两段式装车机和装车方法与流程
本发明涉及装车,具体而言,涉及一种两段式装车机和装车方法。
背景技术:
1、在货物进行运输之前,通常需要对货物进行装车。而为了实现装车自动化,以减少人工作业,装车机的应用逐渐广泛。
2、现有技术采用分别使用长大臂、框架前移加长大臂、两级大臂三种结构方式来对前方位置进行装车操作。在对有鹅颈平台的货车进行装车工作时,由于鹅颈平台较长,均需要较长的大臂,存在诸多问题:
3、①过长的大臂使装车机器人本体较长、存在空间限制;
4、②码盘装载货箱时,较长的大臂需要承载很大的力矩,同样也需要相应的配重对其平衡;
5、③大臂行程较长,在力矩较大的情形下速度更慢,由此造成的效率低下。
技术实现思路
1、本发明的目的包括,例如,提供了一种两段式装车机和装车方法,其能够减小装车大臂的长度,从而改善现有技术因为大臂过长导致的空间性限制、需要平衡过大力矩和装车效率低下的问题。
2、本发明的实施例可以这样实现:
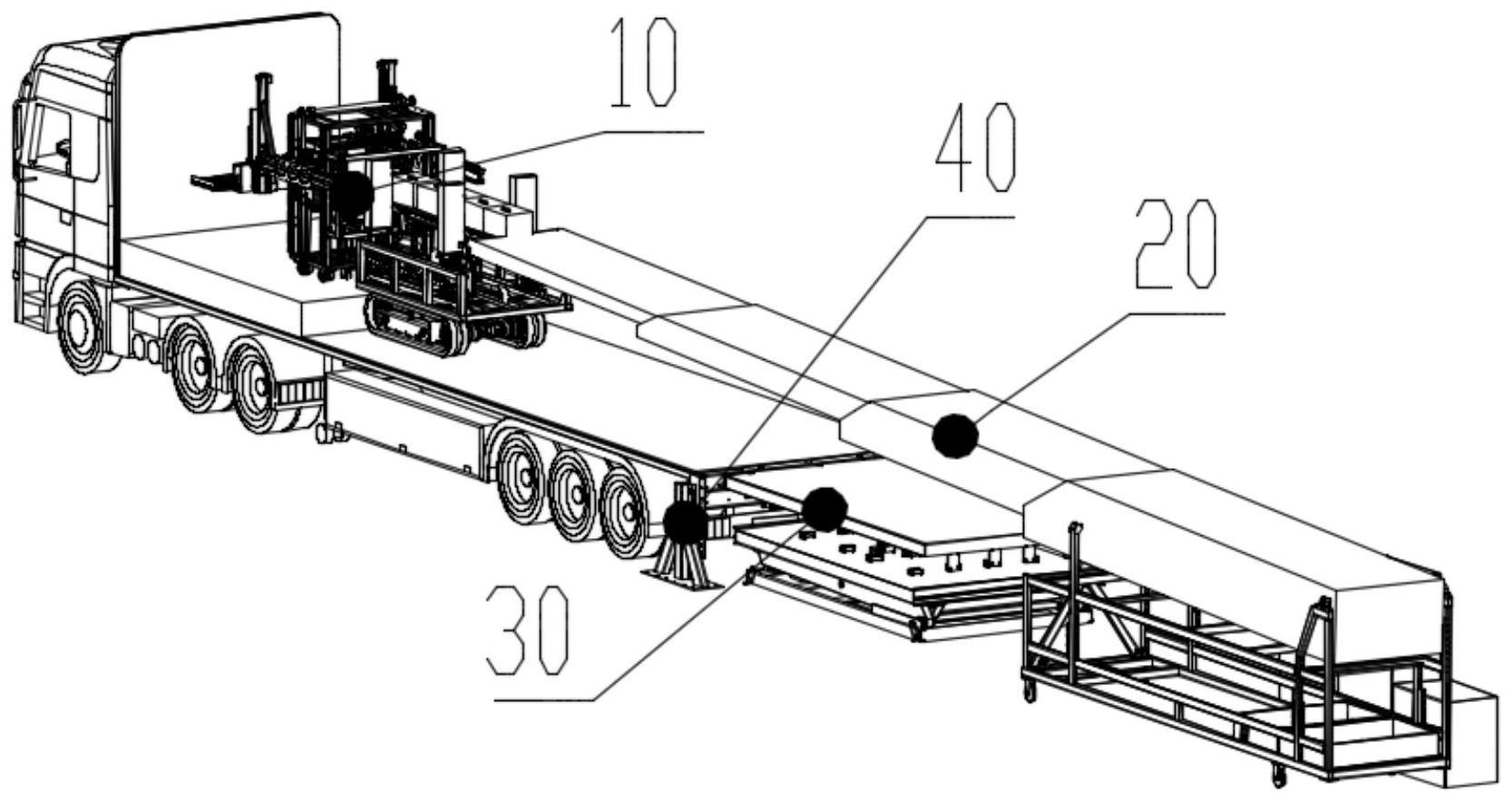
3、第一方面,本发明提供一种两段式装车机,能够上下车厢的鹅颈平台,包括:
4、前段装车机器人,所述前段装车机器人包括前段框架、顶升滚轮总成、码盘总成;
5、所述顶升滚轮总成与所述前段框架可升降连接,且所述顶升滚轮总成能够沿第一方向在车厢上移动;所述码盘总成可活动地设置在所述前段框架上以实现整理货物并码放货物;
6、以及后段装车机器人,后段装车机器人包括底盘和前伸臂总成,所述底盘能够沿第一方向在车厢的平板台上移动;所述前伸臂总成与所述底盘可活动连接,且所述前伸臂总成能够沿所述第一方向伸出所述底盘;
7、所述前伸臂总成与所述前段框架连接以使所述前段装车机器人能够在鹅颈平台和所述平板台上移动。
8、本方案的两段式装车机的前段装车机器人能够在顶升滚轮总成的作用下实现上升至车厢的鹅颈平台高度和下降至车厢的平板台的高度;而后段装车机器人的前伸臂总成能够推动前段装车机器人,使得前段装车机器人能够通过顶升滚轮总成在鹅颈平台或平板台上移动,从而实现了前段装车机器人上下鹅颈平台。设置在的前段装车机器人上的码盘总成能够实现整理货物并码放货物。如此实现了通过移动前段装车机器人至鹅颈平台的预设位置再进行货物码垛,相较于现有技术中的整个装车机仅能够在平板台上移动而导致大臂过长的情况,这样的两段式装车机能够显著的缩短大臂行程长度,减轻了对应的配重,且货物码垛效率更高。
