用于吹塑膜厚度测量的方法和系统与流程
1.本公开涉及用于膜厚度测量的方法和系统。
背景技术:
2.传感器系统广泛用于测量膜状材料或网状材料的厚度。例如,吹塑膜制造线具有许多用于卡尺测量的选项。膜厚度传感器系统在例如美国专利号8,212,574和9,470,504中有所描述。吹塑膜挤出系统在例如美国专利号6,702,563、美国专利号5,951,926和美国专利号5,505,601中有所描述。
技术实现要素:
3.提供了吹塑膜生产线的在线测量的方法和系统。
4.在一个方面,提供了一种用于吹塑膜的在线测量的感测系统。该感测系统包括:太赫兹(thz)传感器,该thz传感器定位在从吹塑膜模头挤出的膜泡附近;和传感器支撑件,该传感器支撑件被构造为围绕该膜泡的周边引导thz传感器。该thz传感器为配置为朝向膜泡发射thz束并检测从膜泡反射的信号。
5.在另一方面,提供了一种用于在线测量吹塑膜的方法。该方法包括:提供太赫兹(thz)传感器,该thz传感器定位在从吹塑膜模头挤出的膜泡附近;经由传感器支撑件围绕膜泡的周边引导thz传感器;以及经由thz传感器测量膜泡的膜厚度分布。
6.在本公开的示例性实施方案中获取各种意料不到的结果和优点。本公开的示例性实施方案的一个这样的优点是:一个或多个太赫兹(thz)传感器用于测量吹塑膜生产线中的膜泡。thz传感器可在离开膜泡的安全距离处提供具有高空间分辨率的准确厚度测量。
附图说明
7.结合附图考虑到以下对本公开的各种实施方案的详细说明可以更全面地理解本公开,其中:
8.图1a为根据一个实施方案的吹塑膜制造线的示意图。
9.图1b为图1a的吹塑膜制造线的顶视图。
10.图2a为根据一个实施方案的thz传感器的框图。
11.图2b为根据一个实施方案的由thz传感器检测膜泡的一部分的示意图。
12.图3a示出了根据一个实施方案的吹塑膜制造线的一部分的示意图。
13.图3b为根据另一实施方案的吹塑膜制造线的一部分的示意图。
14.图3c为根据另一实施方案的吹塑膜制造线的一部分的示意图。
15.图3d为根据另一实施方案的吹塑膜制造线的一部分的示意图。
16.图4a示出了根据一个实施方案的通过检测膜泡获得的thz传感器信号。
17.图4b为图4a的thz传感器信号的放大部分视图。
18.图4c为图4b的thz传感器信号的解卷积波形。
19.图5a示出了根据一个实施方案的通过检测吹塑膜获得的thz传感器的峰-时间分布。
20.图5b示出了对应于图5a的峰-时间分布的膜厚度分布。
21.在所示实施方案的以下描述中,参考了附图并通过举例说明的方式在这些附图中示出了其中可实践本公开的各种实施方案。应当理解,在不脱离本公开的范围的情况下,可利用实施方案并且可进行结构上的改变。图未必按照比例绘制。图中使用的相似数字指代相似的部件。然而,应当理解,在给定图中使用数字指代部件不旨在限制另一个图中用相同数字标记的部件。
具体实施方式
22.对于以下定义术语的术语表,除非在权利要求书或说明书中的别处提供不同的定义,否则整个申请应以这些定义为准。
23.术语表
24.在整个说明书和权利要求书中使用某些术语,虽然大部分为人们所熟知,但仍可需要作出一些解释。应当理解:
25.术语“吹塑膜生产线或工艺”是指使用一个或多个挤出机、环形模头和风扇来获取所提供的输入材料,将其熔化,并产生材料柱,然后使其变平并卷成卷的制造装备的聚集。
26.通过所公开的涂覆制品中的各种元件的位置使用取向术语诸如“在
…
顶上”、“在
…
上”、“在
…
之上”“覆盖”、“最上方”、“在
…
下面”等,我们指元件相对于水平设置的、面向上方的基底的相对位置。然而,除非另外指明,否则本发明并非旨在基底或制品在制造期间或在制造后应具有任何特定的空间取向。
27.通过使用术语“外覆”来描述层相对于本公开的制品的基底或其它元件的位置,我们将该层称为在基底或其它元件的顶上,但未必与基底或其它元件邻接。
