复式角度调整机构的制作方法
1.本实用新型涉及物流分拣设备技术领域,尤其涉及一种复式角度调整机构。
背景技术:
2.伸缩皮带输送机是在普通的输送机上增加了伸缩机构,以使得输送机在长度方向上能自由伸缩,随时控制输送机的长度。伸缩皮带输送机可进行双向运输物料,可与其他输送设备和物料分拣系统配合使用,以实现物料出入库或车辆装卸的自动化生产,在各行业中均得到了广泛的应用。在伸缩皮带输送机装卸货时,需将输送机倾斜一定角度以便于装卸货,但现有的角度调整机构角度调整较为繁琐,效率较低。
技术实现要素:
3.为克服上述缺点,本实用新型的目的在于提供一种复式角度调整机构,通过机械配合实现了输送机倾斜角度的快速调节。
4.为了达到以上目的,本实用新型采用的技术方案是:一种复式角度调整机构,设置在输送机的下方,用以调节输送机的倾斜角度。包括沿输送机长度方向布设的两组升降机构,每组升降机构均包括能升降移动的至少一个升降推杆,每个升降推杆的上端部均与输送机铰接;两组升降机构之间通过连杆机构实现同步运行,且两组升降机构的升降推杆的运动方向相反。
5.本实用新型的有益效果在于:
6.1、在升降机构中,通过升降推杆的升降移动能对输送机与升降推杆铰接的部位施加向上或向下的力,而通过两组升降机构的升降推杆的反向运动则使得一组升降机构对输送机施加向上的力的同时,另一组升降机构能对输送机施加向下的力,以实现对输送机倾斜角度的快速调整;
7.2、通过连杆机构的设置能将一组升降机构的驱动力传递给另一组升降机构,既保证了两组升降机构运行的同步性,又能降低动力能耗;
8.3、通过两组升降机构与输送机的铰接,能实现对输送机的不同部位的支撑,提高对输送机倾斜过程中的稳定支撑。
9.进一步来说,升降机构还包括与升降推杆一一对应设置的丝杆升降机,且每组升降机构的所有丝杆升降机通过传动组件连接以实现同步同向运行。通过丝杆升降机带动升降推杆升降移动,通过传动组件实现了同组升降机构的所有丝杆升降机的同步同向运行,进而实现同组升降机构的升降推杆的同步同向升降。
10.进一步来说,传动组件包括驱动轮、传动轮、张紧轮,驱动轮安装在机架上,其上同轴连接有手轮;传动轮与丝杆升降机一一对应设置,并与对应的丝杆升降机连接;张紧轮安装在机架上;驱动轮、传动轮、张紧轮上共同绕设有呈闭环的同步带或同步链条。通过手轮的设置便于人工施力以使驱动轮转动,进而通过同步带或同步链条带动传动轮、张紧轮转动,进而实现丝杆升降机的运行;通过张紧轮的设置能对同步带或同步链条的松紧进行调
节。
11.进一步来说,两组升降机构的驱动轮分别安装在机架的两侧,且安装高度不同,以使对应的两个手轮的高度位置不同。在两组升降机构上均设置手轮,便于人工在不同位置处操控,此外,在实际应用时,操作人员通常在地面或在车厢内进行货物分拣,而将两个手轮分别设置在不同的高度位置上,能便于在地面或车厢工作的操作人员进行输送机的角度调节,进一步提高角度调节的操作灵活度。
12.进一步来说,丝杆升降机包括固定壳体,固定壳体内设有能啮合传动的蜗轮、蜗杆,蜗杆的一端连接有传动轮;蜗轮的轴心处螺纹连接有升降推杆。当蜗杆转动时,蜗轮能同步转动,进而使与蜗轮螺纹连接的升降推杆进行升降移动。
13.进一步来说,两组升降机构的蜗杆分别位于蜗轮的不同侧,以使两组升降机构的蜗杆同向转动时,两组升降机构的蜗轮能反向转动。以实现两组升降机构的升降推杆能反向移动。
14.进一步来说,连杆机构包括传动轴杆,传动轴杆的两端分别与两组升降机构的一个丝杆升降机的蜗杆连接。通过传动轴杆的设置实现了两组升降机构的蜗杆的同向转动。
15.进一步来说,传动轴杆包括方轴、轴管,轴管套装在方轴上并能沿方轴轴向伸缩。通过方轴、轴管的配合实现了传动轴杆的轴向伸缩(即传动轴杆长度可变),以便于传动轴杆的安装。
16.进一步来说,机架包括机架本体,机架本体的一侧向上设有延伸至输送机处的导向支架。通过导向支架的设置能对输送机的倾斜移动进行导向。
