一种多关节机械手及码垛设备的制作方法
1.本发明涉及堆垛设备技术领域,尤其是指一种多关节机械手及码垛设备。
背景技术:
2.在不同的行业中,为了提高工作效率和质量,减少人员数量,降低人工成本,逐渐采用机器换人的生产模式,机械手的使用逐年增加,使得机械手的种类繁多,各式各样。但是现有技术中的机械手的转动角度局限,且容易出现奇异点,使得机械手经常出现异常的现象,难以满足用户所需机械手完成的各种动作。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现要素:
3.为了解决上述技术问题,本发明的目的在于提供一种多关节机械手及码垛设备。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种多关节机械手,其包括安装座、第一关节、第二关节、第三关节、第四关节、第五关节、第六关节、第七关节、第一机臂、第二机臂及执行单元,所述第一关节的输出端与安装座固定连接,所述第一关节的主体与安装座转动连接,所述第二关节的输出端与第一关节的主体固定连接,所述第二关节的主体与第一关节的主体转动连接,所述第一关节的轴线与第二关节的轴线垂直,所述第二关节的主体与第一机臂的一端连接,所述第一机臂的另一端与第三关节的主体连接,所述第二关节的轴线和第三关节的轴线均与第一机臂的轴线垂直,所述第三关节的输出端与第四关节固定连接,所述第四关节与第三关节的主体同轴地转动连接,所述第二机臂的一端与第四关节连接,所述第二机臂的另一端与第五关节的主体连接,所述第四关节的轴线和第五关节的轴线均与第二机臂的轴线垂直,所述第五关节的输出端与第六关节的主体固定连接,所述第六关节的主体与第五关节的主体转动连接,所述第六关节的轴线与第五关节的轴线垂直,所述第六关节的输出端与第七关节的主体固定连接,所述第六关节的主体与第七关节的主体转动连接,所述第六关节的轴线与第七关节的轴线垂直,所述执行单元装设于第七关节的输出端。
6.进一步地,所述第三关节、第五关节、第六关节或第七关节包括壳体、减速器、传动组件及电机,所述壳体设置有容置腔及与容置腔连通的开口,所述电机和传动组件均容设于容置腔内,所述减速器嵌装于开口处并遮盖开口,所述传动组件包括主动轮、从动轮及传动带,所述主动轮套装于电机的输出轴外,所述从动轮套装于减速器的输入端,所述传动带套设于主动轮和从动轮外。
7.进一步地,所述第三关节的结构、第五关节的结构、第六关节的结构和第七关节的结构相同。
8.进一步地,所述减速器的主轴的轴向开设有第一过线孔,所述壳体装设有固定板,所述固定板位于容置腔内,所述电机装设于固定板,所述固定板设置有与第一过线孔同轴连通的第二过线孔。
9.进一步地,所述壳体装设有过线件,所述过线件位于容置腔内,所述过线件设置有一个或多个第三过线孔。
10.进一步地,所述壳体包括中空壳身及盖设于中空壳身的一端的封盖,所述封盖与中空壳身围设成容置腔,所述中空壳身的另一端为开口,所述封盖的外侧壁设置有散热结构。
11.进一步地,所述减速器的外侧壁经由密封结构与壳体的内壁密封连接。
12.进一步地,所述减速器的输出端设置有连接环。
13.进一步地,所述执行单元包括与第七关节的输出端连接的连接件、连接于连接件的吸料件及设置于吸料件的吸料面的缓冲垫,所述缓冲垫设置有与吸料件连通的多个吸孔。
14.本发明还提供一种码垛设备,包括上述的多关节机械手。
15.本发明的有益效果:通过第一关节、第二关节、第三关节、第四关节、第五关节、第六关节、第七关节、第一机臂、第二机臂及执行单元的合理布局,使得多关节机械手的动作灵活,可以任意角度进行旋转,以能够完成所需动作,在工作区域内不会出现奇异点,避免了多关节机械手及码垛设备出现异常的情况,工作稳定性好。
附图说明
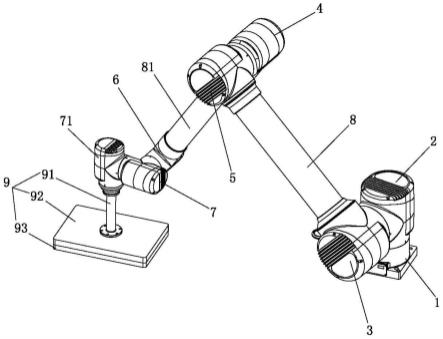
16.图1为本发明的多关节机械手的立体结构示意图。
17.图2为本发明的第三关节、第五关节、第六关节或第七关节的剖视图。
18.图3为本发明的第三关节、第五关节、第六关节或第七关节的分解结构示意图。
19.附图标记说明:
