一种气动穿线引拉设备的制作方法
本发明属于电气穿线施工设备,特别涉及一种气动穿线引拉设备。
背景技术:
1、在建筑施工结束后,需要在建筑内安装电路,电路铺设时,为了保证电线的安全使用,需技术工人进行电气穿线工作,普遍的施工方法为人工钢丝或电动穿线机用钢丝穿线。因人工钢丝穿线的方法效率较低,电动穿线机用钢丝穿线在遇到转弯角度较大的管道时施工难度较大,故气动穿线法逐渐替代两者地位。
2、气动穿线法是指利用高压气流推动引线端的活塞,达到穿线的目的。例如:现有技术中公开了气推式管道自动穿线方法及设备,其申请号:cn201810288155.8、申请日:2018-03-30、公告号:cn108387990b、公告日:2020-06-26;该设备包括气枪体、气动装置、盘线轮和电机组件,导线在气枪体的帮助下进入待穿射的管道,气动装置提供导线前进所需气压,在电机组件的协助下导线穿过管道到达管道尽头,在管道尽头将导线与套管连接,电机反转拉动导线回旋到盘线轮上,导线带动套管穿入管道并拉出,完成穿线动作。其不足之处在于:每次穿线需根据管道内径大小更换合适的气枪头及导线头,影响穿线效率;不适用于弯角较多且路径较长的管道,若导线在收放线过程中人员未及时调整电机转速,易造成导线堆叠甚至打结的现象。
技术实现思路
1、本发明的目的是提供一种气动穿线引拉设备,能够适时、灵活地对引线发放和回收的速度进行控制,提升了气动穿线引拉设备的可靠性和有效性。
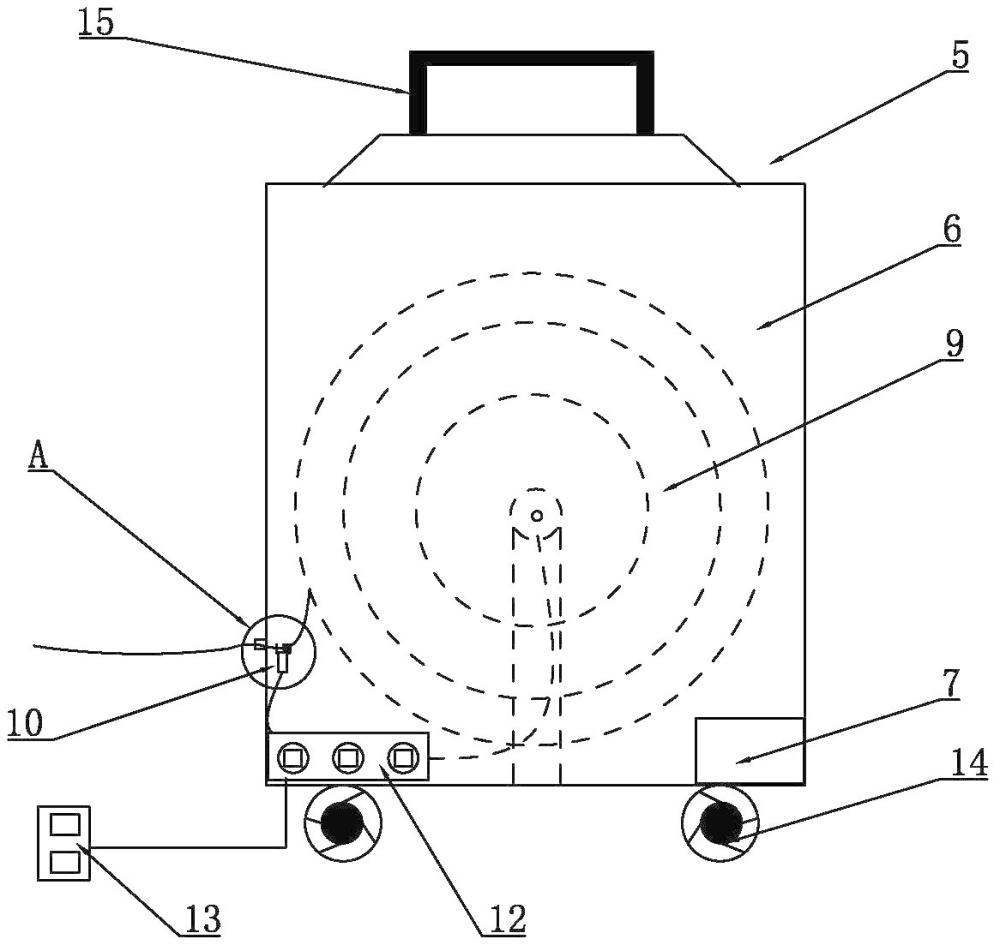
2、为实现上述目的,本发明采用如下技术方案:一种气动穿线引拉设备,包括:软质鱼尾球,用于牵引引线;空气压缩装置,用于推动所述软质鱼尾球和引线在线管内穿行;收放线装置,用于分别在人工模式和自动模式下对引线进行发放和回收;所述收放线装置包括伺服电机、感应装置和控制面板,所述伺服电机输出端设置有收线盘,所述收线盘上卷绕有若干圈引线,所述感应装置用于检测引线是否处于紧绷状态,所述控制面板上设置有手动/自动模式切换旋钮和伺服电机的启停按钮,所述伺服电机、感应装置和控制面板均与控制器连接;切换至手动模式时,所述控制器控制伺服电机按照设定的正向转速驱动收线盘正转以发放引线,控制伺服电机按照设定的反向转速驱动收线盘反转以回收引线;切换至自动模式时,所述控制器通过感应装置接收引线的状态信号,经逻辑判断后输出信号调整伺服电机的正/反向转速和伺服电机的开启和关闭。
3、本发明使用时,启动空气压缩装置和收放线装置,收放线装置执行放线动作,与此同时,压缩空气推动软质鱼尾球从线管入口进入线管内部,直至越过线管出口并将引线带出线管,人员手动解开鱼尾球和引线,将电线与引线连接固定后,收放线装置执行收线动作,引线将电线从线管出口带入线管内,直至将电线拉至线管进口处,完成拉回电线的穿线目的。与现有技术相比,本发明的有益效果在于:通过旋钮可随时切换手动/自动模式,自动模式下可确保收放线过程中,引线始终处于紧绷状态,避免多余引线堆积,大大提高施工效率;引拉电线时,可切换为手动模式协助人员拉回电线,伺服电机按照设定的反向转速工作,可以保证拉力与重力、摩擦力的平衡,使电线和引线均处于平衡状态,避免中途发生断裂;软质鱼尾球的尾巴可堵住线管管壁与鱼尾球之间的间隙,形成密封结构增大先关内部气体压力,完成牵引引线的工作,无需根据管壁内径大小更换软质鱼尾球,简化穿线步骤。
4、作为本技术方案的进一步改进,所述控制器由plc、单片机或含有cpu的电路模块组成。
