一种智能仓库用上下料机器人的制作方法
1.本发明属于上下料机器人技术领域,具体涉及一种智能仓库用上下料机器人。
背景技术:
2.上下料机器人属于工业机器人的一种,通过五轴运行的机械手与抓取结构用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.上下料机器人对于不同的目标产品具有不同的抓取结构,其中,对于如图8所示的袋装码垛产品进行下料时,袋装产品具有一定的重量(如水泥、尿素、粮食等),且袋与袋之间互相堆叠,常见的袋装产品码垛机械手如图2中的所示的抓钩结构,这种结构只适合码垛,应对下料时,无法直接伸到袋子下方进行抓取,容易刺破袋子接触的位置。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种用于袋装产品的智能仓库用上下料机器人。
5.本发明通过以下技术方案来实现上述目的:
6.一种智能仓库用上下料机器人,用于对袋装产品进行码垛或下料,包括机械手、位于机械手端部的抓钩基板、设置于抓钩基板两侧的若干个抓钩,所述抓钩基板的一端设置有侧延块,所述侧延块的一侧表面设置有两个由第二电机驱动相向运动的延伸杆,所述延伸杆的底端设置有用于抬起袋装产品的横杆,所述延伸杆的底端还设置有与横杆平行且滑动连接的前进杆,所述前进杆用于使横杆前进挤入袋装产品的下方,方便抬起袋装产品。
7.作为本发明的进一步优化方案,所述抓钩通过转轴转动连接在抓钩基板的两侧,且所述侧延块的末端设置有用于驱动转轴的第一电机,抓钩是常见的用于袋装产品码垛的夹取装置,通过第一电机驱动开合进行常规的码垛上料功能。
8.作为本发明的进一步优化方案,所述延伸杆通过双向螺纹杆驱动延伸杆进行同步远离/相向运动,所述螺纹杆设置于侧延块侧表面,由设置于侧延块端部的第二电机驱动旋转,且所述螺纹杆表面的双向螺纹分别对应设置有两个用于带动延伸杆移动的内螺纹滑块,用于驱动延伸杆相向运动,使前进杆挤入袋装产品的缝隙,方便抬起。
9.作为本发明的进一步优化方案,所述延伸杆的底端旋转设置有旋转块,所述旋转块用于与横杆相连,其中,所述旋转块由设置于延伸杆底端的第三电机驱动旋转,且所述第三电机具有锁止功能,这种设置是为了让横杆调整位置,不影响抓钩的正常上料工作。
10.作为本发明的进一步优化方案,所述前进杆通过限位环滑动连接在横杆表面,且所述前进杆由驱动组件驱动进行往复滑动,驱动组件包括设置于旋转块表面的第四电机、设置于第四电机轴端的转盘、设置于转盘表面与前进杆铰接的连杆,方便前进杆沿着袋装产品缝隙移动,防止刺破包装袋。
11.作为本发明的进一步优化方案,所述前进杆与横杆之间通过滚轮互相受力,所述
横杆侧表面设置有用于安装滚轮的侧槽,所述前进杆的侧表面设置有与滚轮接触的凹槽,其中,所述前进杆与滚轮之间设置有防止前进杆倾斜的限位件,所述限位件包括设置在凹槽表面的弧形限位槽、以及设置于滚轮表面边缘处的限位杆,前进杆与横杆之间通过滚轮设置可以减少滑动摩擦力,设置限位件是为了防止前进杆脱离横杆发生倾斜。
12.作为本发明的进一步优化方案,所述前进杆远离横杆的一侧表面设置有弧形面,方便挤入包装袋的缝隙中。
13.作为本发明的进一步优化方案,所述横杆宽度呈渐变状,且远离旋转块的一端变窄,提高横杆的受力能力,且渐变的形状使得横杆可以进入包装袋之间的缝孔中。
14.作为本发明的进一步优化方案,所述横杆的上下表面平行旋转设置有细轴,减少横杆的移动阻力。
15.本发明的有益效果在于:
16.本发明设置横杆和前进杆,在对堆垛的袋装产品进行下料时,横杆与前进杆挤入袋装产品的缝孔,然后横杆向相运动,通过前进杆破开袋装产品件的缝隙,使横杆移动到足够托起袋装产品的位置,然后使袋装产品悬空后对袋装产品进行抓取操作,对于堆垛的袋装产品具有良好的下料作用,且不会刺破包装袋。
附图说明
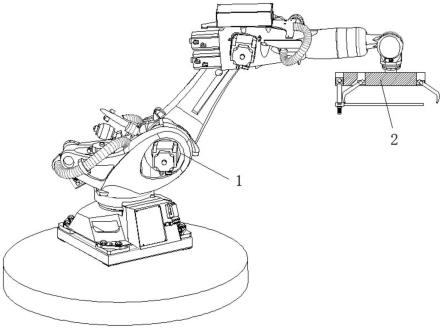
17.图1是本发明的整体结构示意图;
18.图2是本发明的抓钩基板结构示意图;
19.图3是本发明的抓钩基板结构侧视图;
20.图4是本发明图3中a-a向剖视图;
21.图5是本发明的俯视图图4中b-b向剖视图;
22.图6是本发明图4中c部分结构剖视放大图;
23.图7是本发明图4中去除滚轮后的示意图;
24.图8是本发明适用的袋装产品堆垛示意图;
25.图中:1、机械手;2、抓钩基板;21、转轴;22、抓钩;23、第一电机;3、侧延块;31、螺纹杆;32、内螺纹滑块;33、第二电机;34、延伸杆;35、旋转块;36、第三电机;37、横杆;38、细轴;4、前进结构;41、限位环;42、前进杆;43、第四电机;44、转盘;45、连杆;371、侧槽;372、滚轮;373、限位杆;421、凹槽;422、弧形限位槽。
