一种晶圆自动贴膜机的上下料装置及其方法与流程
1.本发明属于晶圆切割设备上料装置的技术领域,具体为一种晶圆自动贴膜机的上下料装置及其方法。
背景技术:
2.在芯片划切工艺之前,需要用薄膜将晶圆贴在钢环上。现有的晶圆贴膜机多为半自动贴膜,需要人工进行晶圆的上料和钢环的上下料,导致贴膜机的贴膜效率低,人工劳动成本大。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的是提供了一种晶圆自动贴膜机的上下料装置及其方法,解决现有的晶圆贴膜机多为半自动贴膜,需要人工进行晶圆的上料和钢环的上下料,导致贴膜机的贴膜效率低,人工劳动成本大的技术问题。
4.本发明采取的方案为:一种晶圆自动贴膜机的上下料装置及其方法,包括:第一步:晶圆上料组件将晶圆料盒中的晶圆料盒移动到待取位置;第二步:晶圆取片机械手移动至晶圆上料组件的晶圆料盒中夹取晶圆后从晶圆料盒中退出并定位夹取晶圆的圆心;第三步:晶圆机械手再将晶圆转运至晶圆寻边组件上,晶圆寻边组件可寻找到晶圆上的缺口或平边,并将缺口或平边对准指定方向。晶圆搬运机械手移动至晶圆寻边组件的上方,吸附晶圆并将晶圆移动至指定位置;第四步:钢环上下料组件将钢环料框移动到待取位置,刚环取片机械手移动至取片位置夹住钢环,并使刚环随运动,运动过程中钢环在规整组件的滑槽上滑动,待钢环滑至指定位置,钢环取片机械手松开钢环并移动至初始位置;第五步:钢环留在规整组件的滑槽上。钢环规整组件规整钢环至中间,钢环搬运机械手移动至规整后的钢环上方,并吸附钢环将钢环搬运至指定位置;第六步:钢环和晶圆贴膜完成后,钢环搬运机械手吸附钢环,并将贴有晶圆的钢环移动至规整组件的滑槽上,此时钢环上下料组件将钢环料框移动至下料位置,钢环取片机械手将贴有钢环的晶圆推至钢环料框中,钢环存放在贴晶圆前的原始位置。
5.优选的,一种晶圆自动贴膜机的上下料装置,包括机架,其特征在于,所述的机架上固定连接有钢环上下料组件,所述的机架上固定连接有位于钢环上下料组件左侧的晶圆上料组件,所述的机架上固定连接有位于钢环上下料组件下侧的钢环搬运机械手组件,所述的机架上固定连接有位于晶圆上料组件下侧的晶圆取片机械手组件,所述的机架上固定连接有位于晶圆取片机械手组件左侧的晶圆寻边组件,所述的机架上固定连接有位于钢环搬运机械手组件与晶圆取片机械手组件之间的钢环规整组件;所述的机架上固定连接有位于钢环规整组件与晶圆取片机械手组件之间的晶圆搬运机械手,所述的机架上固定连接有与晶圆搬运机械手配合的钢环取片机械手。
6.优选的,所述的晶圆上料组件包括机架上固定连接的晶圆上料模组,所述的晶圆上料模组移动块上固定连接有晶圆料盒支撑平台,所述的晶圆上料模组上固定连接有晶圆上料电机,所述的晶圆料盒支撑平台上可拆卸连接有晶圆料盒本体,所述的晶圆料盒本体内放置有晶圆本体。
7.优选的,所述的晶圆转运机械手包括机架上固定连接的晶圆运转电机,所述的机架上固定连接有带座轴承,所述的带座轴承内设有晶圆转运丝杠,所述的晶圆转运丝杠与晶圆运转电机转动轴端经晶圆转运皮带连接,所述的机架上滑动连接有与晶圆转运丝杠螺纹连接的晶圆吸盘连接板,所述的机架上固定连接有与晶圆吸盘连接板配合的晶圆转运直线导轨,所述的晶圆吸盘连接板上固定连接有晶圆转运气缸,所述的晶圆转运气缸输出端固定连接有与寻边组件配合的晶圆吸盘支撑板,所述的晶圆吸盘支撑板底部设有晶圆吸盘,所述的晶圆吸盘支撑板与晶圆吸盘设有弹簧。