20.1、安装座;2、第一关节;3、第二关节;4、第三关节;41、壳体;411、中空壳身;412、封盖;413、散热结构;42、减速器;421、连接环;43、主动轮;44、电机;45、容置腔;46、从动轮;47、第一过线孔;48、固定板;481、过线件;482、第三过线孔;49、第二过线孔;5、第四关节;6、第五关节;7、第六关节;71、第七关节;8、第一机臂;81、第二机臂;9、执行单元;91、连接件;92、吸料件;93、缓冲垫。
具体实施方式
21.为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
22.如图1至图3所示,本发明提供的一种多关节机械手,其包括安装座1、第一关节2、第二关节3、第三关节4、第四关节5、第五关节6、第六关节7、第七关节71、第一机臂8、第二机臂81及执行单元9,所述第一关节2的输出端与安装座1固定连接,所述第一关节2的主体与安装座1转动连接,所述第二关节3的输出端与第一关节2的主体固定连接,所述第二关节3的主体与第一关节2的主体转动连接,所述第一关节2的轴线与第二关节3的轴线垂直,所述第二关节3的主体与第一机臂8的一端连接,所述第一机臂8的另一端与第三关节4的主体连接,所述第二关节3的轴线和第三关节4的轴线均与第一机臂8的轴线垂直,所述第三关节4的输出端与第四关节5固定连接,所述第四关节5与第三关节4的主体同轴地转动连接,所述第二机臂81的一端与第四关节5连接,所述第二机臂81的另一端与第五关节6的主体连接,
所述第四关节5的轴线和第五关节6的轴线均与第二机臂81的轴线垂直,所述第五关节6的输出端与第六关节7的主体固定连接,所述第六关节7的主体与第五关节6的主体转动连接,所述第六关节7的轴线与第五关节6的轴线垂直,所述第六关节7的输出端与第七关节71的主体固定连接,所述第六关节7的主体与第七关节71的主体转动连接,所述第六关节7的轴线与第七关节71的轴线垂直,所述执行单元9装设于第七关节71的输出端。具体地,所述第四关节5可以采用连接结构,所述第一关节2和第二关节3可以采用现有技术中的转动机构,在此不再赘述。
23.在实际应用中,第一关节2的主体能够相对安装座1360
°
旋转并带动所有的关节和机臂同步转动,第二关节3的主体能够相对第一关节2主体360
°
旋转并带动除了第一关节2以外的其余关节和机臂同步转动,第三关节4驱动第四关节5连带第一机臂8转动,第五关节6驱动第六关节7连带第七关节71和执行单元9转动,第六关节7驱动第七关节71连带执行单元9转动,第七关节71驱动执行单元9360
°
旋转,执行单元9执行预设动作;在执行工作时,第一关节2、第二关节3、第三关节4、第五关节6、第六关节7和第七关节71在控制系统的程序控制下协同配合工作,以完成所需动作。第一机臂8和第二机臂81延长了多关节机械手的行程,通过第一关节2、第二关节3、第三关节4、第四关节5、第五关节6、第六关节7、第七关节71、第一机臂8、第二机臂81及执行单元9的合理布局,使得多关节机械手的动作灵活,可以任意角度进行旋转,以能够完成所需动作,在工作区域内不会出现奇异点,避免了本多关节机械手出现异常的情况,工作稳定性好。当执行单元9与障碍物发生碰撞时,关节会将所受力反馈给控制系统,当受力大于设定值时,控制系统控制各关节停止动作,使得本多关节机械手处于停止工作状态,起到防碰撞的功能,减小了本多关节机械手的损害。
24.本实施例中,所述第三关节4、第五关节6、第六关节7或第七关节71包括壳体41、减速器42、传动组件及电机44,所述壳体41设置有容置腔45及与容置腔45连通的开口,所述电机44和传动组件均容设于容置腔45内,所述减速器42嵌装于开口处并遮盖开口,所述传动组件包括主动轮43、从动轮46及传动带(图中未示出),所述主动轮43套装于电机44的输出轴外,所述从动轮46套装于减速器42的输入端(主轴输入端),所述传动带套设于主动轮43和从动轮46外;上一关节的减速器42的输出端(主轴输出端)与下一个关节的壳体41固定连接,所述电机44可以采用伺服电机,所述电机44与控制系统电连接。
25.在实际应用中,电机44的输出轴驱动主动轮43转动,转动的主动轮43经由传动带带动从动轮46转动,转动的从动轮46带动减速器42的输入端转动,使得减速器42的输出端带动下一个关节转动。当执行单元9碰到障碍物时,电机44会将受力反馈给控制系统,当受力大于设定值时,控制系统控制电机44停止工作,减小多关节机械手的损害,具备防撞功能。电机44和传动组件内置于壳体41,结构紧凑,外形美观,对电机44和传动组件起到保护的作用,通过减速器42自身结构对开口进行封口,节省了盖板的使用,简化了结构,降低了成本。该关节结构的结构简单且紧凑,动作灵敏,能够任意角度进行旋转,简化了结构,降低了制造和使用的成本,且通过带轮的传动方式,传动稳定性好,传动噪音小。
