一种转移机械手的制作方法
:
1.本实用新型涉及产品搬运转移领域,特指一种转移机械手。
背景技术:
2.在模内注塑成型生产过程中,成型后的产品一般需要转移至剪水口处进行后续加工,较为传统的产品转移方式通常为人工手动操作。由于注塑过程中产品往往是在高温下成型的,采用人工进行转移产品存在一定的安全隐患。中国专利公开号为:cn326914645u,名称为:一种配合注塑机使用的注塑件转移机械手的专利,其主要公开了一种用于注塑件转移的机械手,包括x向横移装置、y向横移装置、纵向移动装置、回转气缸、90
°
翻转装置及吸盘装置,这类机构成本高,结构复杂,且每次只能一个工位一个工位的转移产品,当产品需要经多次注塑时,采用单个使用效率太低,而采用多个共同使用成本太高,且采用多个这类机构会使整个设备空间庞大,不紧凑。
3.有鉴于此,本发明人提出以下技术方案。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供一种转移机械手。
5.为了解决上述技术问题,本实用新型采用了下述技术方案:一种转移机械手,包括:支撑架、至少两条并列设置于所述支撑架上的滑轨及交错设置于所述支撑架上并能够独立沿所述滑轨移动取料的第一移动夹爪机构、第二移动夹爪机构、第三移动夹爪机构、第四移动夹爪机构,其中,所述第一移动夹爪机构与所述第二移动夹爪机构并列交错分布,所述第二移动夹爪机构与所述第三移动夹爪机构并列交错分布,所述第三移动夹爪机构与所述第四移动夹爪机构并列交错分布。
6.进一步而言,上述技术方案中,所述第一移动夹爪机构包括有安装于所述支撑架上并与所述滑轨平行的第一皮带轮组、以能够滑动的方式安装于所述滑轨上并与所述第一皮带轮组连接的第一夹子及用于驱动所述第一皮带轮组带动所述第一夹子沿所述滑轨运动的第一电机。
7.进一步而言,上述技术方案中,所述第二移动夹爪机构包括有安装于所述支撑架上并与所述第一皮带轮组平行的第二皮带轮组、以能够滑动的方式安装于所述滑轨上并与所述第二皮带轮组连接的第二夹子及用于驱动所述第二皮带轮组带动所述第二夹子沿所述滑轨运动的第二电机。
8.进一步而言,上述技术方案中,所述第三移动夹爪机构包括有安装于所述支撑架上并与所述第二皮带轮组平行的第三皮带轮组、以能够滑动的方式安装于所述滑轨上并与所述第三皮带轮组连接的第三夹子及用于驱动所述第三皮带轮组带动所述第三夹子沿所述滑轨运动的第三电机。
9.进一步而言,上述技术方案中,所述第四移动夹爪机构包括有安装于所述支撑架上并与所述第三皮带轮组平行的第四皮带轮组、以能够滑动的方式安装于所述滑轨上并与
所述第四皮带轮组连接的第四夹子及用于驱动所述第四皮带轮组带动所述第四夹子沿所述滑轨运动的第四电机。
10.进一步而言,上述技术方案中,所述第一皮带轮组、所述第二皮带轮组、所述第三皮带轮组及所述第四皮带轮组均设置于两条所述滑轨之间。
11.进一步而言,上述技术方案中,所述第一皮带轮组与所述第三皮带轮组并列安装于所述支撑架的两侧,所述第二皮带轮组与所述第四皮带轮组并列安装于所述支撑架的两侧,且所述第二皮带轮组位于所述第一皮带轮组和所述第三皮带轮组下方,所述第四皮带轮组位于所述第三皮带轮组下方。
12.进一步而言,上述技术方案中,所述支撑架上至少设置有五个用于感应检测所述第一夹子、所述第二夹子、所述第三夹子及所述第四夹子位置的第一传感器,且所述第一传感器呈等距分布设置。
13.进一步而言,上述技术方案中,所述第一夹子包括有移动安装于所述滑轨上的移动座、设置于所述移动座上并用于与所述第一皮带轮组固定的连接器、安装于所述移动座上的升降气缸、安装于所述升降气缸上并由该升降气缸推动移动的第二支撑架及至少两个安装于所述第二支撑架上并用于抓取治具的夹爪气缸,所述移动座一侧设置有与所述第一传感器匹配对应的感应片;所述第二夹子和所述第三夹子及所述第四夹子的结构均与所述第一夹子结构相同。
