一种袋装抓取投料夹具的制作方法
1.本实用新型涉及夹具技术领域,具体涉及一种袋装抓取投料夹具。
背景技术:
2.随着目前各行业的快速发展,特别是一些重工行业,生产任务加大,工人劳动强度增加,容易疲乏出现安全事故,故需要增加智能设备来解决,减轻劳动力和走运,提高安全性和生产效率等。
3.现有技术中,麻袋,胶袋,编织袋包装的原材料投料工序作为生产的重要一环,长期以来一直未能实现自动化生产,人工破袋投料方式劳动强度大、生产效率低,且落料时产生的大量粉尘对工人的健康影响很大。例如饲料生产工序中,采用现有技术的人工破袋投料方式当然可以使用,但基本是靠人工完成、效率低,使用效果还不够理想。
技术实现要素:
4.本实用新型的目的在于公开了一种袋装抓取投料夹具,解决了现有袋装原材料人工上料劳动强度大,影响健康,生产效率低的问题。
5.为达到上述目的,本实用新型采用如下技术方案:
6.一种袋装抓取投料夹具,包括顶板、连接顶板的第一气缸和设有钩爪的活动层结构;第一气缸驱动活动层结构相对于顶板抖动并带动钩爪抖动;活动层结构包括连接第一气缸的底板和设于底板上的第一钩爪组件和第二钩爪组件,第一钩爪组件的钩爪和第二钩爪组件的钩爪相互配合实现抓取袋装原材料。
7.进一步,所述第一气缸通过气缸固定板连接所述底板,第一气缸的拉臂通过第一接头和t字座铰接所述顶板。
8.进一步,所述第一钩爪组件和所述第二钩爪组件结构相同且对称设置;第一钩爪组件包括固定在所述底板上的第二气缸、旋转轴和套设于旋转轴上的至少1个钩爪;
9.第二气缸的拉臂通过第二接头和连接杆连接旋转轴的端部;
10.连接杆第一端和第二接头铆接,连接杆第二端设有连接杆轴套,连接杆轴套套设于旋转轴的端部实现连接杆和旋转轴固接。
11.进一步,所述旋转轴的两端分别通过深沟球轴承和固定座连接所述底板,深沟球轴承设于固定座和旋转轴之间,实现旋转轴相对于固定座旋转。
12.进一步,所述旋转轴沿着所述底板的长度方向设置且设于底板的边缘位置。
13.进一步,所述钩爪包括套设在所述旋转轴上的固定套、连接固定套的第一弯曲部、连接第一弯曲部的第二弯曲部和连接第二弯曲部的爪尖。
14.进一步,所述第一弯曲部的弧度b满足130
°
≤b≤160
°
;所述第二弯曲部的弧度c满足25
°
≤c≤40
°
。
15.进一步,所述第一气缸和所述第二气缸是紧凑型气缸。
16.进一步,所述第二气缸的拉臂和所述底板之间的夹角a满足10
°
≤a≤25
°
。
17.与现有技术相比,本实用新型的有益效果:
18.1、本实用新型适用于麻袋,胶袋,编织袋等包装的产品。本实用新型采用第二气缸驱动钩爪旋转,实现钩取袋装原料,然后第一气缸反复伸缩驱动钩爪抖动,实现破袋落料,且使物料流失干净。本实用新型采用以上结构,实现自动化上料,自动完成料包输送、破袋投料、托盘码垛、缓存等功能,能很好地替代人工完成破袋投料工作。本实用新型和其它自动生产设备配合实现智能化生产线,适用于各种恶劣环境,如粉尘车间,防止粉尘对人体造成伤害。
19.2、钩爪采用第一弯曲部和第二弯曲部的结构,利于爪尖抓取袋体和避免应力过于集中,增强钩爪的整体强度。
附图说明
20.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
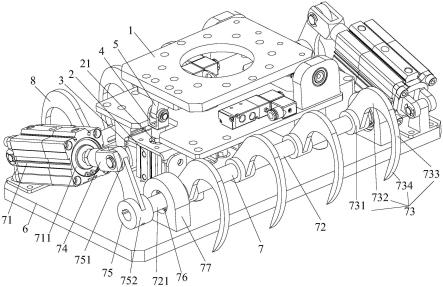
21.图1是本实用新型一种袋装抓取投料夹具,实施例一的立体示意图;
22.图2是图1的正视示意图;
23.图3是图2的俯视示意图;
24.图4是图2的右视示意图,此时第二气缸的拉臂回缩;
25.图5是图2的左视示意图,此时第二气缸的拉臂伸出;
26.图中,1、顶板;2、第一气缸;21、第一气缸的拉臂;3、气缸固定板;4、第一接头;5、t字座;6、底板;7、第一钩爪组件;71、第二气缸;711、第二气缸的拉臂;72、旋转轴;721、旋转轴的端部;73、钩爪;731、固定套;732、第一弯曲部;733、第二弯曲部;734、爪尖;74、第二接头;75、连接杆;751、连接杆第一端;752、连接杆轴套;76、深沟球轴承;77、固定座;8、第二钩爪组件。
具体实施方式
27.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