8.优选的,所述的钢环上下料包括机架上设置的钢环上下料直线模组,所述的机架上固定连接有与钢环上下料直线模组配合的钢环上下料电机,所述的钢环上下料电机移动端固定连接有钢环料框支撑平台,所述的钢环料框支撑平台可拆卸连接有钢环料框。
9.优选的,所述的钢环取片规整组件包括机架上间隔固定连接的两组钢环规整导轨,两组所述的钢环规整导轨上均滑动连接有齿条连接板,所述的齿条连接板上固定连接有规整滑槽连接板,所述的规整滑槽连接板开设有钢环本体配合的滑槽,所述的机架上固定连接有规整电机,所述的规整电机转动轴端固定连接有齿轮,所述的齿条连接板上固定连接有与齿轮啮合的齿条,所述的机架设有取钢环模组,所述的机架上固定连接有与取钢环模组配合的取钢环电机,所述的取钢环模组移动端固定连接有钢环夹片下连接板,所述的钢环夹片下连接板固定连接有钢环夹片上连接板,所述的钢环夹片上连接板固定连接有钢环夹取气缸,所述的钢环夹片下连接板固定连接有钢环下夹片,所述的钢环夹取气缸固定连接有与钢环下夹片配合的钢环上夹片。
10.优选的,所述的钢环搬运机械手包括机架上固定连接的钢环搬运模组,所述的钢环搬运模组移动端固定连接有钢环搬运气缸连接板,所述的钢环搬运气缸连接板上固定连接有钢环搬运气缸,所述的钢环搬运气缸输出端固定连接有与钢环本体配合的钢环搬运机械手连接板,所述的机架上固定连接有与钢环搬运模组配合的钢环搬运电机。
11.本发明的有益效果:一种晶圆和钢环的上下料装置可实现晶圆和钢环的全自动上下料过程,操作过程中只需将装由晶圆和料框的晶圆放置在指定位置,该装置便能完成晶圆贴膜机的自动上下料过程,操作简单,大大提高了晶圆贴膜的效率,解决了现有的晶圆贴膜机多为半自动贴膜,需要人工进行晶圆的上料和钢环的上下料,导致贴膜机的贴膜效率低,人工劳动成本大的技术问题。
附图说明
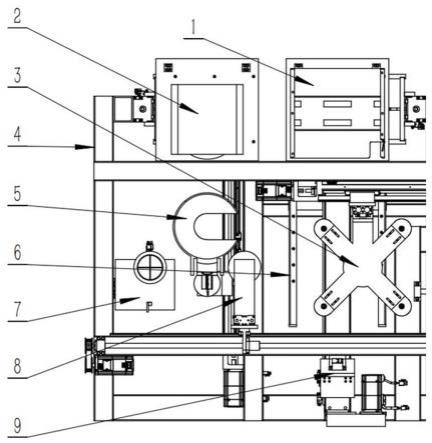
12.图1是本发明的总结构图。
13.图2是本发明的晶圆上料组件剖视图。
14.图3是本发明的晶圆料盒本体的立体视图。
15.图4是本发明的晶圆转运机械手俯视图。
16.图5是本发明的晶圆转运机械手正视图。
17.图6是本发明的钢环上下料装置剖视图。
18.图7是本发明的钢环取片规整正视图。
19.图8是本发明的钢环取片规整俯视图。
20.图9是本发明的钢环搬运机械手剖视图。
21.附图标记:1、刚环上下料组件;2、晶圆上料组件;3、钢环搬运机械手组件;4、机架;5、晶圆取片机械手组件;6、钢环规整组件;7、晶圆寻边组件;8、晶圆搬运机械手;9、钢环取片机械手;11、钢环料框;12、钢环料框支撑平台;13、钢环上下料直线模组;14、钢环上下料电机;21、晶圆料盒本体;22晶圆料盒支撑平台;23、晶圆上料模组;24、晶圆上料电机;211、晶圆本体;31、钢环吸盘;32、钢环吸盘连接板;33、钢环搬运机械手连接板;34、钢环搬运气缸;35、钢环搬运气缸连接板;36、钢环搬运模组;37、钢环搬运电机;4、机架;61、滑槽;62、齿条连接板;63、齿条;64、齿轮;65、规整电机;66、规整滑槽连接板67、钢环规整导轨;68、规整电机固定板;81、带座轴承;82、晶圆转运丝杠;83、晶圆吸盘连接板;84、晶圆转运电机;85、晶圆转运带轮;86、晶圆转运皮带;87、晶圆吸盘支撑板;88、晶圆转运气缸;89、晶圆转运直线导轨;90、晶圆吸盘;80、弹簧;91、取钢环模组;92取钢环电机;93、钢环夹片下连接板;94、钢环夹片上连接板;95、钢环下夹片;96、钢环上夹片;97、钢环夹取气缸。