9、在可选的实施方式中,沿所述前段装车机器人的高度方向,所述前伸臂总成与所述前段框架可活动配合。
10、在可选的实施方式中,所述底盘和所述前伸臂总成可升降配合。
11、在可选的实施方式中,所述码盘总成包括码盘框架、码盘外延机构和触边传感器;所述码盘框架与所述前段框架配合;
12、所述码盘外延机构分别设置在所述码盘框架的两侧,以靠近或远离所述车厢的宽度方向的外侧壁;
13、所述触边传感器设置在所述码盘外延机构的外侧壁上。
14、在可选的实施方式中,所述码盘总成还包括推出座机构、侧延伸机构、关门阻挡机构;所述码盘框架具有供货物通过的货物通道口;
15、沿车厢宽度方向,所述侧延伸机构和所述关门阻挡机构分别可活动地设置在所述推出座机构的两侧,以使所述侧延伸机构能够移动至码盘外延机构的外侧边和使所述关门阻挡机构能够封闭所述货物通道口;
16、所述推出座机构沿第一方向可活动地设置在所述码盘框架上。
17、在可选的实施方式中,所述码盘总成还包括动力滚筒;
18、所述动力滚筒设置在所述码盘框架靠近所述前段框架的位置,以驱动货物从所述前段框架处移动至所述码盘框架上。
19、在可选的实施方式中,所述前段装车机器人还包括内输送线,所述内输送线包括滚筒线、分拨机构和可调固定侧挡边;
20、所述滚筒线设置在所述前段框架上,所述滚筒线用于将货物输送至连所述码盘总成;
21、可调固定侧挡边设置在所述滚筒线的宽度方向两侧;所述分拨机构与所述滚筒线可活动配合,以在两个所述可调固定侧挡边之间移动而调整货物在滚筒线的宽度方向上的位置。
22、在可选的实施方式中,所述内输送线还包括抱夹机构和升降阻挡机构;
23、所述升降阻挡机构可升降地设置在所述滚筒线上以阻挡货物沿第一方向移动;所述抱夹机构沿车厢宽度方向移动以夹持所述货物移动至预设位置。
24、在可选的实施方式中,所述后段装车机器人还包括依次连接的累积输送线和差速输送线;
25、所述累积输送线用于接受货物,所述差速输送线设置在所述累积输送线靠近所述前段装车机器人的一端;
26、所述差速输送线的输送速度大于所述累积输送线的输送速度。
27、第二方面,本发明提供一种装车方法,应用于如前述实施方式中任意一项所述的两段式装车机;所述装车方法包括:
28、在车厢的平板台上时,前段装车机器人的顶升滚轮总成伸出,顶升所述前段框架高于所述鹅颈平台;
