一种基于视觉的无损自动拆袋系统
1.本发明涉及拆袋装置技术领域,尤其涉及一种基于视觉的无损自动拆袋系统。
背景技术:
2.吨袋,被广泛应用于工业领域的物料运输包装,但是,目前对于吨袋的拆解,特别是内部装有有害或者粉状颗粒的吨袋的拆解大多是采用人工的方式,而采用人力拆袋会对人体产生一定的伤害,目前市场上已有的自动拆袋设备,其在拆袋后会使得吨袋遭到损坏,不能回收再利用,这无疑增加了企业成本,因此便急需一种自动化、无人化、智能化的无损拆包设备,既可以取代人工,又能够提高车间自动化程度和工作效率。
技术实现要素:
3.本发明的目的是为了解决现有技术中存在吨袋的拆解多为人工,并且会损坏吨袋使得无法重复利用的缺点,而提出的一种基于视觉的无损自动拆袋系统。
4.为了实现上述目的,本发明采用了如下技术方案:
5.设计一种基于视觉的无损自动拆袋系统,包括执行结构,所述执行机构电性连接有控制器,所述控制器电性连接有视觉系统、图像处理系统、信息管理系统、pc软件控制,所述执行机构包括桁架,所述桁架的上端固定连接有抓取机构,所述抓取机构下方的左右两侧分别固定设置有第一机器人和第二机器人。
6.优选的,所述第一机器人与所述第二机器人均包括安装架,两组所述安装架相对的端面上均设置有静平台,所述静平台的外侧端面上圆周均匀分布有多组联动机构,多组所述联动机构的上端之间转动连接有动平台,两组所述动平台的相对的一侧端面上分别设置有第一裁剪组件和第二裁剪组件。
7.优选的,所述联动机构包括安装座,所述安装座与所述静平台固定连接,所述安装座的上端转动连接有第一支链,所述第一支链的上端转动连接有第二支链,所述第二支链的上端与所述动平台转动连接,所述安装座的外侧端面上固定设置有驱动电机,所述启动电机的输出轴与所述第一支链的下端相连。
8.优选的,所述动平台朝向所述静平台的一侧端面上转动连接有贯穿所述静平台的可伸缩单轴。
9.优选的,所述第一裁剪组件包括直钩、针、叉,所述第二裁剪组件包括横刀、竖刀、叉、击锤。
10.优选的,所述视觉系统包括第一摄像头和第二摄像头,所述第一摄像头与所述第二摄像头分别围绕所述抓取机构与所述第一机器人和所述第二机器人的外围分布设置。
11.优选的,所述控制器与所述pc软件控制之间通过以太网电性连接。
12.优选的,所述抓取机构的输出端夹持有吨袋,所述吨袋的开口朝向所述第一机器人和所述第二机器人之间的中部。
13.本发明提出的一种基于视觉的无损自动拆袋系统,有益效果在于:
14.通过所设置的视觉系统和图像处理系统与第一机器人和第二机器人之间的协作配合,实现了吨袋绳结视觉位置检测、拆开的功能,使得无需利用人工开启或破坏吨袋的情况下取出吨袋内的物品,减少了对人员的伤害并使得吨袋能够回收使用;
15.通过所设置的第一机器人和第二机器,其结构简单,零件总数相对较少,其中有许多零件能够通用,便于批量生产,成本容易控制,与传统机械臂相比,其“硬件”简单,“软件”复杂,具有更高的技术附加值;
16.通过所设置的静平台、可伸缩单轴、联动机构和动平台之间的配合,能够实现第一裁剪组件和第二裁剪组件的多角度转动,提高了使用的灵活度。
附图说明
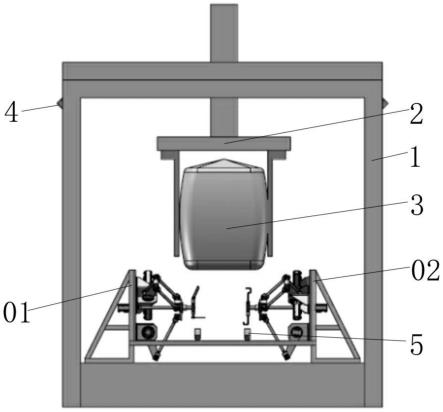
17.图1为本发明提出的一种基于视觉的无损自动拆袋系统的正视结构示意图;
18.图2为本发明提出的一种基于视觉的无损自动拆袋系统的侧视结构示意图;
19.图3为本发明提出的一种基于视觉的无损自动拆袋系统的执行机构结构示意图;
