刀粒下料机的制作方法
1.本发明涉及刀粒生产设备技术领域,更具体地说,是涉及一种刀粒下料机。
背景技术:
2.刀粒是一种合金刀具,其形状可以为菱形、三角形等,由于其具有极好的切削强度和耐磨性,常用于数控机床或其他切削加工设备上。其中,刀粒可以由金属粉末通过粉末成型压机压制成型,之后再通过高温烧结而制成。当刀粒在粉末成型压机中压制成型后,一般采用机械手将其取出,但是现有技术中缺少一种集自动清扫吸尘、自动称重、自动取料搬运、自动摆盘、自动下料的自动化下料机。
技术实现要素:
3.本发明的目的在于克服现有技术中的上述缺陷,提供一种刀粒下料机。
4.为实现上述目的,本发明提供了一种刀粒下料机,包括机架,所述机架上设有用于对刀粒进行清扫吸尘的清扫吸尘机构、用于对刀粒进行称重的称重机构、用于将空的料盘输送至料盘升降式输送机构的料盘上料输送机构、用于将料盘向上输送进行接料并将装满刀粒的料盘输送至料盘下料输送机构的料盘升降式输送机构、用于将装满刀粒的料盘输出的料盘下料输送机构、以及用于带动刀粒依次移送至清扫吸尘机构、称重机构、料盘升降式输送机构上的料盘的取料搬运机构,所述清扫吸尘机构、称重机构、料盘升降式输送机构、料盘上料输送机构按顺序依次设置在机架上,所述料盘下料输送机构安装在料盘上料输送机构的上方并与其相平行,所述料盘升降式输送机构能够上下移动,从而分别与料盘上料输送机构和料盘下料输送机构实现对接,所述取料搬运机构位于料盘升降式输送机构的侧边。
5.作为优选的,所述清扫吸尘机构包括吸尘支架、清洁毛刷、毛刷电机、吸尘口、吸尘漏斗接头、吹气头,所述毛刷电机和吸尘口设置在吸尘支架上,所述毛刷电机的旋转轴与清洁毛刷相连接并带动其旋转,所述吸尘漏斗接头安装吸尘口的底部并通过气管与抽气设备相连接,所述吹气头设有若干个并环绕布置在吸尘口的圆周外壁处,所述吹气头通过吸尘口的圆周外壁上开设的吹气孔与吸尘口的内部相连通,所述吸尘口与吸尘漏斗接头之间设有过滤网。
6.作为优选的,所述称重机构包括称重支架和称重器,所述称重器安装在称重支架的顶部,所述称重器的称重部位两侧分别设有光纤传感器。
7.作为优选的,所述料盘升降式输送机构包括第一皮带线框架、第一皮带、第一皮带轮、第一皮带轮轴、第一皮带线电机、第一皮带线驱动齿轮、第二皮带线驱动齿轮、升降驱动气缸、升降导柱、直线轴承、料盘顶紧定位气缸、料盘顶紧定位块、第一料盘限位块,所述第一皮带轮轴安装在第一皮带线框架的两端,每根第一皮带轮轴上分别设有两个第一皮带轮,所述第一皮带设有两根并分别套装在两根第一皮带轮轴上对应的第一皮带轮上,所述第一皮带线电机安装在第一皮带线框架上,并通过第一皮带线驱动齿轮与安装在其中一根
第一皮带轮轴上的第二皮带线驱动齿轮传动连接,从而带动第一皮带转动,所述升降导柱安装在第一皮带线框架的四个边角处,所述升降导柱与机架上安装的直线轴承滑动连接,所述升降驱动气缸的输出杆与第一皮带线框架相连接从而带动第一皮带线框架上下移动,所述料盘顶紧定位气缸安装在第一皮带线框架的一侧并与料盘顶紧定位块相连接,所述第一料盘限位块安装在第一皮带线框架的末端两侧。
8.作为优选的,所述料盘上料输送机构包括第二皮带线框架、框架支座、第二皮带、第二皮带轮、第二皮带轮轴、第二皮带线电机、第二减速箱,所述第二皮带线框架通过框架支座安装在机架上,所述第二皮带轮轴安装在第二皮带线框架的两端,每根第二皮带轮轴上分别设有两个第二皮带轮,所述第二皮带设有两根并分别套装在两根第二皮带轮轴上对应的第二皮带轮上,所述第二皮带线电机安装在第一皮带线框架上,并通过第二减速箱与其中一根第二皮带轮轴的一端传动连接,从而带动第二皮带转动。