具体实施方式
22.有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图1-6实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的结构内容,均是以说明书附图为参考。
23.下面将参照附图描述本发明的各示例性的实施例。
24.实施例一,钢环上下料组件1固定在机架4上,晶圆上料组件2固定在机架4上,钢环搬运机械手组件固定在机架4上,晶圆取片机械手5固定在机架4上,钢环规整组件6固定在机架4上,晶圆寻边组件7固定在机架4上,晶圆搬运机械手8固定在机架4上,刚环取片机械手固定在机架4上。
25.晶圆分层放置在晶圆料盒22中,如图3所示;如图2所示,晶圆料盒放置在晶圆料盒支撑平台22上,晶圆料盒支撑平台22和晶圆上料模组23的移动块固定连接,晶圆上料电机24固定在晶圆上料模组23上,晶圆上料模组23固定在机架4上。晶圆上料电机24带动晶圆上料模组23的移动块上下移动,放置在晶圆料盒支撑平台22上的晶圆料盒21可随之上下运动,完成晶圆上料。
26.如图4、图5所示,带座轴承81固定在机架4上,晶圆转运丝杠82通过带座轴承81中的轴承固定在带座轴承81上,晶圆转运丝杠82可在两个带座轴承81中转动,晶圆转运丝杠的一端固定有一个晶圆转运带轮85,晶圆转运电机84固定在机架4上,晶圆转运电机84的轴上固定有一个晶圆转运带轮84,两个晶圆转运带轮84上绕有晶圆转运皮带86,晶圆转运电机84可通过两个晶圆转运带轮84和晶圆转运皮带86驱动晶圆转运丝杠82转动;晶圆转运直线导轨89固定在机架4上,晶圆转运直线导轨89的移动滑块上固定有晶圆吸盘连接板83,晶圆吸盘连接板83同时还固定在晶圆转运丝杠82的螺母座上,晶圆转运丝杠82转动时,晶圆吸盘连接板83和可随螺母座移动,晶圆转运直线导轨89上的移动滑块随之移动,晶圆吸盘连接板83上固定有晶圆转运气缸88,晶圆转运气缸88的移动导杆上固定有晶圆吸盘支撑板
87,晶圆吸盘90通过弹簧80固定在晶圆吸盘支撑板87上,晶圆吸盘90受力时在弹簧80的作用下可有一定的移动空间,晶圆吸盘90受力消失时在弹簧80的作用下回复原位。
27.刚环和通过薄膜贴有晶圆的钢环分层放置在钢环料框11中;如图6所示,钢环料框11放置在钢环料框支撑平台12上,钢环料框支撑平台12和钢环上下料直线模组13的移动块固定连接,钢环上下料电机14固定在钢环上下料模组13上,钢环上下料模组13固定在机架4上。钢环上下料电机14带动钢环上下料模组13的移动块上下移动,放置在钢环料框支撑平台12上的钢环料框11可随之上下运动,完成钢环的上下料。
28.如图7,图8所示,取钢环模组91固定在机架4上,取钢环电机92固定在取钢环模组91上,取钢环电机92可带动取钢环模组91上的移动块沿模组方向移动,钢环夹片下连接板93固定在取钢环模组91的移动块上,钢环下夹片95固定在钢环夹片下连接板93上,钢环夹片上连接板94固定在钢环模组下连接板93上,钢环夹取气缸97固定在钢环夹片上连接板94上,钢环上夹片96固定在钢环夹取气缸97的移动导杆上。
