯的杯柄能对准杯柄容置腔进入放置,因此可实现低位安全和确保定向精确放置。
附图说明
17.图1是一种茶杯的结构示意图。
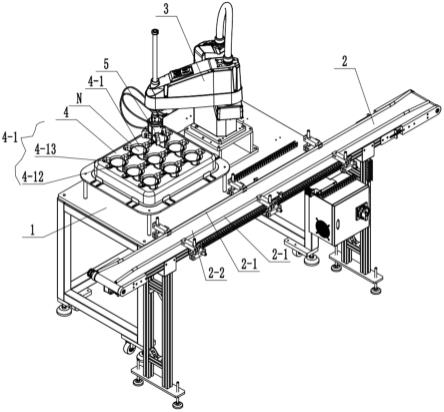
18.图2-4是本实用新型一种茶杯上下料生产系统的结构示意图。
19.图5-6是本实用新型中茶杯放置托盘的的结构示意图。
20.图7是本实用新型一种茶杯上下料生产系统的第一种使用方式时的工作状态俯视图。
21.图8是本实用新型一种茶杯上下料生产系统的第二种使用方式时的工作状态俯视图。
具体实施方式
22.下面结合附图和实施例对本实用新型作进一步说明:
23.实施例:可参见图2-6,一种茶杯上下料生产系统,其包括机架1、输送带2、四轴机械手3和茶杯放置托盘4。
24.该输送带2用于茶杯n水平输送。
25.该输送带2被电机驱动,该电机与控制器电连接。
26.该茶杯放置托盘4水平设置在机架1上且位于所述输送带2中部的旁侧;该茶杯放置托盘4上具有用于茶杯n放置的放置凹槽4-1。
27.该四轴机械手3设置在机架1上,该四轴机械手3的手臂末端安装有夹爪5;该夹爪5用于夹持茶杯n;该四轴机械手3用于驱动夹爪5位移,既可将输送带2上的茶杯n移送到所述放置凹槽4-1内,同时又可使所述所述茶放置凹槽4-1内的茶杯n移送到所述输送带2上。
28.优选地,所述夹爪5采用三指夹爪或三爪卡盘。
29.在本实施例中,优选地,所述四轴机械手3采用ls20-804型号。其可采用由爱普生中国有限公司生产或销售。
30.优选地,所述输送带2上方设置有两个导向杆2-1,该两个导向杆2-1之间形成供茶杯n导向运动的导向通道2-2。该输送带2在输送茶杯n时,该茶杯n沿导向通道2-2导向运动,可防止偏向运动,因此可保证能准确被精准抓取。
31.在本实施例中,优选地,所述三爪卡盘采用mhs3-63d型号。其可采用上海艾佑工业自动化设备有限公司生产或销售。
32.在本实施例中,所述放置凹槽4-1包括用于茶杯n的杯体n-1容置的杯体容置腔4-11、用于茶杯n的杯柄n-2容置的杯柄容置腔4-12及用于夹爪5的爪部容置的爪部容置腔4-13;该爪部容置腔4-13和杯柄容置腔4-12与杯体容置腔4-11连通为一体。
33.由于采用三爪卡盘同心夹紧,该三爪卡盘具有三个爪部,该放置凹槽4-1具有周向均匀分布的三个爪部容置腔4-13。由于采用三爪卡盘同心夹紧,可保证该茶杯n夹紧后的中
心精准,同时该茶杯n在该放置凹槽4-1内,其杯体n-1和杯柄n-2分别定位,该茶杯n在该放置凹槽4-1内不会旋转和倾倒,保证当前工序在处理时能保持状态稳定。另外该爪部容置腔4-13用于夹爪5的爪部3-1在进入而避位,可实现低位放置,避免茶杯n高位放置而摔坏,同时可方向修正,使茶杯n的杯柄n-2能对准杯柄容置腔4-12进入放置,因此可实现低位安全和确保定向精确放置。
34.在本实施例中,所述茶杯放置托盘4上的放置凹槽4-1具有多个且呈矩形阵列分布。因此可在当前工序同时处理若干个茶杯n。
35.在工作时,该茶杯上下料生产系统可设置在当前工序《清洗工序配置冲洗设备或/内壁上釉工序配置上釉设备》处,而该输送带2上游侧与上工序连接,而该输送带2下游侧与下工序连接,而输送带2用于将上工序处理的茶杯n朝向下工序输送(可参见图7-8)。
