一种棍体自动打包机的制作方法
1.本实用新型涉及一种棍体自动打包机。
背景技术:
2.计数棒作为教学用具,用于辅助学生进行数数和计算学习。市面上销售的计数棒一般整盒销售或者将多根计数棒绑成一捆进行销售。以捆为单位的计数棒,在捆绑时,一般是将预定的数量的棍体放置在一起,并通过橡皮筋进行捆绑,其加工效率较低,劳动强度相对较大。
3.鉴于此,本案发明人对上述问题进行深入研究,遂有本案产生。
技术实现要素:
4.本实用新型的目的在于提供一种提高包装效率、降低劳动强度的棍体自动打包机。
5.为了达到上述目的,本实用新型采用这样的技术方案:
6.一种棍体自动打包机,包括棍体计数输送机构、棍体捆绑机构以及棍体整平出料机构,棍体计数输送机构的出料端设有中转机构,中转机构包括第一支架、设置在第一支架上的第一传送带、第二支架、设置在第二支架上的第二传送带以及用于驱动第一传送带和第二传送带转动的传送带驱动机构,在第一传送带上设有多个第一托槽,多个第一托槽沿第一传送带的长度方向等间距排布,在第二传送带上对应第一托槽设有多个第二托槽,多个第二托槽沿第二传送带的长度方向等间距排布,一个第一托槽和一个第二托槽共同形成用于放置一堆棍体的托料空间,所述棍体计数输送机构对应托料空间设置,所述棍体捆绑机构对应托料空间设置,所述棍体整平出料机构对应中转机构的出料端设置。
7.作为本实用新型的优选方式,所述棍体计数输送机构包括用于放置棍体并将棍体送出的振动料盘、用于将棍体逐一送出的理料机构以及用于将棍体逐一输送至预定位置的输送带机构,振动料盘的出料端对应理料机构的进料端设置,理料机构的出料端对应输送带机构的进料端设置,理料机构包括理料通道、设置在理料通道中的送料压轮以及用于驱动送料压轮转动以将一根棍体从理料通道中送出的压轮驱动机构,输送带机构包括料架、设置在料架上的输送带以及用于驱动输送带转动的料带驱动机构,输送带上设有多个用于限制棍体打滑的限位槽,限位槽沿输送带的宽度方向延伸,多个限位槽沿输送带的长度方向排布,输送带的出料端设有用于对从输送带送出的棍体进行计数的感应计数器,输送带的出料端对应所述托料空间设置。
8.作为本实用新型的优选方式,所述理料通道的进料端高于出料端,所述输送带的进料端高于出料端。
9.作为本实用新型的优选方式,所述棍体捆绑机构包括机架、用于堆放棍体的槽座、用于带动槽座上下移动的升降驱动机构、用于夹持棍体的两端的第一机械手组件和第二机械手组件、用于带动第一机械手组件和第二机械手转动的机械手转动驱动机构、用于供给
弹性薄膜的供料架以及用于引导薄膜走向的导向架,导向架中设有导向辊和与导向辊配合以夹持薄膜或松开薄膜的导向块,导向架上设有用于带动导向块靠近导向辊或远离导向辊的导向块驱动机构,导向架的上端可转动地设置在机架上,导向辊和导向块设置在导向架的下端,在机架上设有用于带动导向架摆动的导向架驱动机构,在导向架上还设有用于吸附薄膜的自由端的吸盘组件,在机架上设有用于将薄膜的自由端吹向吸盘组件的吹气组件,导向辊和导向块均设置在吸盘组件与吹气组件之间,在所述机架上还设有用于将薄膜切断的切刀和用于带动切刀动作的切刀驱动机构,第一机械手组件或第二机械手组件上设有用于将薄膜压抵在棍体上的压针。
10.作为本实用新型的优选方式,所述第一机械手组件包括第一安装架、第一夹持块、第二夹持块以及第三夹持块,第一夹持块、第二夹持块以及第三夹持块均匀布设在第一安装架上并围成用于夹持棍体的第一夹持空间,第一夹持块通过第一连杆铰接在第一安装架上,第二夹持块通过第二连杆铰接在第一安装架,在第一安装架上设有用于带动第一连杆摆动以实现第一夹持块夹持或松开的第一驱动机构,在第一安装架上设有用于带动第二连杆摆动以实现第二夹持块夹持或松开的第二驱动机构,所述第二机械手组件包括第二安装架、第四夹持块、第五夹持块以及第六夹持块,第四夹持块、第五夹持块以及第六夹持块均匀布设在第二安装架上并围成用于夹持棍体的第二夹持空间,第四夹持块通过第三连杆铰接在第二安装架上,第五夹持块通过第四连杆铰接在第二安装架,在第二安装架上设有用于带动第三连杆摆动以实现第四夹持块夹持或松开的第三驱动机构,在第二安装架上设有用于带动第四连杆摆动以实现第五夹持块夹持或松开的第四驱动机构,所述压针设置在第六夹持块上。
