具有不同规格的物体的运输的制作方法
本发明涉及一种用于运输物体、优选容器的装置和方法。
背景技术:
1、容器处理设备通常由一系列不同的依次布置的处理站组成。容器在这些处理站上经受各种处理。在此,例如可以涉及灌装过程、封闭过程或贴标签过程。为了在这些站之间运输容器,存在多种可能性。存在按节拍工作的机器,例如这些机器被用于生产饮料纸盒。在此,容器的运输大多通过链条进行。在用于灌装饮料容器的机器中通常使用传送星轮,该传送星轮将容器运输通过设备。
2、在用于制造、灌装和包装饮料和液体食品的设备和机器中运输容器、例如瓶或罐时的当前发展趋势是线性马达技术,例如以长定子线性马达系统或短定子线性马达系统的形式。在一种长定子线性电动机系统中,可以使用一种具有电磁体的位置固定的长定子来实现装备有永磁体的运动装置的运动。而在短定子线性马达系统中,所述运动装置可以分别具有由电磁体构成的短定子,该短定子为了使运动装置运动可以与位置固定的永磁体磁性地相互作用。运动装置(也被称为“梭动件”或“推动器”)可以使一个或多个容器分别运动。线性马达技术的一大优点在于运动装置可以单独地或分开地并且彼此单独地被操控。
3、wo2019/159116a1公开了一种用于处理或传送容器的机器,该机器包括沿着用于输送容器的输送方向延伸的导向件以及依次相继可滑动地安装在同一导向件上的用于支承所述容器的多个托架。所述导向件和每个托架一起限定相应的线性电动机。每个支承托架包括特别是沿着同一导向件分别安装在不同的且依次相继的托架上的两个夹持器件。所述托架可朝向彼此运动或可运动远离彼此,以调节沿着用于输送所述容器的输送方向的相互距离并且根据待取出或待释放的容器的类型来限定所述两个夹持器件之间的夹持区域。
4、ep3109189a1公开了一种用于沿着传送路径运输一系列包装单元的传送装置。该传送装置包括:第一连续载体,其具有平行于传输路径的至少一个可操作分支;至少一个第一输送元件,其沿着第一连续载体向前运动;第二连续载体,其与第一连续载体相邻且具有平行于传送路径和可操作分支的至少一个可操作分支;以及至少一个第二输送元件,其独立于第一输送元件被控制并且沿着第二连续载体被向前运动。所述第一输送元件和第二输送元件配置成,从而能够将一个相应的包装单元保持在它们之间并且沿着传送路径使这样的包装向前运动。
5、本发明的任务在于,这样进一步改进之前所述的技术,使得能够以简单的方式在不改装该装置的情况下优选以尽可能小的间距运输不同规格的物体、优选容器。
技术实现思路
1、所述任务通过独立权利要求的特征来解决。有利的进一步改进方案在从属权利要求和说明书中给出。
2、本公开内容的一个方面涉及一种用于沿着运输路径运输物体、优选容器的装置,该装置具有至少一个(例如封闭的或环绕的)导轨。该装置还具有用于运输物体的第一运动装置和第二运动装置。所述第一运动装置和第二运动装置交替地依次相继沿着所述至少一个导轨被引导并且可以优选借助于长定子线性驱动器或者短定子线性驱动器被单独驱动。该装置还包括控制单元,该控制单元配置用于以第一运行模式和第二运行模式运行该装置。在所述第一运行模式和第二运行模式中,物体分别由一个所述第一运动装置和一个所述第二运动装置组成的对来运输。在第一运行模式中,将所述对构成使得第一运动装置在运输路径的方向上定位在相应的对的第二运动装置的前面。在第二运行模式中,将所述对构成使得第二运动装置在运输路径的方向上定位在相应的对的第一运动装置的前面。