9.作为优选的,所述料盘下料输送机构包括第三皮带线框架、框架分隔座、第三皮带、第三皮带轮、第三皮带轮轴、第三皮带线电机、第三减速箱,所述第三皮带线框架通过框架分隔座平行安装在第二皮带线框架的上方,所述第三皮带轮轴安装在第三皮带线框架的两端,每根第三皮带轮轴上分别设有两个第三皮带轮,所述第三皮带设有两根并分别套装在两根第三皮带轮轴上对应的第三皮带轮上,所述第三皮带线电机安装在第一皮带线框架上,并通过第三减速箱与其中一根第三皮带轮轴的一端传动连接,从而带动第三皮带转动,所述第三皮带线框架的末端设有两个平行设置的第二料盘限位块,两个第二料盘限位块的内侧分别设有若干个滚轮。
10.作为优选的,所述取料搬运机构包括多轴机器人、第一快速交换夹具、第二快速交换夹具和夹料器或吸料器,所述多轴机器人的末端轴与第一快速交换夹具相连接,所述第二快速交换夹具与夹料器或吸料器相连接,所述第一快速交换夹具与第二快速交换夹具相连接。
11.作为优选的,所述夹料器包括夹料器架体、夹子气缸和夹头,所述第二快速交换夹具安装在夹料器架体的一端,所述夹子气缸安装在夹料器架体的另一端,所述夹子气缸的两个夹子分别与夹头相连接。
12.作为优选的,所述吸料器包括吸料支座、旋转电机、旋转管、旋转皮带、旋转皮带轮、吸盘座和吸盘,所述第二快速交换夹具安装在吸料支座的一端,所述旋转管可转动地安装在吸料支座内,所述旋转管的一端从吸料支座的另一端伸出与吸盘座相连接,所述旋转电机安装在吸料支座的顶部,所述旋转皮带轮分别安装在旋转电机的旋转轴和旋转管上,所述旋转皮带套装在两个旋转皮带轮之间,所述吸盘安装在吸盘座的末端。
13.作为优选的,该刀粒下料机还包括用于不良品刀粒下料的不良品下料输送带、用于放置夹料器和/或吸料器的支撑台,所述不良品下料输送带和支撑台分别安装在机架上,所述不良品下料输送带位于称重机构的侧边。
14.与现有技术相比,本发明的有益效果在于:
15.本发明的结构设计合理,机架上设有清扫吸尘机构、称重机构、料盘上料输送机构、料盘升降式输送机构、料盘下料输送机构以及取料搬运机构,可以将刀粒加工设备中的刀粒取出并进行摆盘,本发明可完成刀粒表面自动清扫吸尘、自动称重、自动取料搬运、料盘自动上料、刀粒自动摆盘、料盘和刀粒自动下料等一系列自动化作业,自动化程度高,大
大提高了生产效率,降低了生产成本,满足企业的大规模化生产。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
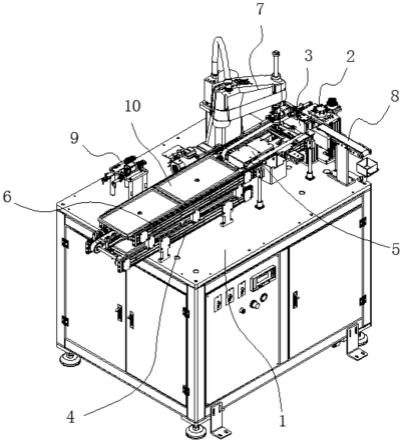
17.图1是本发明实施例提供的刀粒下料机的结构示意图;
18.图2是本发明实施例提供的刀粒下料机的俯视图;
19.图3是本发明实施例提供的清扫吸尘机构的结构示意图;
20.图4是本发明实施例提供的称重机构的结构示意图;
21.图5是本发明实施例提供的料盘升降式输送机构的结构示意图;
22.图6是本发明实施例提供的料盘上料输送机构和料盘下料输送机构的组装图;
23.图7是本发明实施例提供的料盘上料输送机构的结构示意图;
24.图8是本发明实施例提供的取料搬运机构的结构示意图;
25.图9是本发明实施例提供的第一快速交换夹具的结构示意图;
26.图10是本发明实施例提供的夹料器的结构示意图;
27.图11是本发明实施例提供的吸料器的结构示意图;
28.图12是本发明实施例提供的不良品下料输送带的结构示意图。
具体实施方式
29.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参考图1和图2,本发明的实施例提供了一种刀粒下料机,包括机架1,机架1上设有用于对刀粒进行清扫吸尘的清扫吸尘机构2、用于对刀粒进行称重的称重机构3、用于将空的料盘10输送至料盘升降式输送机构5的料盘上料输送机构4、用于将料盘10向上输送进行接料并将装满刀粒的料盘10输送至料盘下料输送机构6的料盘升降式输送机构5、用于将装满刀粒的料盘输出的料盘下料输送机构6、以及用于带动刀粒依次移送至清扫吸尘机构2、称重机构3、料盘升降式输送机构5上的料盘的取料搬运机构7,清扫吸尘机构2、称重机构3、料盘升降式输送机构5、料盘上料输送机构4按顺序依次设置在机架1上,料盘下料输送机构6安装在料盘上料输送机构4的上方并与其相平行,料盘升降式输送机构5能够上下移动,从而分别与料盘上料输送机构4和料盘下料输送机构6实现对接,取料搬运机构7位于料盘升降式输送机构5的侧边。