11.作为本实用新型的优选方式,所述第六夹持块上设有用于带动所述压针在所述第一机械手组件与所述第二机械手组件方向伸缩的压针驱动机构。
12.作为本实用新型的优选方式,所述导向块通过沿水平设置的销轴可转动地安装在所述导向架上,所述导向块驱动机构为电机,电机的输出轴与销轴传动连接。
13.作为本实用新型的优选方式,所述供料架上设有放料轴和设置在放料轴上的卷筒,所述薄膜绕卷在卷筒上。
14.作为本实用新型的优选方式,所述棍体整平出料机构包括支架、可转动地设置在支架上的接料转盘以及用于驱动接料转盘转动的转盘驱动机构,接料转盘沿轴向的两端设有用于承接棍体的第一接料爪和第二接料爪,第一接料爪对应第二接料爪设置,第一接料爪为多个,多个第一接料爪沿接料转盘的周向排布,多个第二接料爪沿接料转盘的周向排布,还包括对应第一接料爪与第二接料爪之间的位置设置的压板和用于驱动压板沿接料转盘的径向方向移动的压板驱动机构,还包括对应第一接料爪和第二接料爪设置的第一夹板、第二夹板以及驱动第一夹板和第二夹板相对运动或相背运动的夹板驱动机构,所述第一接料爪和所述第二接料爪均设置在第一夹板和第二夹板之间。
15.作为本实用新型的优选方式,所述夹板驱动机构为手指气缸,手指气缸的缸体安装在所述支架上,所述第一夹板和所述第二夹板分别安装在手指气缸的两个伸缩端,所述压板驱动机构为气缸,气缸的缸体固定在所述支架上,气缸的活塞杆沿竖直方向设置,所述气缸的活塞杆上设有固定板,所述压板安装在固定板上,所述手指气缸的缸体固定在固定板上。
16.采用本实用新型的技术方案后,通过棍体计数输送机构将预定数量的棍体输送至托料空间中,通过捆绑机构进行捆绑打包,通过棍体整平出料机构进行整平理料,从而实现预定数量的棍体的自动打包,本实用新型能够提高生产效率,降低劳动强度。
附图说明
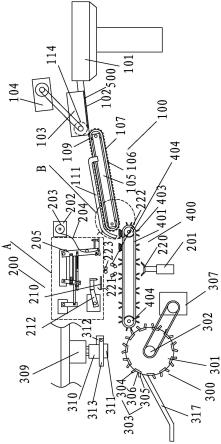
17.图1为本实用新型的结构示意图。
18.图2为图1中a处的放大图。
19.图3为图1中b处的放大图。
20.图4为本实用新型中的中转机构的俯视结构示意图。
21.图5为本实用新型中第一机械手组件的俯视结构示意图。
22.图6为本实用新型中第二机械手组件的俯视结构示意图。
23.图7为本实用新型中棍体整平出料机构的俯视结构示意图。
24.图中:
25.棍体计数输送机构100振动料盘101
26.滑板102第一挡板103
27.压轮驱动机构104料架105
28.输送带106限位条107
29.限位槽108主动辊109
30.从动辊110导料板111
31.导料空间112感应计数器113
32.送料压轮114
33.棍体捆绑机构200升降驱动机构201
34.供料架202卷筒203
35.薄膜204导向架205
36.导向辊206导向块207
37.导向块驱动机构208吸盘组件209
38.吹气组件210切刀驱动机构211
39.切刀212联动杆213
40.限位块214限位杆215
41.限位螺母216导向架驱动机构217
42.驱动块218驱动杆219
43.槽座220第一夹持块221
44.第二夹持块222第三夹持块223
45.第一连杆224第二连杆225
46.第三连杆226第一驱动机构227
47.第二驱动机构228第一安装架229
48.第四夹持块230第五夹持块231
49.第六夹持块232第四连杆234
50.第三驱动机构236第四驱动机构237
51.压针238压针驱动机构239
52.水平轴240鱼眼轴承241
53.驱动轴242第五连杆243
54.第六连杆244第二安装架245
55.销轴246
56.棍体整平出料机构300接料转盘301
57.支撑轴302第一接料爪303
58.第一支板304第二支板305
59.托板306转盘驱动机构307
60.第二接料爪308压板驱动机构309
61.固定板310压板311
62.手指气缸312第一夹板313
63.第二夹板314溜料板315
64.第一护板316第二护板317
65.第一开槽318第二开槽319
66.中转机构400第一传送带401
67.第二传送带402第一托槽403
