容器处理系统的制作方法
本发明涉及用于处理容器的系统、供应库存的方法及其系统的用途。
背景技术:
1、在过去20年中,因互联网及智能手机使用的指数级增长促使电子商务出现了惊人的增长,这使得产品从零售经营者转移至终端顾客的方式发生了重大变化。
2、数十年来这都是通过传统方式完成的,成盘的商品从生产场所或批发商转移至零售商的仓库。之后,产品通常以混合货盘的形式(即由盒子制成货盘,每个盒子包含独特的库存单元(sku))被转送至商店。在商店处,货盘被拆分开,而盒子被存储进商店的仓库中。最后,产品被放在商店的货架上供顾客选取。
3、电子商务的突然出现已经扰乱了这种持续数十年的产品分发模式,现在零售商必须完成物品拣选和包装以将订购物品最终交付给顾客。
4、分发模式中的这些巨大改变已经大幅增加了拣选和包装成本,原因是物品拣选的工作量远高于货盘或盒子拣选。另外,在仓库中处理盒子和容器更加频繁和复杂。由于顾客非常不情愿在线上购买商品时支付更高的价格,这些成本通常由零售商承担。
5、该问题对于百货电子商务来说甚至更严重,而百货电子商务是零售市场的最大部分(全部零售市场的40%至50%),原因是:
6、- 每笔线上订单的物品平均数量远高于零售业其余部分(每笔平均线上订单约50项物品)。
7、- 额外需要维持用于易变质物品的多温度区域。
8、- 最后,百货业利润极低(通常<2%),这使得该行业很难吸收在用于降低拣选、包装和运送成本的基础设施中所需的投资并使线上百货能享受正向的盈亏底线。
9、所有以上这些困难都已经成为产生基于也配有容器处理系统的自主机器人载具的创新材料处理系统的动力。这些复合型机器能够在仓库的走廊中自由地游走、从货架取回装有产品的容器、将它们暂时存储在车载存储架上并将它们转移至仓库中的指定地点进行进一步处理(wo2017/121747、wo2018/234155),而例如us201514719196中所描述的其它系统建议了类似的系统但只能一次承载一个容器。
10、这些常规系统的主要缺点在于它们所建议的机器人机器可与容器互动(取回或存储),这些容器可从货架前方的走廊直接存取。而这样做的缺点在于仓库的大量区域应被用作走廊,从而减少了能被用于放置/存储容器的区域。
11、这些常规系统的另一个缺点是自主移动机器人(amr)单元以及容器处理系统被牢固地栓接在同一平台上,而只要这些部件之一处于处理中,其他部件就得保持不活动状态,这就限制了各个部件的利用时间。举例而言,当自主移动机器人的电池需要在电池充电站保持连接时,容器处理系统就得同时保持不活动状态。在其它示例中,当该系统需要停靠在配送站并向操作者提供库存供货容器时,因为只要该任务仍在进行,该机器的自主移动机器人就得保持在该站点无法活动。另外,如果任一部件失灵,那么另一部件也无法正常运作,这构成了单点失效系统。
12、其它系统,例如ep0235488和ep0458722所描述的系统,教导了在其所有部件方面更加缺少灵活性的机器人机器,即自主移动机器人、容器处理系统和存储架都被牢固地栓接在同一平台上。
13、us2017330269a1公开了利用货柜中的移动机器人单元(mrus)管理库存载体的方法,该货柜被配置为在补货站接收线上订单以供顾客在交付站提取。此种方法包括通过移动机器人单元接收识别第一库存载体的指令、将该移动机器人单元移动至已识别库存载体所在位置并利用该移动机器人单元将该已识别库存载体运输至补货站供交付载具提取。
14、us10029851b1描述了具有多个库存托架和用于移动库存托架的驱动单元的库存系统。该文献公开了库存系统利用容器和/或其它功能件运作以辅助分离自动化和手动库存物品处理,如通过人类操作者来运送待从容器释放的库存物品或通过机械臂来运送待从容器释放的库存物品。