具体实施方式
26.下面结合附图对本技术作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本技术进行进一步的说明,不能理解为对本技术保护范围的限制,该领域的技术人员可以根据上述申请内容对本技术作出一些非本质的改进和调整。
27.实施例1
28.如图1-7所示,一种智能仓库用上下料机器人,用于对袋装产品进行码垛或下料,包括机械手1、位于机械手1端部的抓钩基板2、设置于抓钩基板2两侧的若干个抓钩22,抓钩22通过转轴21转动连接在抓钩基板2的两侧,且侧延块3的末端设置有用于驱动转轴21的第一电机23,第一电机23通过转轴21带动抓钩22开合,进而实现袋装产品的抓取,该抓钩22结
构适用于码垛时的上料。
29.抓钩基板2的一端设置有侧延块3,侧延块3的一侧表面设置有两个由第二电机33驱动相向运动的延伸杆34,延伸杆34通过双向螺纹杆31驱动延伸杆34进行同步远离/相向运动,螺纹杆31设置于侧延块3侧表面,由设置于侧延块3端部的第二电机33驱动旋转,且螺纹杆31表面的双向螺纹分别对应设置有两个用于带动延伸杆34移动的内螺纹滑块32。
30.延伸杆34的底端旋转设置有旋转块35,旋转块35由设置于延伸杆34底端的第三电机36驱动旋转,且第三电机36具有锁止功能,延伸杆34的底端设置有用于抬起袋装产品的横杆37,延伸杆34的底端还设置有与横杆37平行且滑动连接的前进杆42,前进杆42用于使横杆37前进挤入袋装产品的下方,方便抬起袋装产品。
31.在使用时,首先机械手1移动,使横杆37和前进杆42插入如图8所示的缝孔中,然后第二电机33带动两个延伸杆34相向运动,同时第四电机43带动前进杆42来回滑动,横杆37从如图8所示的缝孔向缝隙挤入,前进杆42则用于破开缝隙,使横杆37顺利进入,直到横杆37的位置足以将袋装产品抬起时,机械手1升起,通过横杆将袋装产品抬起,袋装产品悬空后,第一电机23带动抓钩22转动,将袋装产品抓起,进行下料。
32.为了方便前进杆42来回滑动,前进杆42通过限位环41滑动连接在横杆37表面,且前进杆42由驱动组件驱动进行往复滑动,驱动组件包括设置于旋转块35表面的第四电机43、设置于第四电机43轴端的转盘44、设置于转盘44表面与前进杆42铰接的连杆45。
33.为了减少前进杆42与横杆37之间的滑动摩擦力,前进杆42与横杆37之间通过滚轮372互相受力,横杆37侧表面设置有用于安装滚轮372的侧槽371,前进杆42的侧表面设置有与滚轮372接触的凹槽421,其中,前进杆42与滚轮372之间设置有防止前进杆42倾斜的限位件,限位件包括设置在凹槽421表面的弧形限位槽422、以及设置于滚轮372表面边缘处的限位杆373,限位件用于防止前进杆42倾斜,使前进杆42始终与横杆37保持平行。
34.为了防止前进杆42滑动时划破包装袋,前进杆42远离横杆37的一侧表面设置有弧形面,方便挤入包装袋的缝隙中。
35.横杆37宽度呈渐变状,且远离旋转块35的一端变窄,提高横杆37的受力能力,且渐变的形状使得横杆37可以进入包装袋之间的狭小的缝孔中。
36.为了减少横杆37在包装袋之间移动时产生的摩擦力,横杆37的上下表面平行旋转设置有细轴38。
37.实施方式具体为:使用本上下料机器人进行上料时,使第三电机36带动旋转块35旋转,将横杆37和前进杆42旋转至远离抓钩22的一侧,方便抓钩22进行上料,由于上料码垛时,抓钩22从传输线上抓取袋装产品,抓钩22贴近袋装产品下方收紧即可,若对堆垛好的袋装产品进行下料,则需要先使袋装产品悬空分离,与下方的袋装产品脱离堆叠,然后采用抓钩22进行抓取,具体通过横杆37插入袋装产品之间的缝孔中,然后通过第二电机33带动使横杆37和前进杆42向袋装产品的缝隙中挤入,挤入的过程中通过第四电机43带动前进杆42来回滑动,方便破开缝隙,直到横杆37到达足以托起袋装产品的位置时,机械手升起,使袋装产品悬空,然后如图2所示,抓钩22由实线位置旋转到虚线位置将袋装产品抓住并托起,第三电机36带动旋转块35旋转,使横杆37和前进杆42旋转至另一侧,此时通过抓钩22对袋装产品进行下料。
38.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并
不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1