68.第二托槽404第一支架405
69.第二支架406
70.棍体500
具体实施方式
71.为了进一步解释本实用新型的技术方案,下面结合实施例进行详细阐述。
72.参照图1至图7,一种棍体自动打包机,包括棍体计数输送机构100、棍体捆绑机构200以及棍体整平出料机构300,为了更好地实现各机构和元件进行有序配合,本实用新型还包括控制器,其为电控领域中的常规结构,本实用新型在此不再进行详细描述。棍体计数输送机构100的出料端设有中转机构400,中转机构400包括第一支架405、设置在第一支架405上的第一传送带401、第二支架406、设置在第二支架406上的第二传送带402以及用于驱动第一传送带401和第二传送带402转动的传送带驱动机构,第一传送带401和第二传送带402均为环状,采用链条结构或输送带结构,传送带驱动机构采用常规的链轮和电机,第一传送带401套设在一组链轮上,第二传送带402套设在另一组链轮上,为了更好地实现第一传送带401和第二传送带402的同步转动,第一传送带401的链轮和第二传送带402的链轮通过同步轴连接。在第一传送带401上设有多个第一托槽403,多个第一托槽403沿第一传送带401的长度方向等间距排布,在第二传送带402上对应第一托槽403设有多个第二托槽404,多个第二托槽404沿第二传送带402的长度方向等间距排布,一个第一托槽403和一个第二托槽404共同形成用于放置一堆棍体500的托料空间,在放料时,棍体500的两端分别架设在第一托槽403和第二托槽404上,棍体500的中间位置悬空。
73.本实用新型中,所述棍体计数输送机构100对应托料空间设置,所述棍体捆绑机构200对应托料空间设置,所述棍体整平出料机构300对应中转机构400的出料端设置。
74.本实用新型还提出一种棍体计数输送机构100,包括用于放置棍体500并将棍体500送出的振动料盘101、用于将棍体500逐一送出的理料机构以及用于将棍体500逐一输送至预定位置(即输送至中转机构400)的输送带机构,本实用新型中振动料盘101为机械领域中的常规结构,其根据棍体的长度和直径进行相应的设计,设定无序堆放的棍体能够逐一输送,振动料盘101的出料端对应理料机构的进料端设置,理料机构的出料端对应输送带机构的进料端设置。理料机构包括理料通道、设置在理料通道中的送料压轮114以及用于驱动送料压轮114转动以将一根棍体500从理料通道中送出的压轮驱动机构104。输送带机构包括料架105、设置在料架105上的输送带106以及用于驱动输送带106转动的料带驱动机构(图中未示出),输送带106上设有多个用于限制棍体500打滑的限位槽108,限位槽108沿输送带106的宽度方向延伸,多个限位槽108沿输送带106的长度方向排布,输送带106的出料端设有用于对从输送带106送出的棍体500进行计数的感应计数器113,当棍体500从感应计数器113的感应范围经过时,实现计数。
75.作为本实用新型的优选方式,所述理料通道的进料端高于出料端,棍体500在重力下能够向下滑落,所述输送带106的进料端高于出料端。
76.作为本实用新型的优选方式,所述输送带106上设有多个限位条107,限位条107沿所述输送带106的宽度方向延伸,多个限位条107沿输送带106的长度方向排布,相邻限位条107之间形成所述限位槽108。
77.作为本实用新型的优选方式,所述理料通道包括滑板102、设置在滑板102上的第一挡板103和第二挡板(图中未示出),滑板102与第一挡板103和第二挡板均垂直设置,三者围成槽型通道,第一挡板103与第二挡板之间的距离与棍体500的长度对应,使得棍体500能够在垂直于长度方向进行输送。
78.作为本实用新型的优选方式,所述送料压轮114通过转轴可转动地设置在所述第一挡板103和所述第二挡板上,转轴沿水平方向设置,所述压轮驱动机构104为电机,电机与转轴传动连接。
79.作为本实用新型的优选方式,所述料架105包括第一支撑板和第二支撑板,第一支撑板和第二支撑板安装在机架上,第一支撑板与第二支撑板之间设有主动辊109和从动辊110,所述输送带106套设在主动辊109和从动辊110上,所述料带驱动机构为电机,电机与主动辊109传动连接。