28.关于数值或形状的术语“约”或“大约”意指该数值或特性或特征的+/-5%,但明确地包括确切的数值。例如,“约”1pa-s的粘度是指从0.95pa-s至1.05pa-s的粘度,但也明确地包括刚好1pa-s的粘度。类似地,“基本上正方形”的周边旨在描述具有四条侧棱的几何形状,其中每条侧棱的长度为任何其它侧棱的长度的95%至105%,但也包括其中每条侧棱刚好具有相同长度的几何形状。
29.关于特性或特征的术语“基本上”是指该特性或特征表现出的程度大于该特性或特征的相对面表现出的程度。例如,“基本上”透明的基底是指与不透射(例如,吸收和反射)相比透射更多辐射(例如,可见光)的基底。因此,透射多于50%的入射在其表面上的可见光的基底是基本上透明的,但透射50%或更少的入射在其表面上的可见光的基底不是基本上透明的。
30.如本说明书和所附实施方案中所用,除非内容清楚指示其它含义,否则单数形式“一个”、“一种”和“该/所述”包括多个指代物。因此,例如,提及包含“一种化合物”的细纤维包括两种或更多种化合物的混合物。如本说明书和所附实施方案中所用的,除非所述内容明确地另有规定,否则术语“或”通常以其包括“和/或”的含义使用。
31.如本说明书中所用的,通过端点表述的数值范围包括该范围内所包括的所有数值(例如,1至5包括1、1.5、2、2.75、3、3.8、4和5)。
32.除非另外指明,否则本说明书和实施方案中所使用的表达量或成分、特性测量等的所有数字在所有情况下均应理解成由术语“约”来修饰。因此,除非有相反的说明,否则在上述说明书和所附实施方案列表中示出的数值参数可根据本领域的技术人员利用本公开的教导内容寻求获得的期望特性而变化。最低程度上说,并且在不试图将等同原则的应用限制到受权利要求书保护的实施方案的范围内的情况下,每个数值参数应至少根据所报告的有效位数并通过应用惯常的四舍五入法来解释。
33.在不脱离本公开实质和范围的情况下,可对本公开的示例性实施方案进行各种修改和更改。现在将具体参考附图对本公开的各种示例性实施方案进行描述。在不脱离本公开实质和范围的情况下,可对本公开的示例性实施方案进行各种修改和更改。因此,应当理解,本公开的实施方案并不限于以下所述的示例性实施方案,而应受权利要求书及其任何等同物中示出的限制因素的控制。
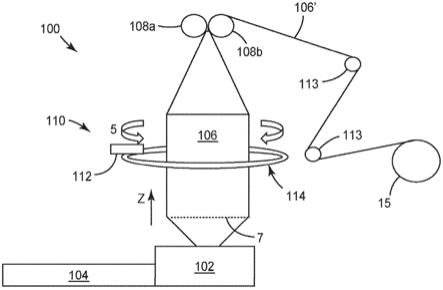
34.图1a为根据一个实施方案的吹塑膜制造系统或制造线100的示意图。图1b为图1a的系统100的顶视图。系统100包括吹塑膜模头102,该吹塑膜模头与挤出机104联接以挤出膜泡或膜管106,该膜泡或膜管沿箭头z的方向移动。将膜泡106冷却,然后由展平区段压塌成双层膜(doubled film)106'。在图1a的所描绘的实施方案中,该展平区段包括一组压料辊108a和108b。然后,例如经由惰辊113传送双层膜106’,并通过辊卷绕机15卷绕成卷。
35.典型的吹塑膜挤出工艺可竖直向上、水平或向下进行。可将聚合物材料压实并熔化以形成连续的粘性液体。然后可通过模头102挤出熔融塑料。可通过模头102中心的孔注入空气,并且压力可导致挤出的熔体膨胀成气泡。可从模头中连续地拉出气泡,并且可设置冷却环(图1a中未示出)以将空气吹到膜上。也可使用内部气泡冷却从内部冷却膜泡。在霜线7处固化后,膜可移动到该组压料辊108a至108b中,该组压料辊将气泡膜106压塌并使其变平成双层膜106'。
36.系统100还包括传感器系统110,该传感器系统包括传感器112,该传感器定位在膜泡106附近,具有如图1b所示的间隔距离d。传感器112可包括例如太赫兹(thz)传感器,该thz传感器被配置为朝向膜泡106发射thz辐射/束并检测来自膜泡106的反射信号。图2a中示出了示例性thz传感器的框图,其将在下文进一步描述。
37.在一些实施方案中,传感器系统110还可以包括处理器,以处理信号,从而确定膜泡106的一个或多个物理特性(例如,厚度)。在一些实施方案中,处理器可与传感器集成在一起作为一体式传感器设备。在一些实施方案中,处理器可为远程处理器。在一些实施方案中,处理器可功能性地连接到系统100的控制器。