20.图4为本发明提出的一种基于视觉的无损自动拆袋系统的系统结构示意图;
21.图5为本发明提出的一种基于视觉的无损自动拆袋系统的流程结构示意图。
22.图中:1、桁架;2、抓取机构;3、吨袋;4、第一摄像头;5、第二摄像头;01、第一机器人;02、第二机器人;6、安装架;7、静平台;8、安装座;9、驱动电机;10、第一支链;11、第二支链;12、动平台;13、可伸缩单轴;14、直钩;15、针;16、叉;17、横刀;18、竖刀。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
24.参照图1-5,一种基于视觉的无损自动拆袋系统,包括执行结构,执行机构电性连接有控制器,控制器电性连接有视觉系统、图像处理系统、信息管理系统、pc软件控制,执行机构包括桁架1,桁架1的上端固定连接有抓取机构2,抓取机构2下方的左右两侧分别固定设置有第一机器人01和第二机器人02。
25.参考图3,第一机器人01与第二机器人02均包括安装架6,两组安装架6相对的端面上均设置有静平台7,静平台7的外侧端面上圆周均匀分布有多组联动机构,多组联动机构的上端之间转动连接有动平台12,两组动平台12的相对的一侧端面上分别设置有第一裁剪组件和第二裁剪组件,联动机构与动平台12之间通过球铰转动连接。
26.联动机构包括安装座8,安装座8与静平台7固定连接,安装座8的上端转动连接有第一支链10,第一支链10的上端转动连接有第二支链11,第二支链11的上端与动平台12转动连接,安装座8的外侧端面上固定设置有驱动电机9,驱动电机9的输出轴与第一支链10的下端相连,结构简单,零件总数相对较少,其中有许多零件能够通用,便于批量生产以及控制成本。
27.动平台12朝向静平台7的一侧端面上转动连接有贯穿静平台7的可伸缩单轴13,使得能够具备航向角偏移,实现刀具变换,使得可以绕z轴360
°
旋转,大大扩大了机器人的工作空间,使得刀具变换成为可能。
28.第一裁剪组件包括直钩14、针15、叉16,第二裁剪组件包括横刀17、竖刀18、叉16、
击锤,起到拆线作用,并丰富功能。
29.参考图2,视觉系统包括第一摄像头4和第二摄像头5,第一摄像头4与第二摄像头5分别围绕抓取机构2与第一机器人01和第二机器人02的外围分布设置,视觉系统采用多个相机,“手眼分离”的安装方式,完成对吨包位置、内外绳结的定位以及判断内容物是否流出。
30.参考图4,控制器与pc软件控制之间通过以太网电性连接,使得能够远程进行控制。
31.参考图1、2,抓取机构2的输出端夹持有吨袋3,吨袋3的开口朝向第一机器人01和第二机器人02之间的中部,便于拆包操作。
32.工作方式;工作时,将抓取机构2启动,抓取机构2在桁架1上运动,将吨袋3运输到机器人上方,第一摄像头4识别出吨袋3的位置、形状等,第二摄像头5识别出吨袋3口的形状,找出绳结所处位置,以及后续内层袋子的颜色,绳结的位置、形状等,根据上述摄像头提供的数据及参数通过第一机器人01的直钩14扯出绳结,并通过第二机器人02的横刀17割断绳索,完成第一层的割绳,第二摄像头5判断内层袋是否露出,通过第二机器人02的击锤的锤击使内层露出,之后第二摄像头5判断内层袋的绳束所在的空间位置,然后用直钩14钩扯出内部绳索,竖刀18割断绳索,第二摄像头5判断内部货物是否流出,撤回执行机构,最后抓取机构2将吨袋3移出。
33.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1