80.作为本实用新型的优选方式,还包括导料板111,导料板111设置在所述输送带106的上方,导料板111与所述输送带106的出料端之间形成用于引导棍体500掉落的导料空间112,所述感应计数器113安装在导料板111上,导料板111安装在第一支撑板或第二支撑板上。
81.本实用新型的输送带106的出料端对应所述托料空间设置,用于将棍体500送入托料空间。
82.本实用新型还提出一种棍体捆绑机构200,包括机架、用于堆放棍体500的槽座220、用于带动槽座220上下移动的升降驱动机构201、用于夹持棍体500的两端的第一机械手组件和第二机械手组件、用于带动第一机械手组件和第二机械手转动的机械手转动驱动机构、用于供给弹性薄膜204的供料架202以及用于引导薄膜204走向的导向架205,本实用新型中弹性薄膜204优选透明薄膜204,例如pe薄膜204。导向架205中设有导向辊206和与导
向辊206配合以夹持薄膜204或松开薄膜204的导向块207,导向架205上设有用于带动导向块207靠近导向辊206或远离导向辊206的导向块驱动机构208,导向架205的上端可转动地设置在机架上,导向辊206和导向块207设置在导向架205的下端,在机架上设有用于带动导向架205摆动的导向架驱动机构217。在导向架205上还设有用于吸附薄膜204的自由端的吸盘组件209,吸盘组件209为常规的负压吸盘组件209,其包括吸盘和负压装置,当薄膜204的自由端靠近吸盘时,能够将薄膜204吸附在吸盘上。在机架上设有用于将薄膜204的自由端吹向吸盘组件209的吹气组件210,吹气组件210为常规的高压空气装置,用于提供高压气流,将薄膜204的自由端吹向吹气组件210。导向辊206和导向块207均设置在吸盘组件209与吹气组件210之间,在所述机架上还设有用于将薄膜204切断的切刀212和用于带动切刀212动作的切刀212驱动机构211,第一机械手组件或第二机械手组件上设有用于将薄膜204压抵在棍体500上的压针238。压针238用于将薄膜204的自由端先压靠在棍体500上,避免薄膜204在打卷时打滑。
83.作为本实用新型的优选方式,所述槽座220包括第一u形板、第二u形板以及连接第一u形板和第二u形板的连接板,连接板沿水平方向设置,所述升降驱动机构201连接在连接板上。
84.本实用新型中槽座220对应第一托槽403和第二托槽404之间的位置设置,第一u形板与第二u形板之间的间距小于第一托槽403与第二托槽404之间的间距。
85.作为本实用新型的优选方式,所述第一机械手组件包括第一安装架229、第一夹持块221、第二夹持块222以及第三夹持块223,第一夹持块221、第二夹持块222以及第三夹持块223均匀布设在第一安装架229上并围成用于夹持棍体500的第一夹持空间,第一夹持块221通过第一连杆224铰接在第一安装架229上,第二夹持块222通过第二连杆225铰接在第一安装架229,在第一安装架229上设有用于带动第一连杆224摆动以实现第一夹持块221夹持或松开的第一驱动机构227,在第一安装架229上设有用于带动第二连杆225摆动以实现第二夹持块222夹持或松开的第二驱动机构228。通过第一驱动机构227和第二驱动机构228带动第一夹持块221和第二夹持块222相互靠近或分离,本实用新型中第三夹持块223位于第一夹持块221和第二夹持块222的侧上方,第三夹持块223通过第五连杆243安装在第一安装架229上。
86.作为本实用新型的优选方式,所述第二机械手组件包括第二安装架245、第四夹持块230、第五夹持块231以及第六夹持块232,第四夹持块230、第五夹持块231以及第六夹持块232均匀布设在第二安装架245上并围成用于夹持棍体500的第二夹持空间,第四夹持块230通过第三连杆226铰接在第二安装架245上,第五夹持块231通过第四连杆234铰接在第二安装架245,在第二安装架245上设有用于带动第三连杆226摆动以实现第四夹持块230夹持或松开的第三驱动机构236,在第二安装架245上设有用于带动第四连杆234摆动以实现第五夹持块231夹持或松开的第四驱动机构237,所述压针238设置在第六夹持块232上。通过第驱动机构236和第四驱动机构237带动第四夹持块230和第五夹持块231相互靠近或分离,第六夹持块232位于第四夹持块230和第五夹持块231的侧上方,第六夹持块232通过第六连杆244安装在第二安装架245上。
