一种基于线性CCD养殖用粪带自动纠偏系统的制作方法
一种基于线性ccd养殖用粪带自动纠偏系统
技术领域
1.本发明涉及粪带自动纠偏系统技术领域,具体为一种基于线性ccd养殖用粪带自动纠偏系统。
背景技术:
2.随着农业科学技术的发展,养殖业迅速走向科学化,禽舍养殖也越来越自动化,科学化,规模化,所以对禽舍养殖设备也越来越受到饲养员的关注,而在禽类饲养过程中,排粪也是很重要的作业步骤,排粪作业一般需要用到养殖用清粪带,目前养殖用粪带的自动纠偏装置,因粪带拉力不均,舍内温度变化会造成粪带连续运转时难免发生跑偏问题,造成设备粪带损耗,在禽舍清粪作业中无法做到无人值守,需要养殖人员时刻观察粪带偏移情况对粪带拉紧轴进行调节,每次养殖结束后放松粪带后又需重粪带系统平衡,造成人力财产浪费,使用麻烦不便。
技术实现要素:
3.本发明的目的在于提供一种基于线性ccd养殖用粪带自动纠偏系统,以解决上述背景技术中提出在禽舍清粪作业中无法做到无人值守,需要养殖人员时刻观察粪带偏移情况对粪带拉紧轴进行调节,每次养殖结束后放松粪带后又需重粪带系统平衡,造成人力财产浪费,使用麻烦不便的问题。
4.为实现上述目的,本发明提供如下技术方案:一种基于线性ccd养殖用粪带自动纠偏系统,包括机架,所述机架呈前后对应设置有两处,两处机架之间呈左右对称等距间隔焊接有两排竖撑支杆,且两排四处竖撑支杆上呈上下等距间隔对称固定有八处纵向支撑杆,八处纵向支撑杆的前端对称固定连接有八处纵向安装板,八处纵向安装板的前端与前侧机架固定连接在一起;八处所述纵向支撑杆的后端对称固定设置有八处纵向撑连板,八处纵向撑连板的后端与后侧机架固定连接在一起;八处所述纵向撑连板之间设置有立体笼养框架,且八处纵向撑连板之间还设置有四处粪带,四处粪带贴近位于四处立体笼养框架底侧拦网的下方;所述粪带的前后两端转动设置有一处从动轴和一处主动轴;左右对应的两处所述纵向安装板上均开设有一处滑槽,两处滑槽中对称滑动安装有两处张力调节连接板,从动轴左右两端的轴承座与两处张力调节连接板固定连接在一起;左右对应的两处所述纵向安装板的后侧顶端均设置有一处检测单元;前侧所述机架右侧竖撑杆的顶端段上设置有一处控制箱,控制箱的箱盖上集成安装有开关单元,且控制箱的内部集成安装有控制单元;前侧所述机架左右竖撑杆上与纵向安装板对应的位置上安装有左调节减速电机和右调节减速电机,左调节减速电机和右调节减速电机通过控制线缆与控制单元电性连接。
5.该发明通过线性ccd图像传感器获得粪带偏移情况,arm控制器解算位置信息,通过pid控制环,控制左右减速电机旋转实现张拉力平衡。
6.优选的,所述检测单元包括角度调整架和安装架,两处所述安装架对称安装于左右对应的两处纵向安装板的后端段顶部,且两处安装架的顶端均转动安装有一处角度调整
架。
7.优选的,所述检测单元还包括遮光板和线性ccd图像传感器,两处所述角度调整架上安装有两处线性ccd图像传感器,且左右对应的两处纵向安装板的后端段上朝向粪带的一侧对称固定设置有两处方形结构的遮光板,两处遮光板的位置与两处线性ccd图像传感器对应。
8.优选的,左右对应的两处所述纵向安装板上转动设置有两处调整螺杆,两处调整螺杆的前端段上连接有两处销轴连接器,两处销轴连接器的尾端分别与左调节减速电机和右调节减速电机轴接传动,且两处调整螺杆与两处张力调节连接板旋拧贯穿配合。
9.优选的,所述控制单元包括电源控制空开,开关电源,bhl电机驱动器和主控制器,所述电源控制空开、两处bhl电机驱动器排列固定设置于控制箱背板的下部分上,且控制箱背板的上半部分上并排安装有开关电源和主控制器,主控制器与两处bhl电机驱动器电性连接。
10.优选的,两处所述bhl电机驱动器对应与左调节减速电机和右调节减速电机电性连接,且电源控制空开与开关电源电性连接,开关电源用于对两处bhl电机驱动器和主控制器供电,且两处线性ccd图像传感器与主控制器通信连接。
11.优选的,所述开关单元包括急停按钮,控制箱锁,三位选择旋钮,显示面板,左减速机手动按钮和右减速机手动按键,所述急停按钮、控制箱锁和显示面板间隔镶嵌安装于控制箱箱盖的上半部分上,且三位选择旋钮、左减速机手动按钮和右减速机手动按键排列安装于控制箱箱盖的下半部分上。
12.优选的,所述急停按钮、三位选择旋钮、左减速机手动按钮和右减速机手动按键均与主控制器电性连接,且显示面板与主控制器和两处bhl电机驱动器电性连接。
13.优选的,所述左调节减速电机、右调节减速电机、两处调整螺杆、两处销轴连接器和两处张力调节连接板共同组成了执行单元。