3、有利地,该装置能够实现在没有机械规格调整的情况下在运动装置上运输不同的物体、优选容器。此外,可以实现相对小的间距(在依次相继运输的物体之间的距离),这对于高的机器功率是重要的。在规格变换时,用于运输物体的运动装置的协同作用可以变换。对于第一组物体(例如小容器),该装置可以以第一运行模式运行。对于第二组物体(例如大容器),该装置可以以第二运行模式运行。对于规格变换,可以在第一与第二运行模式之间进行变换,而不需要耗时且成本高地机械改装该装置。因此,可以以简单的方式单纯在控制技术上通过变换运行模式来实施规格变换。
4、例如,第一运动装置和第二运动装置可以构造用于悬挂地、支承地或在地面上滑动地运输物体。
5、优选地,第一运动装置和第二运动装置沿着相同的导轨被引导。
6、在一个实施例中,所述控制单元配置用于在第一运行模式中运行用于运输第一规格的物体的装置,并且在第二运行模式中运行用于运输与第一规格优选在形状和/或尺寸方面不同的第二规格的物体的装置。
7、在另一个实施例中,第一运动装置和第二运动装置彼此不同,优选在用于物体的支承的布置结构和/或配置方面不同。有利地,第一运动装置和第二运动装置因此可以适配于非常不同的规格和/或在运输时尽管物体可以是相对大的也能够实现非常小的间距。
8、也可能的是,第一运动装置和第二运动装置结构相同地、但不同程度地相对于所述至少一个导轨定向,其中,优选第二运动装置围绕第二运动装置的相应的俯仰轴线相对于第一运动装置旋转基本上180°。
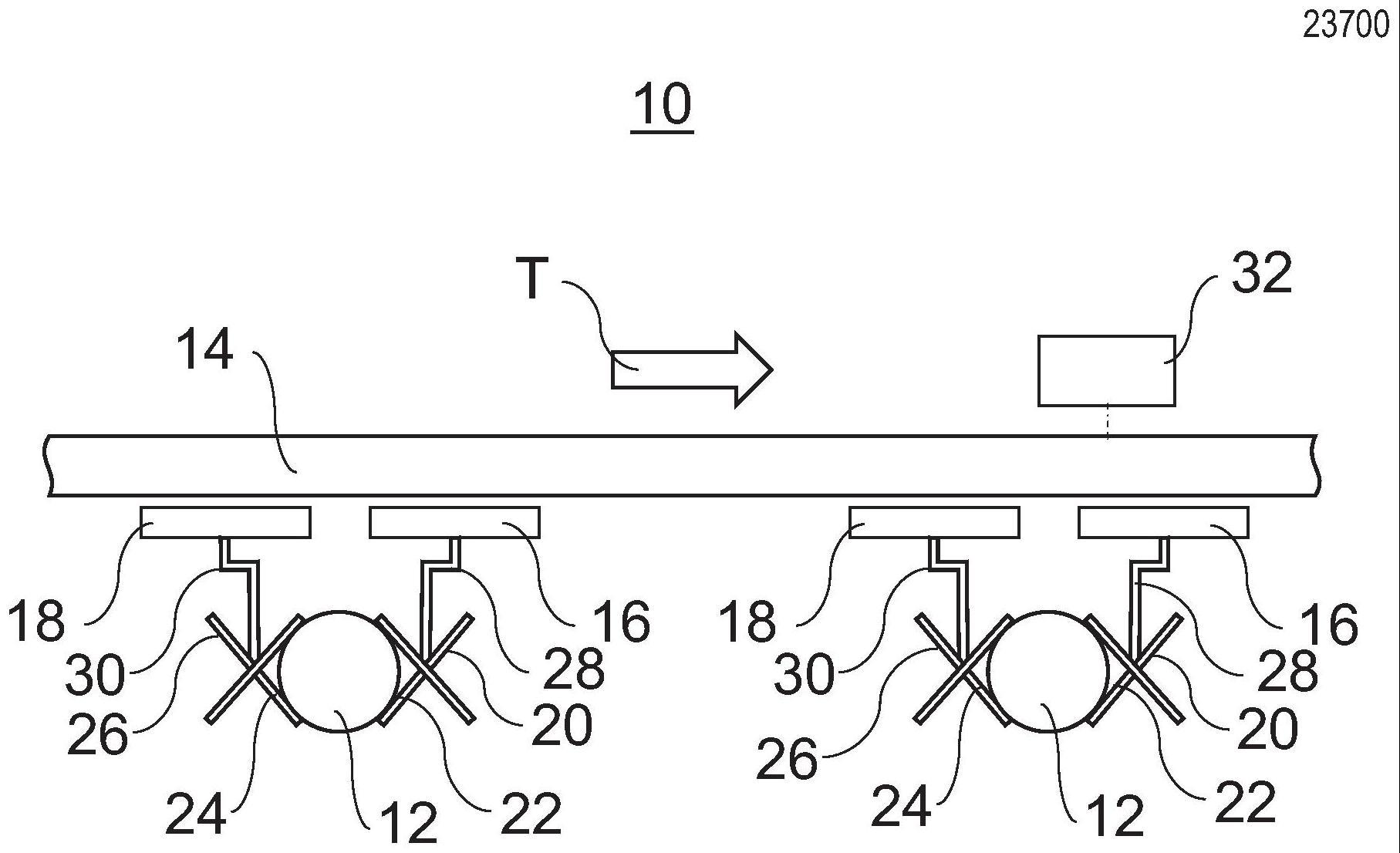
9、在另一个实施例中,第一运动装置和第二运动装置分别具有沿传输路径方向定向的、优选v形的、环形部段形的或平面的第一支承区段,以及与传输路径方向相反定向的、优选v形的环形部段形的或平面的第二支承区段,以用于在传输过程中支承物体。优选地,在第一运行模式中,物体分别支承在第一运动装置的第二支承区段与第二运动装置的第一支承区段之间。替代地或附加地,在第二运行模式中,物体分别支承在第一运动装置的第一支承区段与第二运动装置的第二支承区段之间。
10、优选地,在第一运行模式中,所述相应对的第一运动装置的第二支承区段和第二运动装置的第一支承区段可以朝向彼此。
11、优选地,在第二运行模式中,所述相应对的第一运动装置的第一支承区段和第二运动装置的第二支承区段可以朝向彼此。
12、在一个实施方式中,第一运动装置的第一支承区段在结构上与第一运动装置的第二支承区段不同地实施。优选地,第二运动装置的第一支承区段在结构上与第一运动装置的第二支承区段相同地实施,和/或第二运动装置的第二支承区段在结构上与第一运动装置的第一支承区段相同地实施。因此,例如可以有利地实现具有非常不同规格的物体(例如具有圆锥形的容器和具有圆柱形的容器)可以同样由该装置运输。例如,在第一运行模式中,可以运输圆锥形的容器。具有圆柱形的容器又可以在第二运行模式下运输。
13、在另一个实施方式中,第一运动装置的第一支承区段、第一运动装置的第二支承区段、第二运动装置的第一支承区段和/或第二运动装置的第二支承区段在结构上相同地实施。所述支承区段的结构上的实施方案在该实施方式中已经可以是有利的,使得物体的不同规格可以利用相同的支承区段来支承以用于运输。
14、在另一个实施例中,第一运动装置的第一支承区段相对于运输路径的方向向后错开,和/或第二运动装置的第二支承区段相对于与运输路径的方向相反的方向向后错开。替代地或附加地,第一运动装置的第二支承区段可以朝向与运输路径的方向相反的方向突出,和/或第二运动装置的第一支承区段可以相对于运输路径的方向突出。因此,在运输大的物体时可以有利地实现小的间距。