31.下面结合附图对本实施例各个组成部分进行详细说明。
32.如图3所示,清扫吸尘机构2包括吸尘支架21、清洁毛刷22、毛刷电机23、吸尘口24、吸尘漏斗接头25、吹气头26,毛刷电机23和吸尘口24设置在吸尘支架21上,毛刷电机23的旋转轴与清洁毛刷22相连接并带动其旋转,吸尘漏斗接头25安装吸尘口24的底部并通过气管
与抽气设备(如抽真空机或抽气泵等)相连接,吹气头26设有若干个并环绕布置在吸尘口24的圆周外壁处,吹气头26通过吸尘口24的圆周外壁上开设的吹气孔241与吸尘口24的内部相连通,吸尘口24与吸尘漏斗接头25之间设有圆形网状的过滤网。
33.当取料搬运机构7将刀粒搬运到清扫吸尘机构2的工位时,毛刷电机23能够带动清洁毛刷22转动,对刀粒表面多余的粉料进行清扫,之后再移动到吸尘口24,通过吹气头26的吹风和向下的吸力将粘附在刀粒表面多余的粉料清除干净。
34.如图4所示,称重机构3包括称重支架31和称重器32,称重器32安装在称重支架31的顶部,称重器32的称重部位两侧分别设有光纤传感器33。
35.当清扫完成后,取料搬运机构7将刀粒搬运到称重机构3,光纤传感器33检测到刀粒后,开始称重。
36.如图5所示,料盘升降式输送机构5包括第一皮带线框架51、第一皮带52、第一皮带轮53、第一皮带轮轴54、第一皮带线电机55、第一皮带线驱动齿轮56、第二皮带线驱动齿轮57、升降驱动气缸58、升降导柱59、直线轴承510、料盘顶紧定位气缸511、料盘顶紧定位块512、第一料盘限位块513,第一皮带轮轴54安装在第一皮带线框架51的两端,每根第一皮带轮轴54上分别设有两个第一皮带轮53,第一皮带52设有两根并分别套装在两根第一皮带轮轴54上对应的第一皮带轮53上,第一皮带线电机55安装在第一皮带线框架51上,并通过第一皮带线驱动齿轮56与安装在其中一根第一皮带轮轴54上的第二皮带线驱动齿轮57传动连接,从而带动第一皮带52转动,升降导柱59安装在第一皮带线框架51的四个边角处,升降导柱59与机架1上安装的直线轴承510滑动连接,升降驱动气缸58安装在机架1的顶部面板底部,升降驱动气缸58的输出杆穿过机架1的顶部面板与第一皮带线框架51相连接从而带动第一皮带线框架51上下移动,料盘顶紧定位气缸511安装在第一皮带线框架51的一侧并与料盘顶紧定位块512相连接,第一料盘限位块513安装在第一皮带线框架51的末端两侧,第一料盘限位块513可以优选设置成l形。
37.当料盘上料输送机构4将空的料盘输出至料盘升降式输送机构5时,第一料盘限位块513、以及料盘顶紧定位气缸511会带动料盘顶紧定位块512对料盘进行定位,之后升降驱动气缸58带动第一皮带线框架51上的所有部件以及料盘向上移动,此时料盘升降式输送机构5与料盘下料输送机构6相对接。当取料搬运机构7将刀粒装满料盘后,料盘顶紧定位气缸511带动料盘顶紧定位块回缩,松开料盘,第一皮带线电机55带动第一皮带轮53旋转,从而将装满刀粒的料盘输送至料盘下料输送机构6,后续料盘升降式输送机构5向下复位,重新与料盘上料输送机构4相对接。
38.如图6和图7所示,料盘上料输送机构4包括第二皮带线框架41、框架支座42、第二皮带43、第二皮带轮44、第二皮带轮轴45、第二皮带线电机46、第二减速箱47,第二皮带线框架41通过框架支座42安装在机架1上,第二皮带轮轴45安装在第二皮带线框架41的两端,每根第二皮带轮轴45上分别设有两个第二皮带轮44,第二皮带43设有两根并分别套装在两根第二皮带轮轴45上对应的第二皮带轮44上,第二皮带线电机46安装在第一皮带线框架51上,并通过第二减速箱47与其中一根第二皮带轮轴45的一端传动连接,从而带动第二皮带43转动。