38.传感器系统110还包括传感器支撑件114以支撑和引导传感器112。在图1a至图1b的所描绘的实施方案中,传感器支撑件114包括围绕膜泡106的周边的扫描仪轨道。传感器支撑件114被构造为将传感器112定位在离开膜泡106的安全距离(例如,间隔距离d)处。在图1a至图1b的所描绘的实施方案中,传感器支撑件114可沿周边方向5围绕膜泡106连续地移动,同时传感器112正在测量膜泡106。传感器支撑件114可引导传感器112以任何合适的方式围绕膜泡106的周边移动,例如,如箭头5所指示的振荡移动、向心移动、沿着z箭头的轴向移动、沿着径向方向r的径向移动等。
39.传感器112与膜泡106之间的间隔距离d可根据许多因素而变化,诸如例如针对传感器112所选择的束光学器件的焦距、膜泡106沿着径向方向r的操作波动等。一般来讲,传
感器112可位于离开膜泡106的安全距离处,使得可避免在吹塑膜工艺期间它们之间的偶然接触。间隔距离d的示例性范围可为约5mm至约500mm、约10mm至约300mm、或约10mm至约200mm。在一些实施方案中,间隔距离d可为不小于约5mm、不小于约10mm、不小于约15mm、不小于约20mm、不小于约25mm、不小于约30mm或不小于约40mm。在一些实施方案中,当使用25mm焦距透镜时,间隔距离d的典型范围可为例如约10mm至约40mm。在一些实施方案中,当使用75mm焦距透镜时,间隔距离d的典型范围可为例如约60mm至约90mm。在一些实施方案中,当使用150mm焦距透镜时,间隔距离d的典型范围可为例如约135mm至约165mm。
40.通常,在吹塑膜挤出工艺期间,膜泡106的直径可沿着径向方向r波动。膜泡106的气泡壁沿着径向方向r的这种操作波动可在例如约
±
5mm的范围内。这可能不会显著影响传感器112的测量。在一些实施方案中,可提供合适的气泡跟踪程序来检测波动并确定和保持气泡膜与传感器之间的期望的间隔距离d。在一些实施方案中,可通过将传感器安装到线性机动化载物台上来保持期望的间隔距离,该线性机动化载物台可正交于材料表面横穿太赫兹传感器。在一些实施方案中,距离测量传感器可用于确定传感器与膜泡之间的距离,并指示机动化载物台基于所得的距离测量而移动。
41.在一些实施方案中,传感器112可为thz传感器。术语“太赫兹或thz传感器”是指包括发射元件和接收元件的系统,这些元件对标称从0.01thz至10thz的频率范围内的电磁波作出响应。此类系统有连续波和脉冲两种版本,可用于研究材料特性,诸如例如成分、密度和/或厚度。在本文所述的一些实施方案中,使用脉冲时域系统获得感测数据。应当理解,本领域技术人员可认识到,可从频域thz系统或其他合适类型的thz传感器获得类似的信息。示例性thz传感器或系统在美国专利号9,360,296和8,378,304中有所描述,这些专利以引用方式并入本文。
42.图2a为根据一个实施方案的示例性thz传感器200的框图。thz传感器200包括thz脉冲发生器202以从其光学脉冲系统生成太赫兹脉冲并将生成的太赫兹脉冲21朝向待测量的目标材料发射。在一些实施方案中,来自光学脉冲系统的光学脉冲可被分裂以提供任选的探测脉冲203,当检测器204接收到从目标材料反射的太赫兹脉冲时,该探测脉冲可选通thz脉冲检测器204。检测器204可检测反射的太赫兹脉冲23并生成测试信号作为时间的函数。一个示例性thz传感器可从弗吉尼亚州罗阿诺克的luna有限公司(luna inc.(roanoke,va))以商品名terametrix t-gauge tcu5220商购获得。应当理解,除本文所述的实施方案之外,可使用任何合适的thz传感器或其组合。