26.本实施例中,所述第三关节4的结构、第五关节6的结构、第六关节7的结构和第七关节71的结构相同。该结构设计,结构替换性好,通用性强,便于生产制造和维护,也降低了生产成本。
27.本实施例中,所述减速器42的主轴的轴向开设有第一过线孔47,所述壳体41装设
有固定板48,所述固定板48位于容置腔45内,所述电机44装设于固定板48,所述固定板48设置有与第一过线孔47同轴连通的第二过线孔49。第一过线孔47和第二过线孔49用于供电线贯穿,不但有利于对电线进行导向、定位和管理,避免电线散乱布置,还使得电线采用隐藏式走线,外形美观,避免电线外露,且有利于电线与每个关节内的电机44电和减速器42连接。
28.具体地,所述第一过线孔47的内壁涂覆有光滑涂层,所述光滑涂层的厚度为1mm,光滑涂层光滑,降低电线的磨损,延长电线的使用寿命。
29.本实施例中,所述壳体41装设有过线件481,所述过线件481位于容置腔45内,所述过线件481设置有一个或多个第三过线孔482。过线件481对电线进行固定;当第三过线孔482的数量为多个时,每个第三过线孔482分别供一种类别的电线贯穿,便于对不同种类的电线进行分类管理。
30.本实施例中,所述壳体41包括中空壳身411及盖设于中空壳身411的一端的封盖412,所述封盖412与中空壳身411围设成容置腔45,所述中空壳身411的另一端为开口,所述封盖412的外侧壁设置有散热结构413。该结构设计,实现了壳体41的模块式组装,壳体41内的结构拆装和维护便捷;散热结构413有利于对关节进行迅速散热,避免电机44和减速器42长时间在高温状态下工作。
31.优选地,所述散热结构413包括多片平行且等距设置的散热片。该结构设计,有利于关节的散热,避免电机44和减速器42长时间处于高温的工作状态中,延长了电机44和减速器42的使用寿命。
32.具体地,所述中空壳身411的外侧壁涂覆有散热涂层,散热效果更好;中空壳身411的内壁或/和封盖412的内壁经由导热件与电机44的外壳连接,电机44所产生的热量经由导热件传递至中空壳身411或/和封盖412上,再经由散热涂层和散热结构413对热量进行迅速散发,散热效果明显。
33.本实施例中,所述减速器42的外侧壁经由密封结构(图中未示出)与壳体41的内壁密封连接。优选地,所述密封结构包括密封圈及凹设于壳体41的内壁或减速器42的外壁的凹槽,所述密封圈嵌装于凹槽内,所述密封圈用于密封减速器42外侧壁与壳体41的内壁之间的间隙。该结构设计,密封效果好,避免水分等杂质轻易进入容置腔45内。
34.本实施例中,所述减速器42的输出端设置有连接环421;连接环421与对应的结构连接,便于相邻的两个关节驱动连接。
35.本实施例中,所述执行单元9包括与第七关节71的输出端连接的连接件91、连接于连接件91的吸料件92及设置于吸料件92的吸料面的缓冲垫93,所述缓冲垫93设置有与吸料件92连通的多个吸孔。吸料件92经由缓冲垫93上的多个吸孔将物料吸紧,以便于对物料进行转移和取放。由于缓冲垫93具备缓冲特性,所以在缓冲垫93与物料接触时,缓冲垫93起到缓冲保护的作用,避免执行单元9与物料发生硬性冲击碰撞,对物料起到保护的作用,保证了物料的质量。
36.本实施例中,所述多关节机械手还包括升降机构(图中未示出),所述升降机构的升降端与安装座1连接;升降机构与控制系统电连接。升降机构的升降端升降以驱动安装座1连带所有关节同步升降,进一步提高了本多关节机械手的灵动性,增加了本多关节机械手的行程。
37.本发明还提供一种码垛设备,包括上述的多关节机械手。本码垛设备具备多关节机械手的所有有益效果,在此不再赘述。
38.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
39.上述实施例为本发明较佳的实现方案,除此之外,本发明还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1