15、在一个实施变型方案中,第一运动装置和第二运动装置分别具有一个支承臂,所述支承臂优选在支承臂的相同端部上承载相应的运动装置的第一支承区段和第二支承区段。优选地,第一运动装置的支承臂和第二运动装置的支承臂可以彼此相反地折弯。有利地,支承臂的折弯部因此可以在第二运行模式中、例如在大物体的情况下向外指向。在小物体的情况下,支承臂的折弯部可以在第一运行模式中向内指向。以这种方式,即使在大容器的情况下也可以实现这样的间距,该间距明显小于在运动装置的刚性相配的情况下可以实现的间距。
16、本公开内容的另一个方面涉及一种用于沿着运输路径运输物体、优选容器的装置,该装置具有至少一个(例如封闭的或环绕的)导轨。该装置具有多个用于运输物体的运动装置,其中,所述多个运动装置沿着所述至少一个导轨被引导,并且可以优选借助于长定子线性驱动器或者短定子线性驱动器被单独驱动。该装置具有控制单元,该控制单元配置用于控制所述多个运动装置,使得由所述多个运动装置中的至少三个组成的相应一个组共同将定位在其自身之间的、优选夹紧的物体沿着运输路径运输直至用于转送物体的装置的转送区域。
17、有利地,该装置能够实现在不改装运动装置的情况下实现在可运输的规格方面非常高的灵活性。通过所述至少三个运动装置与物体的多个接触点,几乎可以运输任何适当的轮廓。规格调整又可以以简单的方式单纯在控制技术上通过改变运动装置彼此间的布置结构来实现。可以放弃在规格变换时对运动装置进行耗时且成本高的机械改装。
18、在一个实施例中,所述控制单元配置为使得这些组分别由所述多个运动装置中的恰好三个构成,其中,该物体优选以三点支承的方式由相应组的恰好三个运动装置支承或承载优选在该物体的周边面或者说周壁面上。有利地,由此可以减少最小可能的间距,并且此外不会使用不必要多的用于运输物体的运动装置。
19、在另一个实施例中,所述至少一个导轨具有第一导轨和第二导轨,它们基本上平行地延伸并且彼此相叠地布置。所述控制单元配置用于构成所述组中的第一组,使得所述第一组的三个运动装置中的一个在第一导轨上被引导,而所述第一组的三个运动装置中的另外两个在第二导轨上被引导。此外,所述控制单元还配置用于构成是所述组中的优选直接跟随第一组的第二组,使得所述第二组的三个运动装置中的两个在第一导轨上被引导,而所述第二组的三个运动装置中的另一个在第二导轨上被引导。有利地,由此可以特别有效地减小可能的最小间距,因为依次相继的物体可以非常靠近地一起被运输。
20、优选地,在该装置的俯视图中的所述第一组和第二组或者说所述组在运输期间能够从上方相互重叠。
21、在另一个实施例中,所述控制单元配置为使得这些组分别由所述多个运动装置中的恰好四个构成,其中,该物体优选以四点支承的方式由相应组的恰好四个运动装置支承或承载优选在该物体的周边面或者说周壁面上。有利地,所述四点支承能够实现关于可运输物体的可能的轮廓的特别大的灵活性。
22、优选地,所述至少一个导轨可以具有第一导轨和第二导轨,它们基本上平行地延伸并且彼此相叠布置。所述控制单元可以优选配置用于构成所述组,使得每组所述四个运动装置中的两个运动装置在第一导轨上被引导,并且所述四个运动装置中的另外两个运动装置在第二导轨上被引导。