43.图2b为根据一个实施方案的由thz传感器检测膜泡106的一部分的示意图。太赫兹束21'指向膜泡106。典型的太赫兹束可具有在例如约0.01thz至约10thz范围内的太赫兹频率。太赫兹束21'可很容易传播通过各种聚合物材料系统,包括例如连续材料、多组分材料、填充材料、发泡材料等。
44.太赫兹束21'可被聚焦以具有覆盖具有厚度d的膜泡106的目标区域16的光斑尺寸。可控制太赫兹束21'的光斑尺寸以获得与其他类型的传感器(诸如电容传感器和伽马反向散射传感器)相比更高的有效空间分辨率。在一些实施方案中,太赫兹束21'的光斑尺寸可控制在直径约1mm或面积约1mm2的量级上。在一些实施方案中,太赫兹束21'的光斑尺寸可在例如约0.001mm2至约1000mm2、约0.01mm2至约500mm2、或约0.01mm2至约200mm2、或约0.01mm2至约100mm2的范围内。在一些实施方案中,太赫兹束21'的光斑尺寸可为不大于约
1000mm2、不大于约500mm2、不大于约200mm2、不大于约100mm2或不大于约50mm2。
45.当太赫兹束21'被膜泡106的外表面105(空气/膜界面)反射时,thz传感器通过检测反射脉冲23a可生成信号p1。例如,参见图4c中的正峰p1。当太赫兹束21'被膜泡106的内表面107(空气/膜界面)反射时,thz传感器通过检测反射脉冲23b可生成与信号p1相反符号的信号p2。例如,参见图4c中的负峰p2。可检测并处理反射信号,以确定膜泡106的目标区域16的厚度d。
46.再次参考图1a,传感器110位于模头102的下游和压料辊108a和108b的上游,以测量膜泡106在其周边上的厚度分布。应当理解,可提供多个传感器以测量膜泡106和/或膜106'在各个位置处的厚度分布。可组合来自多个传感器的测量以提供与膜泡106的特性有关的信息。
47.在各种实施方案中,一个或多个thz传感器可位于,例如:a)吹塑膜风环下游和膜泡的霜线上游的位置;b)霜线附近的位置;c)霜线下游和将膜泡压塌到膜中的展平区段上游的位置;d)展平区段处或下游的位置等。
48.在一些实施方案中,thz传感器中的至少一个thz传感器可位于展平区段(例如,压料辊108a至108b)的上游,其可提供与展平区段之后的位置相比缩短的反馈时间。在一些实施方案中,thz传感器中的至少一个thz传感器可位于霜线的下游,其可在霜线下游未发生膜的进一步拉伸时,获得关于最终总膜厚度的数据。
49.在一些实施方案中,系统100可设置有用于对从模头102挤出的箔的宽度和厚度进行闭环控制的控制系统。在一些实施方案中,传感器110可与其他类型的传感器或测量装置组合以测量膜泡106的特性,或吹塑膜挤出工艺中的其他操作参数。这些特性或操作参数可包括例如挤出材料的粘度、膜泡内部的气压、吹向膜泡的冷却空气的温度、模头102中的聚合物熔体的温度等。
50.应当理解,膜泡可具有与不同工艺条件相关联的各种气泡几何形状/特性。例如,美国专利号7,806,676描述了一种用于控制吹塑膜厚度的风环,该风环设置有单独的导热段。在本公开中,传感器110的位置和配置可针对合适的应用而变化。在图3a至图3d的所描绘的实施方案中,一个或多个thz传感器例如相对于相应的霜线7a、7b、7c和7d设置在不同的位置,以测量各种膜泡的厚度分布。
51.如图3a至图3d中所示的气泡几何形状差异可由例如不同材料、挤出速率、气流条件等的任意数量的组合引起。由于thz传感器使用反射信号,因此在一些实施方案中,传感器可定位成沿着正交于气泡表面的方向面向气泡壁并且相对稳定,使得反射的thz信号强且相对稳定。传感器也可安装气泡附近的其他位置,并且可调整传感器的几何形状,以便确保反射的thz光返回到thz接收器。在一些实施方案中,可使用单独的光学感测系统来确定正交于气泡表面的瞬时方向。