87.作为本实用新型的优选方式,所述第六夹持块232上设有用于带动所述压针238在所述第一机械手组件与所述第二机械手组件方向伸缩的压针驱动机构239,压针驱动机构
239例如可以采用气缸,带动压针238伸缩,在压针238伸出时,可以将薄膜204压抵在棍体500上,压针238缩回时,可以从薄膜204中脱离,这种结构能够保证薄膜204的完整性,并且使得薄膜204在绕卷之初不会打滑,而薄膜204绕卷一圈之后,利用薄膜204之间的摩擦力,则薄膜204不会再打滑,此时可以将压针238缩回。压针238以破坏部分薄膜的方式移出,理论上也可以,但不是最佳方式。
88.作为本实用新型的优选方式,所述机械手转动驱动机构为第一电机和第二电机,所述第一安装架229设置在第一电机的输出轴上,所述第二安装架245设置在第二电机的输出轴上,所述第一驱动机构227、所述第二驱动机构228、所述第三驱动机构236以及所述第四驱动机构237均为气缸。
89.作为本实用新型的优选方式,所述导向块207通过沿水平设置的销轴246可转动地安装在所述导向架205上,销轴246沿水平方向设置,所述导向块驱动机构208为电机,电机的输出轴与销轴传动连接,当导向块207抵压在导向辊206上,可以将薄膜204夹持住,避免薄膜204打滑。
90.作为本实用新型的优选方式,所述导向架驱动机构217包括电机、驱动轴242、安装在驱动轴242上的驱动块218以及铰接在驱动块218上的驱动杆219,驱动杆219的一端连接在驱动块218上,驱动轴242沿水平方向设置,驱动杆219的另一端铰接在所述导向架205上,具体是连接在导向架205的中上部,电机的输出轴与驱动轴242传动连接。
91.作为本实用新型的优选方式,还包括设置在所述机架上的水平轴240,水平轴240上设有联动杆213,所述导向架205的上端铰接在联动杆213上,水平轴240与导向架205分设在联动杆213的两端,水平轴240上还铰接有限位块214,限位块214的下端设有鱼眼轴承241,鱼眼轴承241中穿设有限位杆215,限位杆215的一端铰接在所述导向架205上,另一端穿过鱼眼轴承241并设有限位螺母216,限位杆215可以沿着鱼眼轴承241的轴向移动,联动杆213、限位块214、限位杆215以及导向架205围成四边形,通过这种结构,使得导向架205能够在预定的范围内稳定摆动。
92.作为本实用新型的优选方式,所述供料架202上设有放料轴和设置在放料轴上的卷筒203,卷筒203沿水平方向设置,所述薄膜204绕卷在卷筒203上。本实用新型可以通过导向块207和导向辊206夹持薄膜204以拉动薄膜204,可以通过设置电机,带动薄膜204自动释放,减轻薄膜204拉动的阻力。
93.本实用新型还提出一种棍体整平出料机构300,包括支架、可转动地设置在支架上的接料转盘301以及用于驱动接料转盘301转动的转盘驱动机构307,接料转盘301的轴线沿水平方向设置,接料转盘301沿轴向的两端设有用于承接棍体500的第一接料爪303和第二接料爪308,第一接料爪303对应第二接料爪308设置,第一接料爪303为多个,多个第一接料爪303沿接料转盘301的周向排布,多个第二接料爪308沿接料转盘301的周向排布,还包括对应第一接料爪303与第二接料爪308之间的位置设置的压板311和用于驱动压板311沿接料转盘301的径向方向移动的压板驱动机构309,压板311设置在接料转盘301的上方。本实用新型还包括对应第一接料爪303和第二接料爪308设置的第一夹板313、第二夹板314以及驱动第一夹板313和第二夹板314相对运动或相背运动的夹板驱动机构,所述第一接料爪303和所述第二接料爪308均设置在第一夹板313和第二夹板314之间,第一夹板313和第二夹板314平行设置且沿水平方向设置。