5、作为本技术方案的进一步改进,在所述自动模式下,所述感应装置每隔一个时间周期t检测引线状态并发出检测信号;在第i个时间周期内,伺服电机的正向转速为vi,所述控制器在时长区间t1内连续多次收到引线未绷直的信号则输出减速信号,控制伺服电机减速(5~10%)vi;在第i+1个时间周期内,伺服电机的正向转速为vi+1,所述控制器在时长区间t1内收到引线未绷直的信号则输出减速信号,控制伺服电机发出多次减速(5~10%)vi+1直至停机;当连续两个检测周期均发出减速信号且伺服电机低转速arpm,控制器则输出急停信号,控制伺服电机停机后反向旋转直至控制器接收到引线已绷直的信号,至此完成停机动作。控制器基于即时正向转速对伺服电机进行调速控制,提高电机的运行效率,节约能源,降低能耗成本。
6、作为本技术方案的进一步改进,在所述自动模式下,所述感应装置每隔一个时间周期t检测引线状态并发出检测信号;在第j个时间周期内,伺服电机的正向转速为vj,所述控制器在时长区间t2内连续多次收到引线已绷直的信号则输出加速信号,制伺服电机加速(5~10%)vj;在第j+1个时间周期内,伺服电机的正向转速为vj+1,所述控制器在时长区间t2内收到引线已绷直的信号则输出加速信号,控制伺服电机发出多次加速(5~10%)vj+1直至达到合理速度v合。控制器基于即时正向转速对伺服电机进行调速控制,进一步灵活地提高放线速度。
7、作为本技术方案的进一步改进,在所述手动/自动模式下,所述控制器通过接收控制面板发出的启动或停止信号控制伺服电机工作或停机。
8、作为本技术方案的进一步改进,所述感应装置包括金属环、传感器和两块对应设置的限位板,所述限位板上开设有容引线穿过的圆孔,所述金属环可滑动地套设在引线上,两块所述限位板之间的区域为金属环活动区,所述传感器设置在活动区下方。
9、作为本技术方案的进一步改进,所述软质鱼尾球包括导向部和围绕在导向部外周的尾部。导向部非必须是球体,其前端可以是半圆形的,也可以其它形状,只需满足有利于尾部自行密封漏缝隙,且能够在线管中自动移动通过线管的要求即可。
10、作为本技术方案的进一步改进,所述空气压缩装置包括压缩气源和导气组件,所述导气组件包括内设气道的导气管和气阀门控制开关,所述导气管一端与空气压缩机输出端连通,所述导气管另一端经过渡接头与连接软管固定连接,所述过渡接头或连接软管上设置有容引线穿过的通孔。
11、作为本技术方案的进一步改进,所述收线盘括两个互相对应设置的圆盘,两个所述圆盘之间设置有圆筒,所述圆筒可转动地设置在中心轴外侧,所述中心轴一端通过联轴器与伺服电机输出轴连接,所述引线一端卷绕在圆筒上,另一端依次经过感应装置和空气压缩装置后与软质鱼尾球可拆卸地连接。
12、作为本技术方案的进一步改进,所述软质鱼尾球由橡塑材料和软质纤维材料中的一种或两种按任意比例组成。
13、作为本技术方案的进一步改进,所述引线为软质细线且由耐磨耐拉伸的材料制成。
技术特征:
1.一种气动穿线引拉设备,其特征在于,包括:
2.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,在所述自动模式下,所述感应装置每隔一个时间周期t检测引线状态并发出检测信号;在第i个时间周期内,伺服电机的正向转速为vi,所述控制器在时长区间t1内连续多次收到引线未绷直的信号则输出减速信号,控制伺服电机减速(5~10%)vi;在第i+1个时间周期内,伺服电机的正向转速为vi+1,所述控制器在时长区间t1内收到引线未绷直的信号则输出减速信号,控制伺服电机发出多次减速(5~10%)vi+1直至停机;当连续两个检测周期均发出减速信号且伺服电机低转速arpm,控制器则输出急停信号,控制伺服电机停机后反向旋转直至控制器接收到引线已绷直的信号,至此完成停机动作。