52.如图3a所示,thz收发器300a设置在膜泡106a的霜线7a的下游。设置风环107a以调整/控制膜泡106a的几何形状/特性。thz收发器300a可包括束源区段以发射聚焦在膜泡106a的局部区域处的thz束。然后,thz束从局部区域反射出来并返回到收发器300a。thz收发器300a包括检测区段以检测反射束。入射束和反射束在thz收发器300a与膜泡106a的局部区域之间基本上相同的空间中重叠。在一些实施方案中,可在thz收发器300a内部设置分束器以隔开束源区段和束检测区段。
53.如图3b所示,thz收发器300b设置在膜泡106b的霜线7b附近。设置风环107b以调整/控制膜泡106b的几何形状/特性。thz收发器300b可包括束源区段以发射聚焦在膜泡106b的局部区域处的thz束。然后,thz束从局部区域反射出来并返回到收发器300b。thz收发器300b包括检测区段以检测反射束。入射束和反射束在thz收发器300b与膜泡106b的局部区域之间基本上相同的空间中重叠。在一些实施方案中,可在thz收发器300b内部提供分束器以隔开束源区段和束检测区段。
54.如图3c和图3d所示,thz源单元和接收器单元可容纳在单独的模块中,其中不需要分束器。源单元和接收器单元仍一起被称为thz收发器。如图3c所示,与图3a至图3b相比,thz收发器300c设置在膜泡106c的更靠近风环107c的一部分附近。设置风环107c以调整/控制膜泡106c的几何形状/特性。thz收发器300c包括束源区段310c以发射聚焦在膜泡106c的局部区域处的thz束。然后,thz束从局部区域反射出来并返回到thz收发器300c的检测区段320c。入射束和反射束的光路可在thz收发器300c与膜泡106c的局部区域之间基本上相同的空间中基本上不重叠。在许多实施方案中,束源区段310c和检测区段320c包含在机械壳体301c内以保持机械完整性和光学对准。
55.如图3d所示,thz收发器300d设置在膜泡106d的中心部分附近。设置风环107d以调整/控制膜泡106d的几何形状/特性。thz收发器300d包括束源区段310d以发射聚焦在膜泡106d的局部区域处的thz束。然后,thz束从局部区域反射出来并返回到thz收发器300d的检测区段320d。入射束和反射束的光路可在thz收发器300d与膜泡106d的局部区域之间的基本上相同的空间中基本上不重叠。在许多实施方案中,束源区段310d和检测区段320d包含在机械壳体301d内以保持机械完整性和光学对准。
56.本文所述的thz传感器可创建类似于许多距离和范围感测模态的波形,诸如例如雷达、激光雷达、超声波等。图4a示出了通过检测膜泡(例如,图1a的膜泡106)从thz传感器获取的典型原始信号波形。图4b示出了信号的对应于来自膜泡的反射的部分的放大视图。该信号首先运行通过带通滤波器以去除dc偏移并清除一些残余噪声,然后利用与thz传感器相关联的仪器响应函数进行解卷积。所得的解卷积信号示于图4c中。应当理解,本领域已知的任何合适的信号处理手段都可用于处理来自thz传感器的数据。
57.信号的正峰p1对应于thz束的一部分从空气/被测材料界面反射的时间,对于该界面,束从具有较低折射率的介质(空气)传播到具有较高折射率的另一介质(被测材料)。负峰p2对应于thz束的一部分从膜泡/空气界面反射的时间,对于该界面,束从具有较高折射率的介质(被测材料)传播到具有较低折射率的另一介质(空气)。换句话讲,正峰p1由膜泡的面对thz传感器的外表面或前表面产生;而负峰p2由膜泡的背向thz传感器的内表面或后表面产生。波形的时间窗口可能不足以拾取可能从膜泡的另一侧发生的thz束的任何反射。与正峰p1和负峰p2相关联的时间可通过寻峰算法获得。峰p1与峰p2之间的实耗时间表示thz脉冲通过膜泡材料的往返传播时间。还可参见图2b。在此用于确定往返传播时间的波形和峰标志的细节并非旨在为限制性的,因为其他信号处理方法可能会导致波形具有不同的形状。根据等式(1),该往返传播时间t与膜厚度d和膜材料的有效折射率n相关:
58.t=2 n d/c
……
(1)