29.规整电机固定板68固定在机架4上,规整电机65固定在规整电机固定板68上,两个钢环规整导轨67固定在机架4上,两个钢环规整导轨67上分别有四个移动滑块,上侧的齿条连接板62固定连接两个钢环规整导轨67上侧的两个移动滑块,下侧的齿条连接板62固定连接两个钢环规整导轨67下侧的两个移动滑块;上下两个齿条连接板62分别固定有一个齿条63,齿轮64固定在规整电机65的轴上,两个齿条63同时和齿轮64啮合,齿轮64转动时,两个齿条连接板62可同时向齿轮64的方向移动,齿轮64反向转动时,两个齿条连接板可同时向远离齿轮64的方向移动;两个规整滑槽连接板66分别固定在两个齿条连接板62上,两个规整滑槽连接板66上分别固定有一个滑槽61;两个规整滑槽61可根据齿轮64的转动方向同时向中间靠拢,或同时向两边远离。
30.如图9所示,钢环搬运模组36固定在机架4上,钢环搬运电机37固定在钢环搬运模组36上,钢环搬运电机67可驱动钢环搬运模组36上的移动块运动,钢环搬运模组36的移动滑块上固定有钢环搬运气缸连接板35,钢环搬运气缸连接板35上固定有钢环搬运气缸34,钢环搬运气缸34的移动导杆上固定有钢环搬运机械手连接板33,钢环搬运机械手连接板33固定有钢环吸盘连接板32,钢环吸盘连接板32和钢环搬运机械手连接板33的螺钉孔用腰形孔,可方便调节钢环吸盘31之间的距离;钢环吸盘连接板32上固定有钢环吸盘31,钢环吸盘31通真空,真空阀门打开即可吸附钢环。
31.该实施例在使用的时候,晶圆贴膜过程中,晶圆上料组件2将晶圆料盒21中的晶圆料盒21移动到待取位置;晶圆取片机械手5移动至晶圆上料组件2的晶圆料盒21中夹取晶圆后从晶圆料盒21中退出并定位夹取晶圆的圆心;晶圆机械手5再将晶圆转运至晶圆寻边组件7上,晶圆寻边组件7可寻找到晶圆上的缺口或平边,并将缺口或平边对准指定方向。晶圆搬运机械手8移动至晶圆寻边组件7的上方,吸附晶圆并将晶圆移动至指定位置,方便进行下一步工序。钢环上下料组件1将钢环料框11移动到待取位置,刚环取片机械手9移动至取片位置夹住钢环,并使刚环随运动,运动过程中钢环在规整组件6的滑槽上滑动,待钢环滑至指定位置,钢环取片机械手9松开钢环并移动至初始位置。钢环留在规整组件6的滑槽61上。钢环规整组件6规整钢环至中间,钢环搬运机械手3移动至规整后的钢环上方,并吸附钢环将钢环搬运至指定位置惊醒下一步工序;钢环和晶圆贴膜完成后,钢环搬运机械手3吸附钢环,并将贴有晶圆的钢环移动至规整组件6的滑槽61上,此时钢环上下料组件将钢环料框
11移动至下料位置,钢环取片机械手将贴有钢环的晶圆推至钢环料框中,钢环存放在贴晶圆前的原始位置。
32.晶圆上料过程中,晶圆上料电机24转动并带动晶圆上料模组23的移动快上下运动,固定在晶圆上料模组23移动块上的晶圆料框支撑平台随之上下运动,晶圆移动至待取位置,晶圆上料电机24停止转动,晶圆取片机械手5取片完成后,晶圆上料电机24继续转动,下一个晶圆移动至待取位置。晶圆料盒21中的全部晶圆取完后,晶圆上料电机24反向转动,晶圆料盒21移动至初始位置,取下晶圆料盒21更换为装满晶圆的料盒即可即进行下一次取片。
33.晶圆寻边组件7寻找到晶圆上的缺口或平边后,将晶圆上的缺口或者平边朝向指定方向,晶圆转运电机84转动并通过两个晶圆转运带轮85和晶圆转运皮带86带动晶圆转运丝杠82转动,晶圆转运丝杠82转动带动丝杠上的螺母座移动,螺母座上固定有将晶圆吸盘90移动至晶圆寻边组件7的上方后,晶圆转运气缸88的导杆伸出,晶圆吸盘90和晶圆贴合,晶圆吸盘90和晶圆转运气缸88的导杆中间的弹簧可保证晶圆吸盘90不会将晶圆压碎。晶圆吸盘90和晶圆贴合后,晶圆吸盘90上的真空打开,晶圆吸盘90便吸附住晶圆,晶圆转运气缸88的导杆缩回。晶圆转运电机84转动,将晶圆移动至指定位置后,晶圆转运气缸88的导杆伸出,晶圆吸盘上的真空关闭,晶圆转运气缸88的导杆缩回,晶圆便留在指定位置。晶圆转运电机84转动,晶圆吸盘90移动至初始位置。