15、wo2017197285a1公开了用于通过完全无人系统来向顾客交付线上订单的方法。此种方法包括通过利用承载容器的库存载体经由补货口对货柜补货,在温度适当的房间中移动附接至带有移动机器人单元的载体底座的库存载体。另外,该方法包括在迷你载货站转移库存载体并将订单容器装载在交付载体上。该方法进一步包括转移交付载体并将其附接至交付口,从而使顾客在验证后能够拉出抽屉并提取订购物品。
16、wo2019083199a1描述了商品转移系统,其将利用机器人的自主组合提取和分类运做模型(operation model)和运做方法(operation methodology)结合在一起。根据该文献的商品转移系统包括包含装有商品的复数个分区的至少一个运输车和能够移动装载在运输车上的商品的提取机器人,其中提取机器人接收关于分派给所述复数个分区的商品的信息并重新放置商品或补充短缺商品。
17、需要一种完全自动化的系统,其具有一个或一个以上自主移动机器人,能够辅助实现所有必需的处理从而以最优的方式处理顾客线上下的订单。
技术实现思路
1、本发明属于用于处理容器的系统和用于将库存物品供应至仓库中的配送站或发生如百货订单的订单配送或订单交付的任何其它地点的方法,以及该系统的用途。
2、根据本发明的各个方面,提供了用于处理容器的系统,所述系统包括用于存储容器的至少一个移动库存载体、包括用于从所述至少一个移动库存载体提取或释放容器的抓取机构的迷你装载系统、至少一个自主移动机器人单元,其中所述迷你装载系统、所述至少一个移动库存载体和所述至少一个自主移动机器人单元是不同的单元并且彼此独立运作。
3、在本发明的其它方面,所述至少一个移动库存载体被自由安装在工作场所中并且所述至少一个自主移动机器人单元被配置为抬升和/或旋转所述移动库存载体。
4、根据本发明的其它方面,所述至少一个自主移动机器人单元被配置为在工作场所内运送所述至少一个移动库存载体。
5、在其它方面,所述迷你装载系统包括基座,所述至少一个移动库存载体被附接在所述基座上并且所述至少一个自主移动机器人单元被配置为在工作场所内一起移动所述迷你装载系统和所述至少一个移动库存载体。
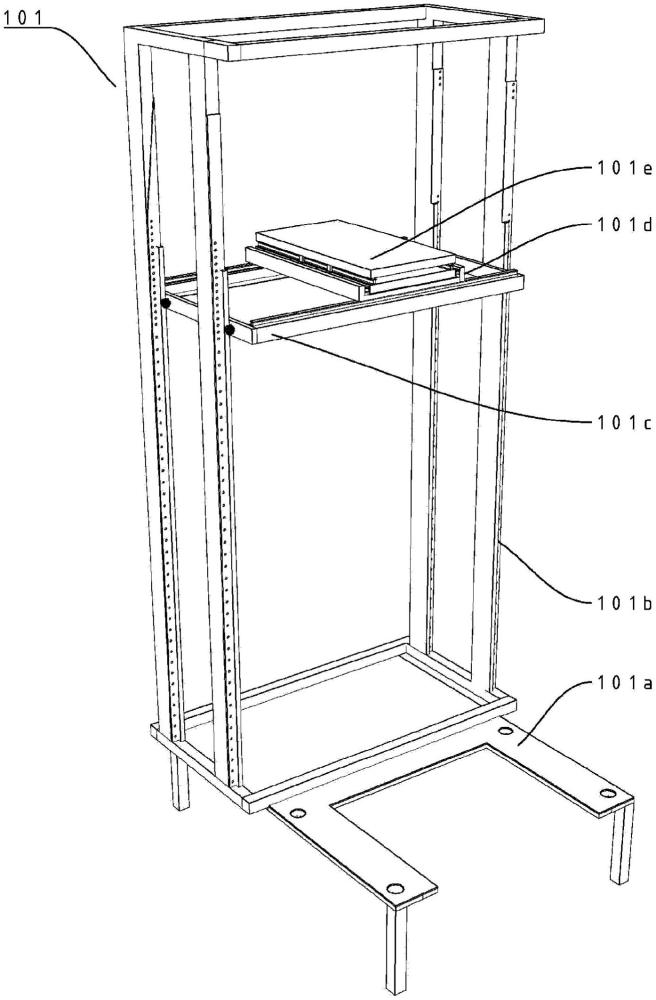
6、在其它方面,所述迷你装载系统包括龙门式系统,所述龙门式系统包括龙门式框架、用于在z轴和x轴上移动的成对龙门式接头和能够在y轴上移动也能在xy平面上旋转的容器处理器(101e)。
7、在其它方面,所述迷你装载系统的所述抓取机构包括至少一个摄像头和至少一个照明工具,其被配置为识别移动库存载体107的角度和/或直线偏离从而引导所述成对龙门式接头(101c、101d)和所述容器处理器(101e)的移动。在其它方面,所述至少一个摄像头和所述至少一个照明工具被配置为生成流媒体视频。
8、在其它方面,所述至少一个移动库存载体由自主移动机器人单元抬升并被放在龙门式迷你装载机的基座上。然后,所述自主移动机器人单元能够在下方推进,抬升所述迷你装载机和所述至少一个移动库存载体并在工作场所内移动它们。
9、在其它方面,第一基座包括轨道和连接至轨道的一个或一个以上轮。
10、在本发明的其它方面,所述自主移动机器人单元是无线的并且包括集成可充电电池。
11、在本发明的其它方面,所述自主移动机器人单元的电池为所述迷你装载系统供电。
12、根据本发明的其它方面,为配送站提供了供应库存物品的方法,该方法包括以下步骤:
13、a) 通过第一自主移动机器人单元将带有一个或一个以上已装填供货容器的第一移动库存载体从配送中心的库存区域运送至交换点;
14、b) 通过迷你装载机将所述第一移动库存载体的所述一个或一个以上供货容器装载至放在所述迷你装载系统(101)的基座上的第二移动库存载体,所述第二移动库存载体在装载前是空的;
15、c) 重复步骤a和b直至所述第二移动库存载体完全装满供体库存容器;
16、d) 通过自主移动机器人单元将所述已装载第二移动库存载体运送至配送中心的提取站;