14.与现有技术相比,本发明的有益效果是:
15.1、本发明通过电机驱动器反馈电流进行总拉紧力控制,且通双目线性ccd传感器进行自动化的粪带居中控制,高减速比及脉冲信号反馈保证了双侧拉紧放松的同步性,无需每次养殖重新调整;
16.2、本发明通过张紧力控制方式调整粪带左右偏移不伤带,通过单目ccd传感器进行容错控制模式,通过遮光板403黑化的遮光板获得纯净ccd反馈信号,且可自动阈值调节,在不同亮度环境下均可实时采样出pp带位置信息,可通过设定自动放松粪带总张紧力;
17.3、本发明,通过张紧力控制,使得粪带缓慢左右移动,不伤粪带,通过pid控制环锁定粪带居中,高转速比及内置编码信号反馈保证了双侧调节板的同步性,无需每次养殖重新调节,且在每个养殖阶段均能自动调整粪带总张力保护粪带及框架结构。
附图说明
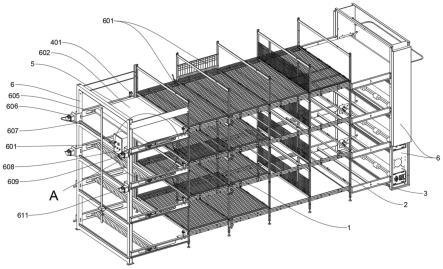
18.图1为本发明整体结构示意图;
19.图2为本发明图1中a部分放大结构示意图;
20.图3为本发明控制箱的箱盖结构示意图;
21.图4为本发明控制箱内部结构示意图;
22.图5为本发明检测单元示意图;
23.图6为本发明开关单元示意图;
24.图7为本发明控制单元示意图;
25.图8为本发明rtos系统运行图;
26.图9为本发明pid位置环示意图;
27.图中,部件名称与附图编号的对应关系为:
28.1、纵向支撑杆;2、竖撑支杆;3、纵向撑连板;4、检测单元;401、角度调整架;402、安装架;403、遮光板;404、线性ccd图像传感器;5、纵向安装板;6、机架;601、立体笼养框架;602、粪带;605、张力调节连接板;606、左调节减速电机;607、控制线缆;608、控制箱;609、右调节减速电机;611、从动轴;612、调整螺杆;613、销轴连接器;7、控制单元;701、电源控制空开;702、开关电源;703、bhl电机驱动器;704、主控制器;8、开关单元;801、急停按钮;802、控制箱锁;803、三位选择旋钮;804、显示面板;805、左减速机手动按钮;806、右减速机手动按键。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
30.请参阅图1至图8,本发明提供的一种实施例:一种基于线性ccd养殖用粪带自动纠偏系统,包括机架6,机架6呈前后对应设置有两处,两处机架6之间呈左右对称等距间隔焊接有两排竖撑支杆2,且两排四处竖撑支杆2上呈上下等距间隔对称固定有八处纵向支撑杆1,八处纵向支撑杆1的前端对称固定连接有八处纵向安装板5,八处纵向安装板5的前端与前侧机架6固定连接在一起;八处纵向支撑杆1的后端对称固定设置有八处纵向撑连板3,八处纵向撑连板3的后端与后侧机架6固定连接在一起;八处纵向撑连板3之间设置有立体笼养框架601,且八处纵向撑连板3之间还设置有四处粪带602,四处粪带602贴近位于四处立体笼养框架601底侧拦网的下方;粪带602的前后两端转动设置有一处从动轴611和一处主动轴;左右对应的两处纵向安装板5上均开设有一处滑槽,两处滑槽中对称滑动安装有两处张力调节连接板605,从动轴611左右两端的轴承座与两处张力调节连接板605固定连接在一起;左右对应的两处纵向安装板5的后侧顶端均设置有一处检测单元4;前侧机架6右侧竖撑杆的顶端段上设置有一处控制箱608,控制箱608的箱盖上集成安装有开关单元8,且控制箱608的内部集成安装有控制单元7;前侧机架6左右竖撑杆上与纵向安装板5对应的位置上安装有左调节减速电机606和右调节减速电机609,左调节减速电机606和右调节减速电机609通过控制线缆607与控制单元7电性连接。
31.如图5所示,检测单元4包括角度调整架401和安装架402,两处安装架402对称安装于左右对应的两处纵向安装板5的后端段顶部,且两处安装架402的顶端均转动安装有一处角度调整架401。
32.如图5所示,检测单元4还包括遮光板403和线性ccd图像传感器404,两处角度调整架401上安装有两处线性ccd图像传感器404,且左右对应的两处纵向安装板5的后端段上朝向粪带602的一侧对称固定设置有两处方形结构的遮光板403,两处遮光板403的位置与两处线性ccd图像传感器404对应,遮光板403采用铝板折弯后发黑处理制成,其为线性ccd提
供高品质背景线,有利于获得纯净ccd反馈信号。
33.如图2所示,左右对应的两处纵向安装板5上转动设置有两处调整螺杆612,两处调整螺杆612的前端段上连接有两处销轴连接器613,两处销轴连接器613的尾端分别与左调节减速电机606和右调节减速电机609轴接传动,且两处调整螺杆612与两处张力调节连接板605旋拧贯穿配合。