28.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅
表示第一特征水平高度小于第二特征。术语“垂直的”、“水平的”、“左”、“右”、“上”、“下”以及类似的表述只是为了说明的目的,而不是指示或暗示所指装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
30.实施例一
31.如图1-5实施例一所示一种袋装抓取投料夹具,包括用于固定的顶板1、连接顶板1的第一气缸2和设有钩爪的活动层结构。第一气缸2通过气缸固定板3连接活动层结构,第一气缸的拉臂21通过第一接头4(例如y接头)和t字座5铰接顶板1,第一气缸2驱动活动层结构相对于顶板1抖动并带动钩爪抖动。
32.活动层结构包括连接第一气缸1的底板6和设于底板6上的第一钩爪组件7和第二钩爪组件8,第一钩爪组件7和第二钩爪组件8结构相同且对称设置。第一钩爪组件7包括固定在底板上的第二气缸71、旋转轴72和套设于旋转轴72上的4个钩爪73,第一钩爪组件7的钩爪和第二钩爪组件8的钩爪相互配合实现抓取袋装原材料。第一气缸2和第二气缸71是紧凑型气缸。
33.第二气缸的拉臂711和底板6之间的夹角a满足10
°
≤a≤25
°
。实施例一中a优选15~18
°
。第二气缸的拉臂711通过第二接头74(例如y接头)和连接杆75连接旋转轴的端部721。连接杆第一端751和第二接头74铆接,连接杆第二端设有连接杆轴套752,连接杆轴套752套设于旋转轴的端部721实现连接杆75和旋转轴72固接。旋转轴72的两端分别通过深沟球轴承76和固定座77连接底板6,深沟球轴承76设于固定座77和旋转轴72之间,实现旋转轴72相对于固定座77旋转。旋转轴72沿着底板的长度方向x向设置且设于底板6的边缘位置。沿着旋转轴72的长度方向x向,4个钩爪73依次套设在旋转轴72上。钩爪73的爪尖734朝外设置。
34.实施例一中的钩爪73采用优质碳钢加工而成。钩爪73包括套设在旋转轴72上的固定套731、连接固定套731的第一弯曲部732、连接第一弯曲部732的第二弯曲部733和连接第二弯曲部733的爪尖734。第一弯曲部732的弧度b满足130
°
≤b≤160
°
,b优选145~150
°
第二弯曲部733的弧度c满足25
°
≤c≤40
°
,c优选30
°
~35
°
。钩爪73采用以上结构,利于爪尖734抓取袋体和避免应力过于集中,增强钩爪的整体强度。
35.作为对实施例一的进一步说明,现说明其动作流程:第二气缸的拉臂711伸缩并驱动钩爪73旋转,实现钩取袋装原料,然后第一气缸的拉臂21反复伸缩驱动钩爪73抖动,实现破袋落料,且使物料流失干净。实施例一投入生产后,实现自动化投料,和其它生产设备配合实现智能化生产线,实施例一适用于各种恶劣环境,如粉尘车间,防止粉尘对人体造成伤害。
36.实施例一的其它结构参见现有技术。
37.实施例二
38.作为对实施例一的进一步改进,实施例二一种袋装抓取投料夹具,还包括连接旋转轴72的电磁式位置传感器、看门狗芯片和mcu模块。第一气缸2、第二气缸71和电磁式位置传感器分别电连接mcu模块。电磁式位置传感器通过将旋转轴的转动圈数和/或角度传输给
mcu模块,实现识别钩爪73的位置,能够掌控清楚实施例二的工作状态。看门狗芯片连接mcu模块,使用看门狗芯片的目的是实时监控mcu模块运行状态,使其在无人状态下实现连续工作。
39.实施例二的其它结构参见实施例一。
40.需要说明的是,在本实用新型各个实施例中的各功能单元/模块可以集成在一个处理单元/模块中,也可以是各个单元/模块单独物理存在,也可以是两个或两个以上单元/模块集成在一个单元/模块中。上述集成的单元/模块既可以采用硬件的形式实现,也可以采用软件功能单元/模块的形式实现。
41.本实用新型并不局限于上述实施方式,如果对本实用新型的各种改动或变型不脱离本实用新型的精神和范围,倘若这些改动和变型属于本实用新型的权利要求和等同技术范围之内,则本实用新型也意图包含这些改动和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1