17、e) 将所述第二移动库存载体转移至服务于提取站的迷你装载机的基座上;
18、f) 通过所述迷你装载机的抓手从所述第二移动库存载体选定第一供货容器并将所述第一供货容器交付给操作者;
19、g) 所述操作者从所述第一供货容器选定至少一个物品并将其放入订单容器中,
20、其中,重复步骤f和g直至所述操作者从所有所述供货容器选定物品并将它们放入指定订单容器中。
21、在本发明的其它方面,用于供应库存物品的方法包括以下步骤:到达配送中心的提取站的自主移动机器人单元,
22、- 所述第二移动库存载体被所述自主移动机器人单元从服务于所述提取站的迷你装载机基座抬升;
23、- 所述自主移动机器人单元将所述第二移动库存载体送回至所述配送中心的所述库存区域并将其放在另一个迷你装载系统的基座上。
24、在本发明的其它方面,所述自主移动机器人在未参与处理时或其电池已降低至极低水平时自动前往充电站进行充电。
25、在其它具体实施方式中,提供了用于处理容器的系统在配送中心中的用途。
26、具有彼此独立运作的不同单元的第一个效果在于实现了对每个部件和所有部件的更多的利用,并避免了单点失效,因为如果该系统的任何部件失灵,它可以被另一个相似部件所替换并与其它两个部件一起顺利运作。因此,一个单元失灵不一定非要使该系统的其它部件停止工作。另外,当自主移动机器人单元对其电池充电时不会阻碍迷你装载机在充电进行期间的运作。
27、另外,当移动库存载体需要从运作区域内的a点转移至b点时,仅需要自主移动机器人单元来进行该运作。同时,迷你装载系统可在另一地点并行运作,例如在处理供货容器的提取站,或与另一个自主移动机器人单元一起工作以进行所设定的处理之一。
28、系统的主要部件,即自主移动机器人单元、迷你装载机和移动库存载体,的这种运作自由提高了利用率,导致给定水平的吞吐量的资源需求降低。
29、除此之外,系统的大量平行运作极大地减少了机器失灵而导致的临时关机。能持续运作是有利的,原因是单点失效传统系统中出现的临时关机可能导致订单交付显著延迟并可能强制激活进一步的人力资源,从而导致整体成本增加以及不可靠的系统质量。
30、本发明所描述的“容器”一词应当由本领域技术人员解释为包括适于盛放库存的各种物体选项,例如可以是但不限于普通托盘或托盘与盒子的组合或德基特(dekit)储物箱。
31、因此可以理解,根据本发明的系统使得整个系统包括的每个和所有特定部件都得到高得多的利用率,这导致与之前提及的常规系统所建议的机器相比需要的资源更少。
32、在本发明中公开的用于处理容器的系统所能实现的另一个效果是该系统在仓库中有效运作,在该仓库中库存存储在供货容器中,而供货容器存储在能够被移动的库存载体上,此类移动库存载体被附接在基座上,使得自主移动机器人单元能在下方推进、将其抬升并使其转向或将其从运作区域内的a点移动至b点。在现有技术水平系统(如wo2017/121747)中,库存载体被固定附接(如栓接)至工作场所的地面而它们的抓取机构能够经由工作场所的走廊取回可直接存取的库存。这使得那些系统具有需要更多空间用于同等的库存存储。
33、另外,由于系统的各种单元是不同且可拆分的,移动库存载体可以密集得多的方式(例如背靠背)被存储。这意味着与常规系统所需的存储区域相比需要更少的存储区域来存储相似数量的库存,原因是前者仅能够操作可从走廊直接存取的容器,导致考虑使用常规系统时需要更大数量的走廊。
34、除此之外,当根据本发明的自主移动机器人单元必须例如从工作场所的a点移动到b点时,它们可以利用经由走廊或在移动库存载体的基座下方的路径推进。这导致走廊不会那么拥挤,这意味着可以适用高效得多的路径规划,其最终减少了与常规系统相比同等吞吐量所需的自主移动机器人单元的数量。
35、权利要求书中所主张的本发明所公开的系统允许以更大的密度布置库存载体,其最终导致同等存储所需的空间更少。
- 还没有人留言评论。精彩留言会获得点赞!