59.其中c为真空中的光速。使用有效折射率n是因为thz束可包括宽范围的频率(例如,约0.01thz至约10thz),和/或被测材料可包括材料或多个材料层的混合物。有效折射率
n可通过例如取膜材料的样品并通过(i)使用类似(或相同)thz传感器测量通过该样本的往返传播时间以及(ii)使用另一装置(例如,卡尺)测量样品的物理厚度d来校准。
60.图5a示出了p1和p2的峰-时间分布,以及通过膜泡的对应往返传播时间t。图5b示出了通过使用上文的等式(1)计算出的对应于图5a的峰-时间分布的膜厚度分布。当thz传感器围绕膜泡扫描时,该thz传感器收集周边厚度分布。在一些实施方案中,考虑到折射率n可充当膜泡的厚度d的比例增益因子,可由吹塑膜控制系统使用厚度分布数据来使膜泡的厚度分布变平。即使未校准折射率n以产生准确的厚度值,也可以做到这一点。在一些实施方案中,p1和/或p2的峰时间可用于控制从thz传感器到气泡的距离,使得传感器始终位于距气泡的最佳焦距处。在一些实施方案中,p1和/或p2的峰时间可用于控制气泡内部的内部压力,或向气流提供反馈。
61.在一些实施方案中,吹塑膜制造系统(例如,图1a的系统100)的控制系统可将使厚度分布变平的过程与膜厚度的设定值分开。例如,在一些实施方案中,可在压料辊108a至108b处或其下游的位置处测量双层膜106'的膜厚度。可将来自双层膜106'的数据与来自传感器112的数据进行比较。这种比较可用于确定由用于有效折射率n的值和/或与厚度测量相关的两组数据之间的其他偏移引起的偏差误差。
62.在一些实施方案中,来自传感器112的数据可用于控制膜泡厚度。例如,所测量的膜厚度分布可用于调整挤出机速率,调整膜牵引速度等。由于数据在展平区段(例如,压料辊)的上游测量的,因此与从位于展平区段下游的传感器获得的反馈滞后相比,这可提供更短的反馈滞后。
63.提供了各种实施方案,这些实施方案是用于在线测量吹塑膜的感测系统,以及用于在线测量吹塑膜的方法。提供一个或多个太赫兹(thz)传感器以测量从吹塑膜模头挤出的膜泡。应当理解,本文所述的方法和感测系统可用于测量任何合适的膜材料的厚度或其他物理特性,以例如测量流延膜生产线上的材料厚度,测量常规辊到辊膜、泡沫、涂层等。
64.在本公开的示例性实施方案中获取各种意料不到的结果和优点。本公开的示例性实施方案的一个这样的优点是:一个或多个太赫兹(thz)传感器用于测量吹塑膜生产线中的膜泡。thz传感器可在离开膜泡的安全距离处提供具有高空间分辨率的准确厚度测量。
65.本公开的实施方案提供了传感器与膜泡之间的间隔距离,该间隔距离被保持使得可避免膜与传感器之间由于因“呼吸”模式或运输移动引起的膜泡的运动而造成的不期望的接触。相比之下,常规传感器可能会接触到膜泡,从而导致缺陷或膜破裂。
66.本公开的实施方案进一步提供传感器以从膜泡的外表面接近膜泡,从而在膜泡被幅材生产线的展平区段压塌之前测量膜泡。相比之下,常规传感器可能需要接近膜泡的两侧,这通常可能需要在膜泡被幅材生产线的展平区段压塌之后定位传感器。本公开的实施方案的传感器定位在相对更上游的位置处以提供厚度数据,这可减少控制滞后时间。
67.本公开的实施方案可用于广泛多种材料的在线测量,包括例如光学透明材料和光学不透明材料。另外,本公开的实施方案可提供具有高信噪比水平的高空间分辨率,这可有助于生成即时有用的控制信号而无需进行大量的信号平均化。
68.将参照以下实施方案进一步描述本公开的操作。提供这些实施方案以进一步说明各种具体的和优选的实施方案和技术。然而,应当理解,可做出许多变型和修改而仍落在本公开的范围内。
69.示例性实施方案列表
70.应当理解,实施方案1至10以及实施方案11至16中的任一项可组合。
71.实施方案1为一种用于在线测量吹塑膜的感测系统,该感测系统包括:
72.太赫兹(thz)传感器,该thz传感器定位在从吹塑膜模头挤出的膜泡附近;和
73.传感器支撑件,该传感器支撑件被构造为围绕膜泡的周边引导thz传感器。