29、所述前伸臂总成前伸,以推动前段装车机器人向前运动至鹅颈平台上的装车位置;
30、所述前段装车机器人完成货物码垛装箱。
31、本发明实施例的有益效果包括,例如:
32、本方案的两段式装车机包括前段装车机器人和后段装车机器人。顶升滚轮总成能够将前段装车机器人提升至鹅颈平台高度和下降至车厢的平板台的高度;前伸臂总成与顶升滚轮总成配合以推动前段装车机器人在鹅颈平台或平板台上移动,从而实现了前段装车机器人上下鹅颈平台。能够推动前段装车机器人,使得前段装车机器人能够通过顶升滚轮总成在鹅颈平台或平板台上移动,从而实现了前段装车机器人上下鹅颈平台。如此改善了现有技术中的整个装车机仅能够在平板台上移动而使得大臂过长引起的过长大臂空间限制、需要更重的配重和码垛效率低下的问题。
技术特征:
1.一种两段式装车机,能够上下车厢的鹅颈平台,其特征在于,包括:
2.根据权利要求1所述的两段式装车机,其特征在于:
3.根据权利要求2所述的两段式装车机,其特征在于:
4.根据权利要求1所述的两段式装车机,其特征在于:
5.根据权利要求4所述的两段式装车机,其特征在于:
6.根据权利要求4所述的两段式装车机,其特征在于:
7.根据权利要求1所述的两段式装车机,其特征在于:
8.根据权利要求7所述的两段式装车机,其特征在于:
9.根据权利要求1所述的两段式装车机,其特征在于:
10.一种装车方法,其特征在于:
技术总结
本发明涉及装车技术领域,具体而言,涉及一种两段式装车机和装车方法。两段式装车机包括前段装车机器人,前段装车机器人包括前段框架、顶升滚轮总成、码盘总成;顶升滚轮总成与前段框架可升降连接,且顶升滚轮总成能够沿第一方向在车厢上移动;码盘总成可活动地设置在前段框架上以实现整理货物并码放货物;以及后段装车机器人,后段装车机器人包括底盘和前伸臂总成,底盘能够沿第一方向在车厢的平板台上移动;前伸臂总成与底盘可活动连接,且前伸臂总成能够沿第一方向伸出底盘。如此能够减小装车大臂的长度,从而改善现有技术因为大臂过长导致的空间性限制、需要平衡过大力矩和装车效率低下的问题。
技术研发人员:许大红,石江涛,贾仁耀,汪隽清,方明进,张瑞,吴祥,周文晓,邱强强,王炎欢,郭子文
受保护的技术使用者:合肥泰禾智能科技集团股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!