14.进一步而言,上述技术方案中,所述支撑架包括有槽板、安装于所述槽板两端的第一端板和第二端板及盖合安装于所述第一端板和所述第二端板上的盖板。
15.采用上述技术方案后,本实用新型与现有技术相比较具有如下有益效果:本实用新型中采用在支撑架上设置独立运动并能够分别夹取带动产品移动的第一移动夹爪机构、第二移动夹爪机构、第三移动夹爪机构、第四移动夹爪机构,并将第一移动夹爪机构、第二移动夹爪机构、第三移动夹爪机构、第四移动夹爪机构采用两两交错分布,以便于它们之间的运动行程具有重合部分,从而实现产品的交接,这种结构布局不仅能够大大节省空间,整体结构更紧凑,而且可实现多工序同步转移,大大提高效率,无需机构等待时间。其次,将第一移动夹爪机构、第二移动夹爪机构、第三移动夹爪机构、第四移动夹爪机构整合安装在支撑架上,方便整个模组拆装,能够适应于各类设备上,提升机构通用性。
附图说明:
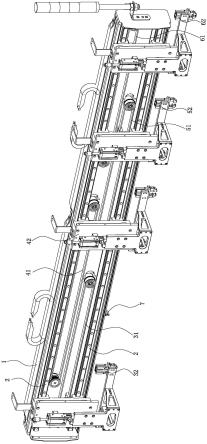
16.图1是本实用新型的立体图;
17.图2是本实用新型的分解图;
18.图3是本实用新型中第一移动夹爪机构的立体图;
19.图4是本实用新型的内部结构图。
具体实施方式:
20.下面结合具体实施例和附图对本实用新型进一步说明。
21.见图1至图4所示,为一种转移机械手,其包括:支撑架1、至少两条并列设置于所述支撑架1上的滑轨2及交错设置于所述支撑架1上并能够独立沿所述滑轨2移动取料的第一移动夹爪机构3、第二移动夹爪机构4、第三移动夹爪机构5、第四移动夹爪机构6,其中,所述
第一移动夹爪机构3与所述第二移动夹爪机构4并列交错分布,所述第二移动夹爪机构4与所述第三移动夹爪机构5并列交错分布,所述第三移动夹爪机构5与所述第四移动夹爪机构6并列交错分布。采用在支撑架1上设置独立运动并能够分别夹取带动产品移动的第一移动夹爪机构3、第二移动夹爪机构4、第三移动夹爪机构5、第四移动夹爪机构6,并将第一移动夹爪机构3、第二移动夹爪机构4、第三移动夹爪机构5、第四移动夹爪机构6采用两两交错分布,以便于它们之间的运动行程具有重合部分,从而实现产品的交接,这种结构布局不仅能够大大节省空间,整体结构更紧凑,而且可实现多工序同步转移,大大提高效率,无需机构等待时间。其次,将第一移动夹爪机构3、第二移动夹爪机构4、第三移动夹爪机构5、第四移动夹爪机构6整合安装在支撑架1上,方便整个模组拆装,能够适应于各类设备上,提升机构通用性。
22.所述第一移动夹爪机构3包括有安装于所述支撑架1上并与所述滑轨2平行的第一皮带轮组31、以能够滑动的方式安装于所述滑轨2上并与所述第一皮带轮组31连接的第一夹子32及用于驱动所述第一皮带轮组31带动所述第一夹子32沿所述滑轨2运动的第一电机33。
23.所述第二移动夹爪机构4包括有安装于所述支撑架1上并与所述第一皮带轮组31平行的第二皮带轮组41、以能够滑动的方式安装于所述滑轨2上并与所述第二皮带轮组41连接的第二夹子42及用于驱动所述第二皮带轮组41带动所述第二夹子42沿所述滑轨2运动的第二电机43。
24.所述第三移动夹爪机构5包括有安装于所述支撑架1上并与所述第二皮带轮组41平行的第三皮带轮组51、以能够滑动的方式安装于所述滑轨2上并与所述第三皮带轮组51连接的第三夹子52及用于驱动所述第三皮带轮组51带动所述第三夹子52沿所述滑轨2运动的第三电机53。
25.所述第四移动夹爪机构6包括有安装于所述支撑架1上并与所述第三皮带轮组51平行的第四皮带轮组61、以能够滑动的方式安装于所述滑轨2上并与所述第四皮带轮组61连接的第四夹子62及用于驱动所述第四皮带轮组61带动所述第四夹子62沿所述滑轨2运动的第四电机63。