17.进一步来说,机架本体的下端还安装有万向轮和支撑脚杯。通过万向轮的设置实现了机架本体的灵活移动,通过支撑脚杯的设置能对机架本体的位置进行固定。
附图说明
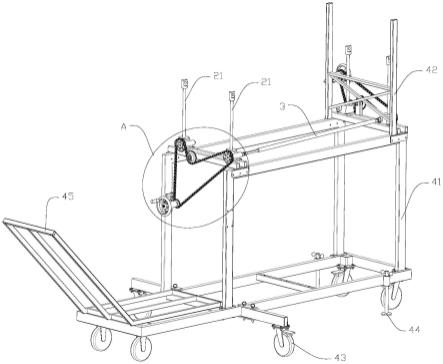
18.图1为本实用新型实施例的复式角度调整机构与输送机组装后的结构示意图;
19.图2为本实用新型实施例的复式角度调整机构的结构示意图;
20.图3为图2中a部位的局部放大图;
21.图4为本实用新型实施例的复式角度调整机构另一视角的结构示意图;
22.图5为本实用新型实施例的连杆机构的结构示意图。
23.图中:
24.1-输送机;
25.2-升降机构;21-升降推杆;22-丝杆升降机;231-驱动轮;232-传动轮;233-张紧轮;234-手轮;235-同步链条;
26.3-连杆机构;31-方轴;32-轴管;
27.4-机架;41-机架本体;42-导向支架;421-导向杆;422-支撑杆;43-万向轮;44-支撑脚杯;45-手推扶杆。
具体实施方式
28.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确
的界定。
29.实施例
30.参见附图1-3所示,本实用新型的一种复式角度调整机构,设置在输送机1的下方,用以调节输送机的倾斜角度。包括沿输送机1长度方向布设的两组升降机构2,每组升降机构2均包括能升降移动的至少一个升降推杆21,每个升降推杆21的上端部均与输送机1铰接;两组升降机构2之间通过连杆机构3实现同步运行,且两组升降机构2的升降推杆21的运动方向相反。
31.在一些实施例中,参见附图2、4所示,还包括用以安装升降机构2的机架4,机架4包括机架本体41,机架本体41的两侧分别安装有两组升降机构2,且机架本体41的一侧向上设有延伸至输送机1处的导向支架42。具体的,导向支架42包括位于输送机1两侧的两个导向杆421,导向杆421的下端固接在机架本体41上,两个导向杆421相对的一侧共同连接有支撑杆422。在输送机1角度调整的过程中,两个导向杆421始终位于输送机1的两侧,以对输送机1进行导向。
32.在一些实施例中,机架本体41的下端还安装有万向轮43和支撑脚杯44,机架本体41的一侧连接有手推扶杆45。通过万向轮43的设置便于机架本体41的灵活移动,能将输送机1及复式角度调整机构移动至工作位置上,通过支撑脚杯44的设置则能将机架本体41固定在工作位置上,以便于输送机1的装卸货,通过手推扶杆45的设置则便于人工施力推动机架本体41。需要注意的是,万向轮43和支撑脚杯44为现有技术,本实施例不再赘述其具体结构及工作原理。
33.在一些实施例中,升降机构2还包括与升降推杆21一一对应设置的丝杆升降机22,且每组升降机构2的所有丝杆升降机22通过传动组件连接以实现同步同向运行。示例性地,每组升降机构2包括两个升降推杆21,则对应的,丝杆升降机22也设置有两个。通过丝杆升降机22带动升降推杆21升降移动,通过传动组件实现了同组升降机构2的所有丝杆升降机22的同步同向运行,进而实现同组升降机构2的升降推杆21的同步同向升降。
34.具体的,参见附图3所示,传动组件包括驱动轮231、传动轮232、张紧轮233,其中,驱动轮231安装在机架4上,其上同轴连接有手轮234。传动轮232与丝杆升降机22一一对应设置,并与对应的丝杆升降机22连接。张紧轮233安装在机架4上,且驱动轮231、传动轮232、张紧轮233上共同绕设有呈闭环的同步带或同步链条235。
35.人工转动手轮234时,驱动轮233随之转动,进而带动同步带或同步链条235传动,传动轮232、张紧轮233随之转动,与传动轮232连接的丝杆升降机22随之运行。通过手轮234的设置便于人工施力以使驱动轮233转动,进而通过同步带或同步链条235带动传动轮232、张紧轮233转动,进而实现丝杆升降机22的运行;通过张紧轮233的设置能对同步带或同步链条235的松紧进行调节。
