一种工业智能仓储堆垛机远程控制寻址方法及设备与流程
本发明属于工业智能仓储应用,尤其涉及一种工业智能仓储堆垛机远程控制寻址方法及设备。
背景技术:
1、智慧物流仓储是工业4.0的核心组成部分,是连接制造端和客户端的核心环节。现阶段,智慧物流仓储迎来了发展的“黄金阶段”。随着中国智造、互联网+的发展,智能化和信息化技术在生产与物流中被快速普及应用,为其注入“智慧”的基因,所有核心环节都将变得更加“智能”和高效。即通过先进的物联网、互联网技术,通过信息处理和网络通信技术平台,实现货物出入库、运输过程的自动化运作和高效化的管理。
2、仓储堆垛机是一种专门用于仓库货物堆垛的设备,在仓库、车间等处攫取、搬运和堆垛或从高层货架上取放单元货物。它是一种仓储设备,随着社会的发展,大量的货物储存推动着堆垛机的自动化存储发展。
3、如何快速的构建高效自动化智能仓储是所有环节中的最重要的一环,其中对于堆垛机的自动控制是仓储系统中做复杂的一环,目前大多数立体仓库的堆垛都是使用比较昂贵的plc设备进行有线连接,尤其物品位置非常多的情况下,plc对多个步进电机的控制程序都非常的复杂,尤其对于大型的立体仓库矩阵,则整体构建成本更高、开发周期漫长等,而且一旦立体仓库特征发生变化,都要对plc程序进行整体功能修改和代码测试,不利于快速上线等。
技术实现思路
1、本发明针对堆垛机远程控制寻址所存在的技术问题,提出一种设计合理、方法简单、理论性强且能够实现成本低、操作简单、灵活以及拓展性强的一种工业智能仓储堆垛机远程控制寻址方法及设备。
2、为了达到上述目的,本发明采用的技术方案为:一种工业智能仓储堆垛机远程控制寻址方法及设备,包括如下步骤:
3、s1、根据本地自动化仓储中所有立体仓库进行顺序编号,生成一维立体仓库堆垛机数组,[d1,d2,d3,d4,d5,d6,d7,d8...dn],根据每个编号堆垛机对应的所有方向运动轴及控制的步进电机进行编号生成一维数组,[b1,b2,b3,b4,b5...bn],整体仓库单元所有立库仓库编号和对应的步进电机,构成散列哈希表;
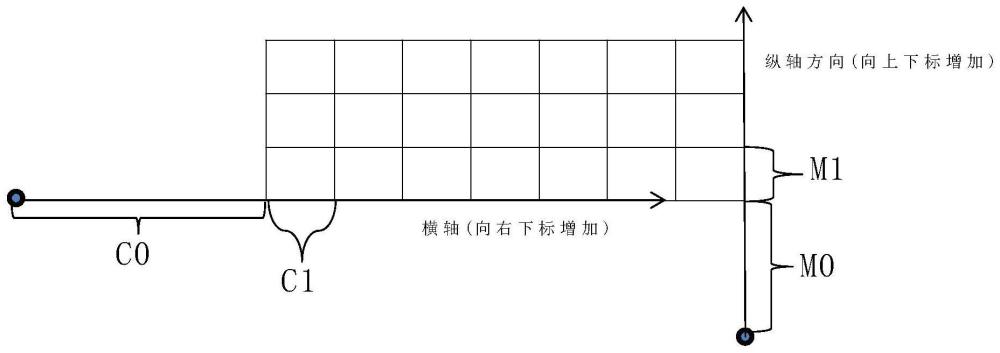
4、s2、以堆舵机编号为基准,获取所有立体仓库中所有仓储位置的对应各种轴向及控制脉冲矩阵,使用串口工具对堆垛机的所有轴向驱动电机发送脉冲驱动对应舵机指定轴向到达立库所对轴向的边缘,到达后发送的脉冲数记录为c0,然后开始发送脉冲数直到舵机抵达第二列开始边缘,并记录发送的脉冲数为c1,即通过一个存储格子横轴的脉冲数据,得到b1步进电机到达第d1立库第n列立库位置的横轴对应的脉冲数为:
5、b1(n)=c0+(n-1)*c1+c1/2
6、编号为d1立库对应的[b1,b2,b3,b4,b5...bn]各轴到达指定位置进行夹取货物的步进电机协同脉冲数矩阵,为了便于清晰理解和表达矩阵的关联关系,使用b1+下标的方式来表示b1方向到达下标的脉冲数,并以最常用的三维空间xyz表达,z轴为深度为1对应的d1立库的脉冲矩阵其表达是为:
7、[
8、[b1x(1),b2y(n),b3z(1)...],[b1x(2),b2y(n),b3z(1)...]...[b1x(n),b2y(n),b3z(1)...],
9、[b1x(1),b2y(n-1),b3z(1)...],[b1x(2),b2y(n-1),b3z(1)...]...[b1xn,b2y(n-1),b3z(1)...],
10、...
