应用于起重机的冗余控制系统及其控制方法和存储介质与流程
本发明涉及起重机控制系统及冗余控制,尤其涉及应用于起重机的冗余控制系统及其控制方法和存储介质。
背景技术:
1、起重机作为建筑施工现场、生产车间重要的物料转运设备,其由于具有工作覆盖范围广、工作效率高的优点而被广泛应用,随着起重机的广泛应用,其在工作过程中发生的意外故障案例也随之增加,尤其是制动故障往往会带来较大的安全风险,为了提高起重机的工作可靠性,目前诸多起重机已经配置了冗余制动单元进行保障起重机制动功能的可靠性,但是目前对于起重机的冗余系统而言,其大部分只有在起重机发生制动故障时才介入,在此机制下,起重机的冗余系统往往长时间处于沉睡状态,若是遇到故障情况,则可能因为起重机的冗余制动系统介入时间不稳定而造成一定的损失,尤其是在介入延迟较长的情况下,因此,如何优化起重机主制动单元和冗余制动单元的介入切换可靠性,是具有非常现实意义的课题。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种操作灵活,实施可靠且稳定的应用于起重机的冗余控制系统及其控制方法和存储介质。
2、为了实现上述的技术目的,本发明所采用的技术方案为:
3、一种起重机冗余系统控制方法,所述起重机具有主制动单元和冗余制动单元,以及用于切换主制动单元和冗余制动单元工作介入的制动切换单元,其包括:
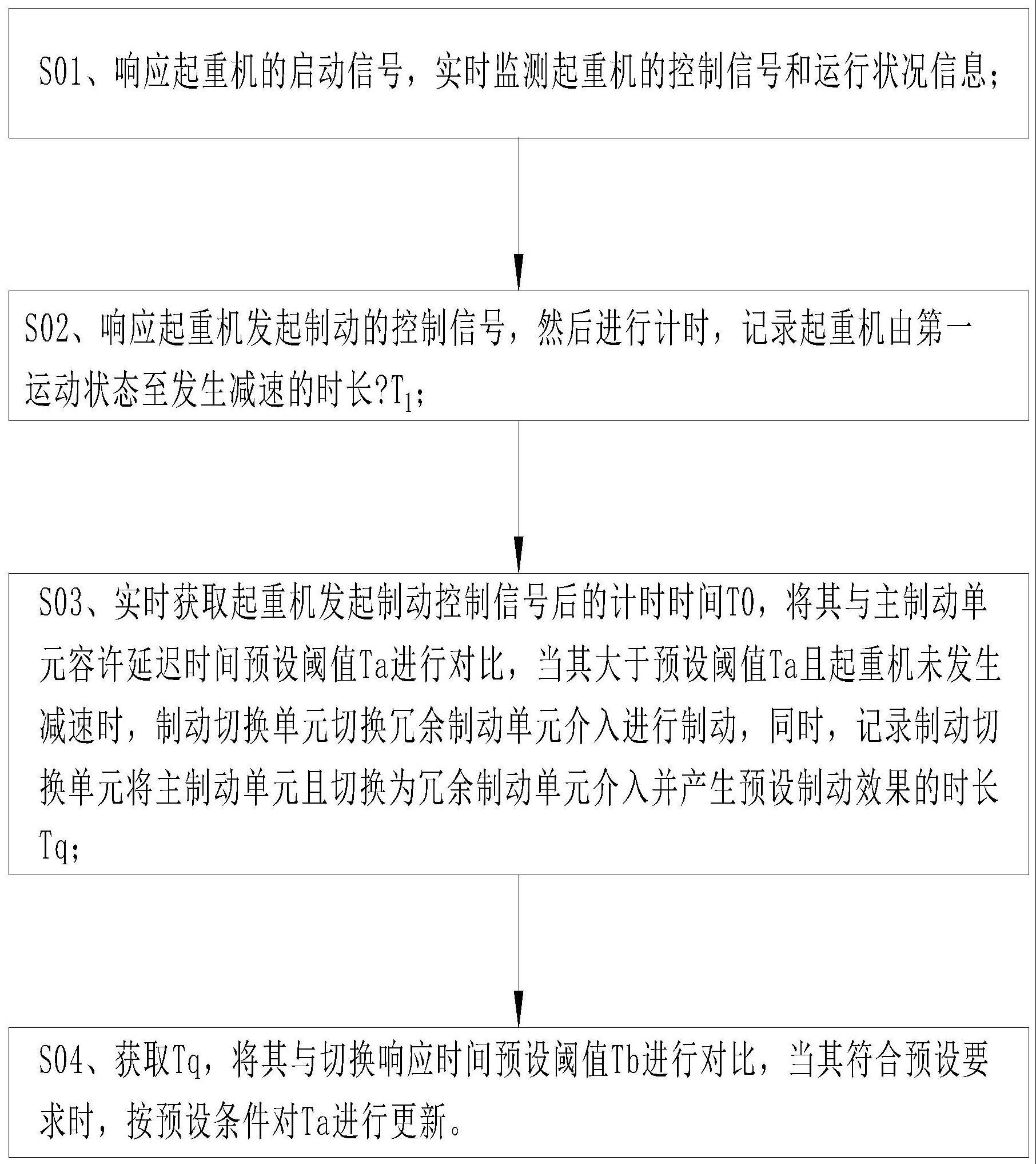
4、s01、响应起重机的启动信号,实时监测起重机的控制信号和运行状况信息;
5、s02、响应起重机发起制动的控制信号,然后进行计时,记录起重机由第一运动状态至发生减速的时长δt1;
6、s03、实时获取起重机发起制动控制信号后的计时时间t0,将其与主制动单元容许延迟时间预设阈值ta进行对比,当其大于预设阈值ta且起重机未发生减速时,制动切换单元切换冗余制动单元介入进行制动,同时,记录制动切换单元将主制动单元且切换为冗余制动单元介入并产生预设制动效果的时长tq;
7、s04、获取tq,将其与切换响应时间预设阈值tb进行对比,当其符合预设要求时,按预设条件对ta进行更新。
8、作为一种可能的实施方式,进一步,本方案s02、响应起重机发起制动的控制信号,然后进行计时,记录起重机由第一运动状态至发生减速的时长包括:
9、s021、响应起重机发起制动的控制信号,将该时间点记录为tf,同时进行制动响应计时;
10、s022、获取起重机的运行状况信息,调取起重机发起制动的控制信号对应的运动组件的运行状态,获取其在时间点为tf时的运动速度,将其设为第一运动状态;