3.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,在所述自动模式下,所述感应装置每隔一个时间周期t检测引线状态并发出检测信号;在第j个时间周期内,伺服电机的正向转速为vj,所述控制器在时长区间t2内连续多次收到引线已绷直的信号则输出加速信号,制伺服电机加速(5~10%)vj;在第j+1个时间周期内,伺服电机的正向转速为vj+1,所述控制器在时长区间t2内收到引线已绷直的信号则输出加速信号,控制伺服电机发出多次加速(5~10%)vj+1直至达到合理速度v合。
4.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,在所述手动/自动模式下,所述控制器通过接收控制面板发出的启动或停止信号控制伺服电机工作或停机。
5.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,所述感应装置包括金属环、传感器和两块对应设置的限位板,所述限位板上开设有容引线穿过的圆孔,所述金属环可滑动地套设在引线上,两块所述限位板之间的区域为金属环活动区,所述传感器设置在活动区下方。
6.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,所述软质鱼尾球包括导向部和围绕在导向部外周的尾部。
7.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,所述空气压缩装置包括压缩气源和导气组件,所述导气组件包括内设气道的导气管和气阀门控制开关,所述导气管一端与空气压缩机输出端连通,所述导气管另一端经过渡接头与连接软管固定连接,所述过渡接头或连接软管上设置有容引线穿过的通孔。
8.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,所述收线盘括两个互相对应设置的圆盘,两个所述圆盘之间设置有圆筒,所述圆筒可转动地设置在中心轴外侧,所述中心轴一端通过联轴器与伺服电机输出轴连接,所述引线一端卷绕在圆筒上,另一端依次经过感应装置和空气压缩装置后与软质鱼尾球可拆卸地连接。
9.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,所述软质鱼尾球由橡塑材料和软质纤维材料中的一种或两种按任意比例组成。
10.根据权利要求1所述的一种气动穿线引拉设备,其特征在于,所述引线为软质细线且由耐磨耐拉伸的材料制成。
技术总结
本发明公开了电气穿线施工设备领域内的一种气动穿线引拉设备,包括:软质鱼尾球,用于牵引引线;空气压缩装置,用于推动软质鱼尾球和引线在线管内穿行;收放线装置,用于分别在人工模式和自动模式下对引线进行发放和回收;收放线装置包括伺服电机、收线盘、控制器和用于检测引线是否处于紧绷状态的感应装置;手动模式下,控制器控制伺服电机按照设定的正向转速驱动收线盘正转以发放引线,控制伺服电机按照设定的反向转速驱动收线盘反转以回收引线;自动模式下,控制器通过感应装置接收引线的状态信号,经逻辑判断后输出信号调整伺服电机的正/反向转速和伺服电机的开启和关闭。本发明能够适时、灵活地对引线发放和回收的速度进行控制。
技术研发人员:朱开云,朱晓俊,邓灿,朱领军
受保护的技术使用者:江苏帅因特光电科技开发有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!