36.在输送机1的实际运用中,工人可能在地面上装卸货,也可能在车厢内装卸货,为了便于工人在地面或车厢内调节输送机的倾斜角度,在本实施例中,两组升降机构2的驱动轮231分别安装在机架4的不同高度上,以使对应的手轮234位于不同的高度位置上。具体的,一组升降机构2的驱动轮231安装在机架本体41的侧壁上,以便于工人在地面操控对应的手轮234,另一组升降机构2的驱动轮231安装在导向支架42的侧壁上,以便于工人在车厢内操控对应的手轮234。由于两组升降机构2通过连杆机构3连接,当工人在车厢或地面操控
手轮234时,两组升降机构2能同步运行。
37.在一些实施例中,丝杆升降机22包括安装在机架4上的固定壳体,固定壳体内设有能啮合传动的蜗轮、蜗杆,蜗杆的一端延伸出固定壳体并同轴连接有传动轮232,另一端延伸出壳体并朝向另一组升降机构2。蜗轮的轴心处螺纹连接有升降推杆21。当蜗杆转动时,蜗轮能同步转动,进而使与蜗轮螺纹连接的升降推杆21进行升降移动。需要注意的是,丝杆升降机22与升降推杆21的配合为现有技术,本实施例不再赘述其具体工作原理。
38.为了实现两组升降机构2的升降推杆21的反向运动,在一些实施例中,可将两组升降机构2的丝杆升降机22按不同方向装配到机架4上,以使两组升降机构2的蜗杆分别位于对应的蜗轮的不同侧,在两组升降机构2的蜗杆同向转动时,两组升降机构2的蜗轮能反向转动。具体的,为了便于描述,将一组升降机构2的丝杆升降机称之为一号丝杆升降机,将另一组升降机构2的丝杆升降机称之为二号丝杆升降机;且沿垂直于蜗杆长度方向上,一号丝杆升降机、二号丝杆升降机的蜗轮的一侧为a侧,另一侧为b侧。当一号丝杆升降机、二号丝杆升降机安装到机架上时,一号丝杆升降机的蜗杆位于对应的蜗轮的a侧,二号丝杆升降机的蜗杆位于对应的蜗轮的b侧;此时,一号丝杆升降机、二号丝杆升降机的蜗杆同向转动时,一号丝杆升降机(或二号丝杆升降机)的蜗轮顺时针转动,而二号丝杆升降机(或一号丝杆升降机)的蜗轮则逆时针转动。
39.需要注意的是,同组升降机构2的丝杆升降机安装方向相同,以保证同组升降机构2的升降推杆的运动方向相同。
40.在一些实施例中,参见附图2、5所示,连杆机构3包括传动轴杆,传动轴杆的一端与一组升降机构2的一个丝杆升降机22的蜗杆连接,另一端与另一组升降机构2的一个丝杆升降机22连接。通过传动轴杆的设置实现了两组升降机构2的蜗杆的同向转动。
41.更进一步地,为了适应两组升降机构2之间的间距变化,传动轴杆包括方轴31、轴管32,且轴管32套装在方轴31上并能沿方轴31轴向伸缩。通过方轴31、轴管32的配合实现了传动轴杆的轴向伸缩(即传动轴杆长度可变),以便于传动轴杆的安装,同时通过方轴31的设置能保证方轴31与轴管32的同步转动,进而保证将一组升降机构2的蜗杆转动传递给另一组升降机构2的蜗杆。
42.本实施例的具体工作过程如下:
43.工人手动转动一个手轮234(当工人在地面上时,可转动安装在机架本体侧壁上的手轮;当工人在车厢内时,可转动安装在导向支架侧壁上的手轮),对应的驱动轮231同步转动,并带动传动轮232、张紧轮233同步转动,此时,与之对应的一组升降机构2的丝杆升降机22同步运行,以使该组的升降推杆21同步上升(或下降);同时,传动轴杆转动,并带动另一组升降机构2的一个丝杆升降机22运行,该丝杆升降机22上的传动轮同步运行,并通过传动组件带动其余丝杆升降机22运行,此时,该组的升降推杆21同步下降(或上升);因两组升降机构2的升降推杆的反向移动,输送机1随即实现角度调节。
44.以上实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1