34.如图7所示,控制单元7包括电源控制空开701,开关电源702,bhl电机驱动器703和主控制器704,电源控制空开701、两处bhl电机驱动器703排列固定设置于控制箱608背板的下部分上,且控制箱608背板的上半部分上并排安装有开关电源702和主控制器704,主控制器704与两处bhl电机驱动器703电性连接。
35.如图7所示,两处bhl电机驱动器703对应与左调节减速电机606和右调节减速电机609电性连接,且电源控制空开701与开关电源702电性连接,开关电源702用于对两处bhl电机驱动器703和主控制器704供电,且两处线性ccd图像传感器404与主控制器704通信连接,开关电源702的功率为240w;bhl电机驱动器703可获得电机运转ab脉冲信号及电流大小信号,主控制器704采用arm架构。
36.如图6所示,开关单元8包括急停按钮801,控制箱锁802,三位选择旋钮803,显示面板804,左减速机手动按钮805和右减速机手动按键806,急停按钮801、控制箱锁802和显示面板804间隔镶嵌安装于控制箱608箱盖的上半部分上,且三位选择旋钮803、左减速机手动按钮805和右减速机手动按键806排列安装于控制箱608箱盖的下半部分上。
37.如图6所示,急停按钮801、三位选择旋钮803、左减速机手动按钮805和右减速机手动按键806均与主控制器704电性连接,且显示面板804与主控制器704和两处bhl电机驱动器703电性连接。
38.如图2所示,左调节减速电机606、右调节减速电机609、两处调整螺杆612、两处销轴连接器613和两处张力调节连接板605共同组成了执行单元,执行单元通过左调节减速电机606和右调节减速电机609以及调整螺杆612控制张力调节连接板605进行张力控制,左调节减速电机606和右调节减速电机609的减速比100:1,速度范围(0.5~30r/min),减速机输出扭矩13.7-16n/m,电机单周脉数3000pulse。
39.工作原理:通过采集ccd信号对比双侧信号跳变点,获得粪带602位置信息,将位置信息通过主控制器704解算输入增量型pid规划目标,通过串行多级pid作用于执行单元,通过pid前置作用调整左调节减速电机606和右调节减速电机609的转动方向、转动速度实现精确调节粪带602位置,通过同步拉紧、放松粪带602检测电流信息,检测拉紧状态、保持粪带602拉紧;
40.该系统实时控制系统(rtos)系统图以及pid位置环的具体工作流程:自动模式下通过ccd获得128个像素点亮度信息(黑铝板信号为0白色pp带检测信号根据环境亮度变化),通过软件进行阈值调节、平滑加权获得突变上升沿位置,此时可能出现四种情况,检测到左目ccd上升沿信号,无右目信号,通过系统设置的左目上升沿误差控制数进行误差计算(设置数-左目上升沿信号点号)并报警,检测到右目ccd上升沿信号,无左目信号,通过系统设置的右目上升沿误差控制数进行误差计算(右目上升沿信号点号-设置数)并报警,双目同时获得上升沿信号点,通过计算(256-右目上升沿信号点-左目上升沿信号点)进行误差计算,同时无上升沿信号,判断双ccd遮蔽,报警并取消自动控制,位置误差通过对比规划器
值进行pid调节前置,执行单元输出始终保持粪带602居中;
41.总张紧力控制,通过同时拉紧粪带602,将左调节减速电机606和右调节减速电机609的输出保持1400转/分钟,此时减速机转速14转/分钟,通过采集bhl电机驱动器703电流输出信号,对比设定值进行同步张紧力控制。
42.手动模式才用三位选择旋钮803,接入光隔离信号系统px5\px6点,对px5接入24v置高表示该时刻为正传控制,左调节减速电机606和右调节减速电机609设定同步转速24转/分钟,通过点击左减速机手动按钮805和右减速机手动按键806进行电机拉紧控制,或同时按下左减速机手动按钮805和右减速机手动按键806进行同步拉紧。对px6接入24v置高表示该时刻为反传控制,左调节减速电机606和右调节减速电机609设定同步转速30转/分钟,通过点击左减速机手动按钮805和右减速机手动按键806进行电机放松控制,或同时按下左、右手动控制按钮进行同步放松粪带602;当px5/px6均未接入信号时为自动控制。
43.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1