23、本发明的另一方面涉及一种用于处理容器的处理设备,该处理设备包括如在本文中公开的装置。有利地,通过该装置能够实现使所述处理设备的可达到的间距(距离)最小化,因为所述间距能够匹配于在将物体运输通过该装置时可达到的最小间距或者能够对应于所述最小间距。如所解释的,该装置能够实现所述运动装置可以非常接近地聚集以获得小的间距,例如以便使两个依次相继的灌装阀的距离保持得尽可能小。
24、优选地,所述处理设备可以构造用于制造、清洁、涂覆、检查、灌装、封闭、贴标签、打印和/或包装用于液体介质、优选饮料或液体食品的容器。
25、例如,所述容器可以实施为瓶、罐、桶、纸盒、小玻璃瓶等。
26、优选地,所述处理设备可以具有多个用于由所述装置运输的容器的处理站(例如灌装站、封闭站和/或贴标签站),其中,所述多个处理站沿着所述至少一个导轨布置。如果例如在灌装机中多个、例如五个灌装阀依次定位在该导轨上,则该装置可以使多个或者说五个容器始终同时运动到这些灌装阀下方并且在那里进行灌装。在灌装过程结束之后,该装置使多个或者说五个已灌装的容器继续运动,并且多个或者说五个新的、空的容器由该装置运动到灌装阀下方。因为该装置能够实现非常小的间距或非常小的分开距离,所以变换可以需要相对少的时间,从而可提高效率。
27、优选地,术语“控制单元”可以涉及电子装置(例如实施为驱动电路或具有微处理器和数据存储器),其可以根据构型承担控制任务和/或调节任务和/或处理任务。即使在此使用术语“控制”,这也可以相当合适地包括或意味着“调节”或“具有反馈的控制”和/或“处理”。
28、本公开内容的另一方面涉及一种用于借助优选如在此公开的装置运输具有不同规格的物体、优选容器的方法,所述装置具有至少一个(例如封闭的或环绕的)导轨以及用于运输物体的第一运动装置和第二运动装置,其中,所述第一运动装置和第二运动装置交替地依次相继沿着所述至少一个导轨被引导并且可以优选借助于长定子线性驱动器或者短定子线性驱动器被单独驱动。该方法包括借助由第一运动装置和第二运动装置组成的对运输具有第一规格的物体(例如在第一运行模式中和/或由该装置的控制单元控制),其中,第一运动装置在运输路径的方向上定位在所述对的第二运动装置的前面。该方法包括借助由第一运动装置和第二运动装置组成的对传输具有与第一规格优选在尺寸和/或形状方面不同的第二规格的物体(例如在第二运行模式中和/或由该装置的控制单元控制),其中,第二运动装置在传输路径的方向上定位在所述对的第一运动装置的前面。有利地,借助该方法可以实现已经关于相应的装置描述的相同优点。
29、本公开内容的另一方面涉及一种用于借助优选如在此描述的装置运输具有不同规格的物体、优选容器的方法,所述装置具有至少一个(例如封闭的或环绕的)导轨以及多个用于沿着运输路径运输物体的运动装置,其中,所述多个运动装置沿着所述至少一个导轨被引导,并且可以优选借助于长定子线性驱动器或者短定子线性驱动器被单独驱动。该方法包括:分别借助由所述至少三个运动装置(例如恰好三个或恰好四个运动装置)组成的组沿着运输路径将不同规格的物体运输直至用于转送物体的装置的转送区域,所述运动装置共同将物体定位、优选夹紧在其自身之间,其中,为了运输物体,根据待运输物体的相应规格来调节所述至少三个运动装置彼此间的布置结构,优选用于实现(例如柔性的)三点支承或(例如柔性的)四点支承。有利地,借助该方法可以实现已经关于相应的装置描述的相同优点。
30、这里使用的涉及与运输路径的方向有关的术语可以优选理解为,所述关系涉及运输路径的相应运动装置所定位的那个区段的方向。
31、本发明的之前所述的优选实施方式和特征可以任意相互组合。
- 还没有人留言评论。精彩留言会获得点赞!