74.实施方案2为根据实施方案1所述的系统,其中thz传感器被定位成离开膜泡,间隔距离d在约25mm至约150mm的范围内。
75.实施方案3为根据实施方案1或2所述的系统,其中thz传感器被配置为朝向膜泡的目标区域发射thz信号,并从目标区域接收反射信号。
76.实施方案4为根据实施方案3所述的系统,该系统还包括处理器,以处理反射信号,从而确定膜泡的目标区域的厚度。
77.实施方案5为根据实施方案1至4中任一项所述的系统,其中传感器支撑件包括振荡扫描仪轨道。
78.实施方案6为根据实施方案1至5中任一项所述的系统,其中thz传感器包括thz发射器和thz检测器。
79.实施方案7为根据实施方案1至6中任一项所述的系统,其中thz传感器位于:a)吹塑膜风环下游和膜泡的霜线上游的位置;b)霜线附近的位置;c)霜线下游和将膜泡压塌到膜中的展平区段上游的位置;或d)展平区段处或下游的位置。
80.实施方案8为一种吹塑膜生产线,包括根据权利要求1至7中任一项所述的感测系统,其中该感测系统被配置为测量膜泡的厚度分布。
81.实施方案9为根据实施方案8所述的吹塑膜生产线,该吹塑膜生产线还包括外部冷却环,该外部冷却环设置在吹塑膜模头的附近和下游,其中该thz传感器位于外部冷却环的附近和下游。
82.实施方案10为根据实施方案8或9所述的吹塑膜生产线,该吹塑膜生产线还包括展平区段,以将膜泡压塌成双层膜。
83.实施方案11为一种用于吹塑膜在线测量方法,该方法包括:
84.提供太赫兹(thz)传感器,该thz传感器定位在从吹塑膜模头挤出的膜泡附近;
85.经由传感器支撑件围绕膜泡的周边引导thz传感器;以及
86.经由thz传感器测量膜泡的膜厚度分布。
87.实施方案12为根据实施方案11所述的方法,其中thz传感器被定位成离开膜泡,间隔距离d在约25mm至约150mm的范围内。
88.实施方案13为根据实施方案11或12所述的方法,其中该thz传感器被配置为朝向膜泡的目标区域发射thz信号,并从目标区域接收反射信号。
89.实施方案14为根据实施方案13所述的方法,该方法还包括处理反射信号,以确定膜泡的目标区域的厚度。
90.实施方案15为根据实施方案11至14中任一项所述的方法,该方法还包括测量通过压塌膜泡而形成的双层膜的厚度。
91.实施方案16为根据实施方案15所述的方法,该方法还包括将双层膜的厚度与膜泡的膜厚度分布进行比较。
92.实施例
93.这些实施例仅用于说明性目的,并非旨在对所附权利要求的范围进行限制。
94.太赫兹(thz)传感器(可从弗吉尼亚州罗阿诺克的luna有限公司以商品名terametrix t-gauge tcu5220 controller 320/100商购获得)安装在吹塑膜生产线(可从德国伦格里希的windmoeller和hoelscher公司(windmoeller and hoelscher,lengerich,germany)以商品名windmoeller和hoelscher varex吹塑膜生产线商购获得)上的圆形扫描框架(可从瑞士呂蒂的kundig控制系统公司(kundig control systems,ruti,switzerland)以商品名kundig k-ndc rotomat kt 3g商购获得)上,位于现有伽马反向散射(gbs)测量仪旁边的位置,该测量仪在本次测试期间被禁用。圆形扫描框架的直径为约300cm。thz传感器定位成与膜平面的正常操作位置相距约75mm的间隔距离,将束焦点置于预期的膜平面处。从吹塑膜生产线的吹塑膜模头挤出膜泡。聚合物熔体为ldpe(低密度聚乙烯,可从波兰普洛克的巴塞尔奥伦聚烯烃公司(basell orlen polyolefins,plock,poland)以商品名malen“e fabs 23-d006”商购获得)。thz传感器定位在距离吹塑膜模头约600cm处。测量的厚度分布示于图5b中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1