94.作为本实用新型的优选方式,所述接料转盘301通过支撑轴302安装在所述支架上,支撑轴302沿水平方向设置,所述转盘驱动机构307与支撑轴302传动连接。
95.作为本实用新型的优选方式,所述转盘驱动机构307为电机。
96.作为本实用新型的优选方式,所述夹板驱动机构为手指气缸312,手指气缸312的缸体安装在所述支架上,所述第一夹板313和所述第二夹板314分别安装在手指气缸312的两个伸缩端。
97.作为本实用新型的优选方式,所述第一接料爪303和所述第二接料爪308均包括第一支板304、第二支板305以及连接在第一支板304与第二支板305之间的托板306,第一支板304、第二支板305以及托板306围成v形。
98.作为本实用新型的优选方式,所述压板驱动机构309为气缸,气缸的缸体固定在所述支架上,气缸的活塞杆沿竖直方向设置,所述压板311安装在气缸的活塞杆上。
99.作为本实用新型的优选方式,所述气缸的活塞杆上设有固定板310,所述压板311安装在固定板310上,所述手指气缸312的缸体固定在固定板310上。
100.作为本实用新型的优选方式,所述支架上还设有倾斜设置的料斗,料斗包括溜料板315、设置在溜料板315上的第一护板316和第二护板317,溜料板315相对水平面倾斜设置,溜料板315安装在所述支架上,溜料板315上设有避让第一接料爪303的第一开槽318和避让第二接料爪308的第二开槽319,第一开槽318和第二开槽319沿溜料板315的长度方向延伸。
101.本实用新型在工作时:
102.棍体500通过振动料盘101逐一输送至理料机构,通过压轮驱动机构104带动送料压轮114转动,从而逐一将棍体逐一输送至输送带106的限位槽108,通过输送带106将棍体500逐一送出,棍体500经过感应计数器113进行计数,棍体500从输送带106送出后落在中转机构400的第一托槽403和第二托槽404上,第一托槽403和第二托槽404承接预定数量的棍体后,并随着第一传送带401和第二传送带402输送至升降驱动机构201的下方。
103.升降驱动机构201带动槽座220上升,通过槽座220将第一托槽403和第二托槽404的棍体500向上举升至第一机械手组件和第二机械手组件位置,导向架205在导向架驱动机构217的作用下带动薄膜204移动至棍体500处(在移动过程中,导向块207与导向辊206夹持住薄膜204),在导向架205移动之前,薄膜204从供料架202上拉出并从导向块207与导向辊206之间穿过,薄膜204的自由端被吸盘组件209吸附。第一机械手组件和第二机械手组件夹持棍体500,压针238压住薄膜204,机械手旋转驱动机构带动第一机械手组件和第二机械手组件转动,从而将薄膜204包覆在棍体500上,第一机械手组件和第二机械手组件停止转动,之后通过切刀驱动机构211带动切刀212运动,将薄膜204切断使薄膜204形成自由端,导向块207和导向辊206夹持住薄膜204,导向架205在导向架驱动机构217作用下回位,吹气组件210动作,将薄膜204的自由端吹向吸盘组件209,吸盘组件209将薄膜204的自由端吸附住并呈展平状态。第一机械手组件和第二机械手组件松开捆绑好的棍体500,升降驱动机构201带动捆绑好的棍体下降,并使得棍体转移至第一托槽403和第二托槽404中,之后通过升降驱动机构201将下一组第一托槽403和第二托槽404中未捆绑的棍体举升,进行下一次捆棍体的捆绑。
104.通过中转机构400,将捆绑好的棍体输送至第一接料爪303和第二接料爪308,随着
接料转盘301转动,转动至压板311下方,通过压板驱动机构309带动压板311运动并在周向压挤棍体,从而整捆棍体理平,通过夹板驱动机构带动第一夹板313和第二夹板314在轴向挤压棍体,将各棍体码整齐。接料转盘301转动,将整理平齐的棍体转移至料斗中,滑动至预定位置(例如料篮)。
105.本实用新型中机架和支架作为零部件安装在载体,其形状根据使用长度进行相应的设置。
106.本实用新型的产品形式并非限于本案实施例,任何人对其进行类似思路的适当变化或修饰,皆应视为不脱离本实用新型的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1