11、[b1x(1),b2y(1),b3z(1)...],[b1x(2),b2y(1),b3z(1)...]...[b1x(n),b2y(1),b3z(1)...]
12、]
13、生成[d1,d2,d3,d4,d5,d6,d7,d8...dn]所有对应的脉冲矩阵;
14、s3、设定本地自动化仓储单元中所有步进电机正反转策略,所述策略为远离跺机原点方向为正转,回原点方向定位为反转,检查所有步进电机接线策略,保持一致;
15、s4、在对应编号堆垛机上使用无线通信模块硬件485串连接各轴步进电机驱动器;
16、s5、使用带有无线通信模块的控制终端,编写调度算法,对外提供如下接口参数,dnum表示立体仓库单元的编号,[b1co,b1c1,b2co,b2c1,b3co,b3c1,b4co,b4c1...]分别对应3号仓库各轴[b1,b2,b3,b4...]各轴测试的标准c0和c1数据,系统根据输入的立库单元编号和对应各轴的测试标准数据,生成对应的脉冲矩阵,系统将拥有整个仓储中心的所有仓储单元的脉冲矩阵;
17、s6、所有立库单元中的堆垛机工作的时候初始各轴的位置为原点,如果调度某个堆垛机到某个位置的时候,根据系统生成的脉冲矩阵获取该舵机目标位置对应的脉冲数据,使用目标脉冲矩阵和目前位置脉冲矩阵进行对应轴相减,如果值>0,代表需要步进电机进行正传,如果值小于0则进行反转,步进脉冲数就是相减后的绝对值,依次得到各轴的增量(δb1,δb2,δb3...),系统将各轴的增量脉冲绝对值发送指令给对应各轴步进电机,同时根据增量脉冲的正负对应发送设定对应各轴的正反转方向,待指令发送执行完毕后,记录和存储目前位置;
18、s7、控制终端断电重启的时候加载上次的整体立库单元的位置数据及矩阵数据,避免因为重启丢失数据导致调度堆垛机出错,提高堆垛机的使用效率。
19、所述一种工业智能仓储堆垛机远程控制寻址实施设备系统包括无线通信lora转485模块,控制终端、调度软件组成,具体工作实施流程如下:
20、s2-1:针对堆垛机对应各轴步进电机驱动器安装无线通信模块转485模块,以便于可以无线下发脉冲数据来驱动电机动作;
21、s2-2:控制终端为工业普通网关硬件终端,安装有linux操作系统,并配备lora转485模块,确认驱动正确安装,使用串口工具进行验证通信是否正常;
22、s2-3:在控制终端安装调度软件模块,将现场所有立库单元的参数数据输入配置文件,启动调度软件开始工作;
23、s2-4:模拟调度堆垛机到立库的某个位置,使用调度软件进行下发指令,便可以看到堆垛机的各轴开始动作并驱动电机到达指定位置,再次改变目标位置,查看堆垛机的形式轨迹;
24、s2-5:控制终端及堆垛机进行断电并重启,继续重复s2-4步骤,确认系统加载历史数据并能正确响应调度。
25、作为优选,所述步骤s1中步进电机的编号依序增加。
26、作为优选,所述步骤s2的前提是立体仓库和堆垛机位置安装固定。
27、作为优选,所述步骤s2的关联关系不仅限于三维空间。
28、作为优选,所述步骤s2生成[d1,d2,d3,d4,d5,d6,d7,d8...dn]所有对应的脉冲矩阵的过程通过代码生成。
29、与现有技术相比,本发明的优点和积极效果在于:
30、本发明输入各轴对应的几组参数数据再通过算法快速的驱动步进电机进行寻址,除自身堆垛机无需其他辅助设备和装置,减少了传统需要安装rfid、红外测距等其他辅助定位设备的成本费用,操作简单,可快速上线立库调度和运行,大大减少系统的研发周期和上线时间,能够快速为企业赋能。控制终端采用无线控制指令方案,避免了通过plc进行控制有线的连接,减少硬件成本投资,并通过lora模块可以同时调度控制上百个舵机单元,尤其在大型的综合立体仓库,可以节约非常可观的成本,减少硬连接,便于立库的位置的不断更新或迭代,整体调度非常灵活,拓展性强。
- 还没有人留言评论。精彩留言会获得点赞!