26.所述第一皮带轮组31包括有安装于所述第一电机33的输出轴上的第一皮带轮311、以能够转动的方式安装于所述支撑架1并与第一皮带轮311间隔开的第二皮带轮312及套设安装于所述第一皮带轮311与所述第二皮带轮312上的传动皮带313,所述第二皮带轮组41、所述第三皮带轮组51及所述第四皮带轮组61的结构均与所述第一皮带轮组31的结构相同。
27.所述第一皮带轮组31、所述第二皮带轮组41、所述第三皮带轮组51及所述第四皮带轮组61均设置于两条所述滑轨2之间。采用将第一皮带轮组31、第二皮带轮组41、第三皮带轮组51及第四皮带轮组61设置于两条滑轨2之间,使整体结构更加紧凑。
28.所述第一皮带轮组31与所述第三皮带轮组51并列安装于所述支撑架1的两侧,所述第二皮带轮组41与所述第四皮带轮组61并列安装于所述支撑架1的两侧,且所述第二皮带轮组41位于所述第一皮带轮组31和所述第三皮带轮组51下方,所述第四皮带轮组61位于所述第三皮带轮组51下方。
29.所述支撑架1上至少设置有五个用于感应检测所述第一夹子32、所述第二夹子42、
所述第三夹子52及所述第四夹子62位置的第一传感器7,且所述第一传感器7呈等距分布设置。在工作时,由第一传感器7对第一夹子32、第二夹子42、第三夹子52及第四夹子62进行位置定位,使第一夹子32、第二夹子42、第三夹子52及第四夹子62能够准确停留在指定工位,以便于第一夹子32抓取治具后,依次传递给第二夹子42、第三夹子52及第四夹子62,并且通过第一传感器7确定位置能够避免第一夹子32、第二夹子42、第三夹子52及第四夹子62相互撞击,提高机构运行的安全性。
30.所述第一夹子32包括有移动安装于所述滑轨2上的移动座321、设置于所述移动座321上并用于与所述第一皮带轮组31固定的连接器322、安装于所述移动座321上的升降气缸323、安装于所述升降气缸323上并由该升降气缸323推动移动的第二支撑架214及至少两个安装于所述第二支撑架214上并用于抓取治具的夹爪气缸325,所述移动座321一侧设置有与所述第一传感器7匹配对应的感应片326;所述第二夹子42和所述第三夹子52及所述第四夹子62的结构均与所述第一夹子32结构相同。
31.通过在支撑架1上设置两条用于供第一夹子32、第二夹子42、所述第三夹子52及所述第四夹子62移动的滑轨2,以组成型材模组,利用共轨型材模组,结合电机、同步轮、同步带传动的方式,可实现同步或分步移载单个或多个移载取料模组,便于整体设备的安装调试,行程范围内的任意位置均可实现参数设置。
32.所述支撑架1包括有槽板11、安装于所述槽板11两端的第一端板12和第二端板13及盖合安装于所述第一端板12和所述第二端板13上的盖板14。
33.综上所述,本实用新型工作时,由第一皮带轮组31、第二皮带轮组41、第三皮带轮组51及第四皮带轮组61分别独立驱动第一夹子32、第二夹子42、第三夹子52及所述第四夹子62沿滑轨2移动,并由第一传感器7确定第一夹子32、第二夹子42、第三夹子52及所述第四夹子62的位置,以防止第一夹子32、第二夹子42、第三夹子52及所述第四夹子62相互碰撞。通过将第一皮带轮组31、第二皮带轮组41、第三皮带轮组51及第四皮带轮组61采用平行交错分布设置,使得第一夹子32、第二夹子42、第三夹子52及所述第四夹子62的运动行程存在部分重合,以便于传递治具,实现治具的转移。
34.当然,以上所述仅为本实用新型的具体实施例而已,并非来限制本实用新型实施范围,凡依本实用新型申请专利范围所述构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1