11、s023、实时获取起重机在时间点tf之后的运行状况信息,调取起重机发起制动的控制信号对应的运动组件的运行速度,当运动速度小于时间点为tf时的运动速度时,则记录起重机由第一运动状态至发生减速的时长,其公式如下:
12、δt1=tj-tf
13、其中,δt1为起重机由第一运动状态至发生减速的时长,tj为起重机发起制动的控制信号对应的运动组件的运行速度小于其在时间点为tf时的运动速度时的时间点,tf为起重机发起制动控制信号时的时间点。
14、作为一种较优的选择实施方式,优选的,本方案s03、实时获取起重机发起制动控制信号后的计时时间t0,将其与主制动单元容许延迟时间预设阈值ta进行对比,当其大于预设阈值ta且起重机未发生减速时,制动切换单元切换冗余制动单元介入进行制动,同时,记录制动切换单元将主制动单元且切换为冗余制动单元介入并产生预设制动效果的时长tq包括:
15、s031、实时获取起重机发起制动控制信号后的计时时间t0,将其与预设阈值ta进行对比,当其大于预设阈值ta且起重机未发生减速时,制动切换单元将主制动单元且切换为冗余制动单元,由冗余制动单元介入对起重机进行制动,同时记录该时间节点为t1;
16、s032、实时获取起重机在时间点t1之后的运行状况信息,调取起重机发起制动的控制信号对应的运动组件的运行速度,当运动速度小于时间点为t1时的运动速度时,则记录该时间点t2用于标记起重机冗余制动单元介入产生效果,当运行速度小于预设值时,则记录该时间点t3用于标记起重机冗余单元介入产生预设效果,然后计算制动切换单元将主制动单元且切换为冗余制动单元介入并产生制动效果的表征数据,其公式如下:
17、δt2=t2-t1
18、tq=t3-tf
19、其中,δt2为起重机冗余制动单元介入产生减速效果的时长,tq为起重机制动切换单元将主制动单元切换为冗余制动单元介入并产生预设制动效果的时长。
20、作为一种较优的选择实施方式,优选的,本方案s04、获取tq,将其与预设切换响应时间预设阈值tb进行对比,当其符合预设要求时,按预设条件对ta进行更新包括:
21、s041、获取tq,将其与预设切换响应时间预设阈值tb进行对比,当其小于tb时,对ta进行更新,其公式为:
22、ta′=ta+(tb-tq)
23、其中,ta′为更新后的主制动单元容许延迟时间阈值,ta为当前主制动单元容许延迟时间阈值,tb为预设切换响应时间预设阈值,tq为起重机制动切换单元将主制动单元切换为冗余制动单元介入并产生预设制动效果的时长。
24、作为一种可能的实施方式,进一步,本方案还包括:
25、记录起重机主制动单元的工作介入次数,然后按预设要求切换冗余制动单元介入起重机之后一次或多次的制动指令操作,同时,记录冗余制动单元介入后,起重机的减速状态信息并保存。
26、作为一种较优的选择实施方式,优选的,本方案还包括:
27、按预设要求对冗余制动单元介入后,起重机的减速状态信息进行判断,当其不符合预设要求时,输出冗余制动单元故障预警;
28、其中,所述起重机的减速状态信息包括起重机由第一速度减速至第二速度所耗费的时长。
29、作为一种较优的选择实施方式,优选的,本方案s03、实时获取起重机发起制动控制信号后的计时时间t0,将其与主制动单元容许延迟时间预设阈值ta进行对比,当其大于预设阈值ta且起重机未发生减速时,还输出主动制动单元故障预警。
30、作为一种较优的选择实施方式,优选的,本方案所述主制动单元和冗余制动单元用于起重机的机身旋转驱动机构或吊钩升降驱动机构的制动。
31、基于上述,本发明还提出一种应用于起重机的冗余控制系统,其包括:
32、主制动单元,用于起重机的机身旋转驱动机构或吊钩升降驱动机构的制动;
33、冗余制动单元,用于起重机的机身旋转驱动机构或吊钩升降驱动机构的制动;
34、制动切换单元,用于切换主制动单元或冗余制动单元介入工作;
35、运行监测单元,用于响应起重机的启动信号,实时监测起重机的控制信号和运行状况信息;
36、时间记录单元,用于响应起重机发起制动的控制信号,然后进行计时,记录起重机由第一运动状态至发生减速的时长δt1,还用于记录制动切换单元将主制动单元且切换为冗余制动单元介入并产生预设制动效果的时长tq;
37、数据处理单元,用于实时获取起重机发起制动控制信号后的计时时间t0,将其与主制动单元容许延迟时间预设阈值ta进行对比,当其大于预设阈值ta且起重机未发生减速时,向制动切换单元发出切换冗余制动单元介入进行制动的指令,其还用于获取tq,将其与切换响应时间预设阈值tb进行对比,当其符合预设要求时,按预设条件对ta进行更新。
38、基于上述,本发明还提出一种计算机可读的存储介质,所述的存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述的至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行实现上述所述的起重机冗余系统控制方法。
39、采用上述的技术方案,本发明与现有技术相比,其具有的有益效果为:本方案通过在起重机发起制动控制信号后进行计时,以此来判断主制动单元接入的时间,当其超过预设时长未介入制动时,则切换冗余制动单元进行制动介入,提高了起重机的制动可靠性,本方案在冗余制动单元介入后,还通过对冗余制动介入的时间阈值进行灵活调整,使得当冗余制动单元介入的延迟变小时,通过在容许延迟内,适当调整主制动单元的容许延迟,可以有助于避免冗余制动单元的频繁介入,在保证安全的情况下,提高主制动单元的使用充分程度。
- 还没有人留言评论。精彩留言会获得点赞!