34.钢环上料过程中,钢环上下料电机14转动并带动钢环上下料直线模组13的移动快上下运动,固定在钢环上下料模组13移动块上的晶圆料框支撑平台随之上下运动,钢环移动至待取位置,钢环上下料电机14停止转动,钢环取片机械手5取片完成后,钢环上下料电机14继续转动,下一个钢环移动至待取位置。钢环贴片完成后,钢环上下料电机14转动,将钢环原始存放位置移动至取料位置,待钢环取片机械手5将贴膜完成后的钢环退回钢环料框11中后,钢环上下料电机转动,进行下一个钢环的取片。钢环料框11中的全部钢环贴片完成并收回钢环料框11中后,钢环上下料电机24反向转动,钢环料盒11移动至初始位置,取下钢环料框11更换为装满钢环的料框即可即进行下一次取片。
35.取钢环和规整过程中,取钢环电机92转动并带动取钢环模组91的移动块移动,取钢环模组91的移动快及固定在其上的零件移动至夹取钢环的位置后,钢环夹取气缸97的导杆伸出,钢环上夹片96和钢环下夹片95便夹住钢环,取钢环电机92反向转动并将钢环从刚环料框11中拉出,钢环从刚环料框11中拉出后在滑槽61上随取钢环模组91的移动块移动,钢环移动至指定位置后,钢环夹取气缸97的导杆收回,钢环上夹片96和钢环下夹片95便松开钢环,取钢环电机92继续转动,钢环上夹片96和钢环下夹片95离开钢环,钢环留在滑槽61上;规整电机65转动,两个滑槽61向中间靠拢,并将钢环夹住;待钢环搬运机械手组件3将钢环取走后,规整电机65转动,两个滑槽61向两边分离;钢环搬运机械手组件3将贴膜后的钢环移动至滑槽61上后,钢环夹取气缸97的导杆伸出,钢环下夹片95和钢环上夹片96加紧,取钢环电机92转动,钢环下夹片95和钢环上夹片96将钢环推至钢环料框11中。取钢环电机92反向转动,钢环下夹片95移动至初始位置,钢环夹取气缸97的导杆缩回,钢环下夹片95和钢环上夹片96由夹紧变为松开。
36.钢环搬运过程中,钢环规整完成后,钢环搬运电机37转动并带动钢环搬运模组36的移动块运动,钢环搬运模组36移动块上固定的零件随之运动,待钢环吸盘31移动至规整
后的钢环上方后,钢环搬运气缸34的导杆伸出,钢环吸盘31和钢环贴合,钢环吸盘31的真空打开,钢环吸盘31吸附住钢环,钢环搬运气缸34的导杆缩回,钢环搬运电机37转动,将刚环搬运至指定位置后,钢环搬运气缸34的导杆伸出,钢环吸盘31的真空关闭,钢环搬运气缸34的导杆缩回;钢环贴膜完成后,钢环搬运电机37转动,钢环吸盘31移动至贴膜后的刚环的上方,钢环搬运气缸34的导杆伸出,钢环吸盘31的真空打开,钢环吸盘31吸附钢环,钢环搬运气缸34的导杆缩回,钢环搬运电机37转动,钢环吸盘31将贴膜后的钢环移动至钢环规整组件6上方,钢环搬运气缸34的导杆伸出,钢环吸盘31的真空关闭,钢环搬运气缸34的导杆收回,贴膜后的钢环留在刚环规整组件6的滑槽61上,待钢环取片机械手9将贴片后的钢环推回钢环料框11中。
37.上面所述只是为了说明本发明,应该理解为本发明并不局限于以上实施例,符合本发明思想的各种变通形式均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1