36.当输送带2将上游侧的茶杯输送到其中部处的抓取位置时暂停后,再通过启动该四轴机械手3工作并将夹爪5位移到输送带2中部的抓取位置处,然后再启动夹爪5工作并将上工序输送过来并位于输送带2中部处的茶杯n夹持夹紧;然后再启动该四轴机械手3工作并将夹爪5所夹持的茶杯n移送上料到所茶杯放置托盘4的其中一个放置凹槽4-1内,然后再启动夹爪5工作并松开茶杯n,该茶杯n会留在该放置凹槽4-1内,可实现自动上料。然后启动该四轴机械手工作并将夹爪位移到初始安全位置或再返回输送带的中部处的抓取位置再抓取下一个茶杯n(而当输送带2上的茶杯被夹持带走后,可再启动该输送带2工作再继续将上游侧的茶杯输送到其中部处的抓取位置后暂停并等待下一次夹持上料),并重复上料工作。当上料完成后再进行执行当前工序处理(启动清洗设备清洗工作或启动上釉设备进行内壁上釉工作)工作。
37.而当该茶杯放置托盘4上的茶杯n完成了当前工序《清洗处理或上釉处理》处理后,可再启动该四轴机械手3工作并将夹爪5位移到所述放置凹槽4-1处,该夹爪5的三个爪部进入该放置凹槽4-1的三个爪部容置腔4-13内,再启动夹爪5工作并将该放置凹槽4-1内的茶杯n同心夹紧,然后再通过启动四轴机械手3工作并带动夹爪5移送下料到输送带2上,然后再启动该夹爪5工作并松开茶杯n,该茶杯n会被落放并回到输送带上,然后启动该四轴机械手3工作并将夹爪5位移到初始安全位置或返回该茶杯放置托盘4上再抓取下一个放置凹槽4-1内的茶杯n,而可通过启动该输送带2工作而将已完成当前处理并返回的茶杯n朝向下工序输送。因此本实用新型可通过相互配合实现将茶杯n在上工序、当前工序上下料及下工序之间流水线生产,因此替代人工搬运、上下料操作、大大提升效率,可降低人工成本。
38.而由于上料后,由于该茶杯n在放置凹槽4-1内被精准定位,可保证在在处理过程中保持状态稳定,而不会翻转,避免损坏,同时也能确保被对准处理。
39.另外,在该输送带2中部的抓取位置处可设置有传感器2-3(如光电开关),并用于检测茶杯n到位信号。其中传感器2-3、输送带2的驱动电机、四轴机械手3及夹爪5是与控制器电连接。而当传感器检测到茶杯n到位信号时控制器控制该输送带2的驱动电机停止工作,然后启动四轴机械手3工及夹爪5执行抓取上料工作)。
40.另外,由于该茶杯放置托盘4上的各放置凹槽4-1呈矩形阵列分布,方便设定四轴机械手3的运动轨迹和上下料坐标。
41.另外,该机架1上固定设置有工位台1-1,该茶杯放置托盘4平放在工位台1-1上,该工位台1-1上固定有若干绕茶杯放置托盘4周向分布并对其周向限位的l型限位板1-2。
42.优选地,该l型限位板1-2通过螺栓1-3固定在工位台1-1上,可保证杯放置托盘4在工位台1-1定位固定后被牢固限位,同时不会周向松动,保证该杯放置托盘4上的各放置凹槽4-1位置坐标的精准稳定性,可保证上料精准放入和下料精准抓取带走。
43.当该上工序或/和下工序不采用茶杯放置托盘4放置处理时,可采用图7的方式布局。
44.而当该上工序、当前工序,下工序都采用茶杯放置托盘4放置处理时,可采用图8的方式布局。
45.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1