39.上料时,第二皮带线电机46能够带动第二皮带43旋转,从而将空的料盘往靠近料盘升降式输送机构5方向输送。
40.如图6所示,料盘下料输送机构6包括第三皮带线框架61、框架分隔座62、第三皮带63、第三皮带轮64、第三皮带轮轴65、第三皮带线电机66、第三减速箱67,第三皮带线框架61通过框架分隔座62平行安装在第二皮带线框架41的上方,第三皮带轮轴65安装在第三皮带线框架61的两端,每根第三皮带轮轴65上分别设有两个第三皮带轮64,第三皮带63设有两根并分别套装在两根第三皮带轮轴65上对应的第三皮带轮64上,第三皮带线电机66安装在第一皮带线框架51上,并通过第三减速箱67与其中一根第三皮带轮轴65的一端传动连接,从而带动第三皮带63转动,第三皮带线框架61的末端设有两个平行设置的第二料盘限位块68,两个第二料盘限位块38的内侧分别设有若干个滚轮69。
41.当料盘升降式输送机构5将装满刀粒的料盘输送至料盘下料输送机构6时,第三皮带线电机66带动第三皮带63旋转,从而将装满刀粒的料盘往远离料盘下料输送机构6的方向移动,最后第二料盘限位块68对料盘进行限位阻挡,以方便操作人员或机械手等机器取走料盘。
42.如图8所示,取料搬运机构7包括多轴机器人71、第一快速交换夹具72、第二快速交换夹具73和吸料器75,多轴机器人71可以设置为四轴机器人、五轴机器人或六轴机器人,多轴机器人71的末端轴与第一快速交换夹具72相连接,第二快速交换夹具73与吸料器75相连接,第一快速交换夹具72与第二快速交换夹具73相连接。
43.其中,如图9和图10所示,第一快速交换夹具72和第二快速交换夹具73为外购件,是一种气动的机器人快换夹具,第一快速交换夹具72和第二快速交换夹具73能够快速卡接或快速分离。
44.如图10所示,吸料器75包括吸料支座751、旋转电机752、旋转管753、旋转皮带754、旋转皮带轮755、吸盘座756和吸盘757,第二快速交换夹具73安装在吸料支座751的一端,旋转管753可转动地安装在吸料支座751内,旋转管753的一端从吸料支座751的另一端伸出与吸盘座756相连接,旋转电机752安装在吸料支座751的顶部,旋转皮带轮755分别安装在旋转电机752的旋转轴和旋转管753上,旋转皮带754套装在两个旋转皮带轮755之间,吸盘757安装在吸盘座756的末端。
45.该吸料器75是一种可360度旋转的吸料器,旋转电机752能够带动吸盘旋转改变方向。
46.当然,在其他实施例中,也可以采用夹料器74替换吸料器。举例而言,如图11所示,夹料器74可以包括夹料器架体741、夹子气缸742和夹头743,第二快速交换夹具73安装在夹料器架体741的一端,夹子气缸742安装在夹料器架体741的另一端,夹子气缸742的两个夹子分别与夹头743相连接。夹子气缸742能够带动两个夹头743夹持刀粒。
47.根据实际需要,在其他实施例中,该刀粒下料机还可以额外增设有用于不良品刀粒下料的不良品下料输送带8、用于放置夹料器74和/或吸料器75的支撑台9。
48.如图1和图2所示,不良品下料输送带8和支撑台9分别安装在机架1上,不良品下料输送带8位于称重机构3的侧边。当称重机构3称重完后,如果刀粒的重量出现异常,取料搬运机构7能够将不良品刀粒移送至不良品下料输送带8。
49.工作时,夹料器74、吸料器75的其中一个可以放置在支撑台9上,当需要更换取料方式时,多轴机器人71就能够带动夹料器74或吸料器75移动到支撑台,进行夹料器74和吸料器75的互换。
50.综上所述,本发明的结构设计合理,可完成刀粒表面自动清扫吸尘、自动称重、自动取料搬运、料盘自动上料、刀粒自动摆盘、料盘和刀粒自动下料、以及不良品自动下料等一系列自动化作业,自动化程度高,大大提高了生产效率,降低了生产成本,满足企业的大规模化生产。
51.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1