一种纤维缠绕系统协调运动优化方法、系统及电子设备
本发明涉及纤维缠绕加工,特别是涉及一种纤维缠绕系统协调运动优化方法、系统及电子设备。
背景技术:
1、传统上,纤维缠绕过程由计算机数控(cnc)机床实现。这些机床已从经典的2轴型式发展到6轴甚至更高的型式,可以实现容器、管道、电线杆等简单形体的纤维缠绕加工。但是,数控式缠绕机床存在诸多不足,如:低端设备自由度少、柔性差、工艺范围较窄、运动惯量较大等。随着复合材料制品的外形复杂化、品种多样化、生产柔性化的发展需求越来越高,这些不足势必导致生成效率低、成本高等问题。
2、工业机器人具有自由度多、工作空间较大、运动部件惯量小、通用性好和可扩展性强等优点,可以实现具有复杂外形模型的高精度自动缠绕成形,有助于纤维缠绕单元的模块化和柔性化,满足大范围小批量的生产任务需求。然而,机器人纤维缠绕过程是一个由机器人关节旋转、芯轴旋转、纤维纱带平移组成的冗余且耦合运动过程。目前的研究方法采用等距离、等高面、等悬纱长度等简单方式生成缠绕路径,未对悬纱长度进行优化,无法使机器人与外部轴的整体运动路径最短;也未对机器人关节运动、外部轴旋转运动以及纤维纱带运动进行综合优化,无法使整个机器人纤维缠绕系统的效率最优。因此,如何进行机器人缠绕系统协调运动优化,是提高机器人纤维缠绕精度和效率的关键,有助于满足大范围与小批量任务的柔性化、多样化、智能化的生产需求。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种纤维缠绕系统协调运动优化方法、系统及电子设备。
2、为实现上述目的,本发明提供了如下方案:
3、一种纤维缠绕系统协调运动优化方法,包括:
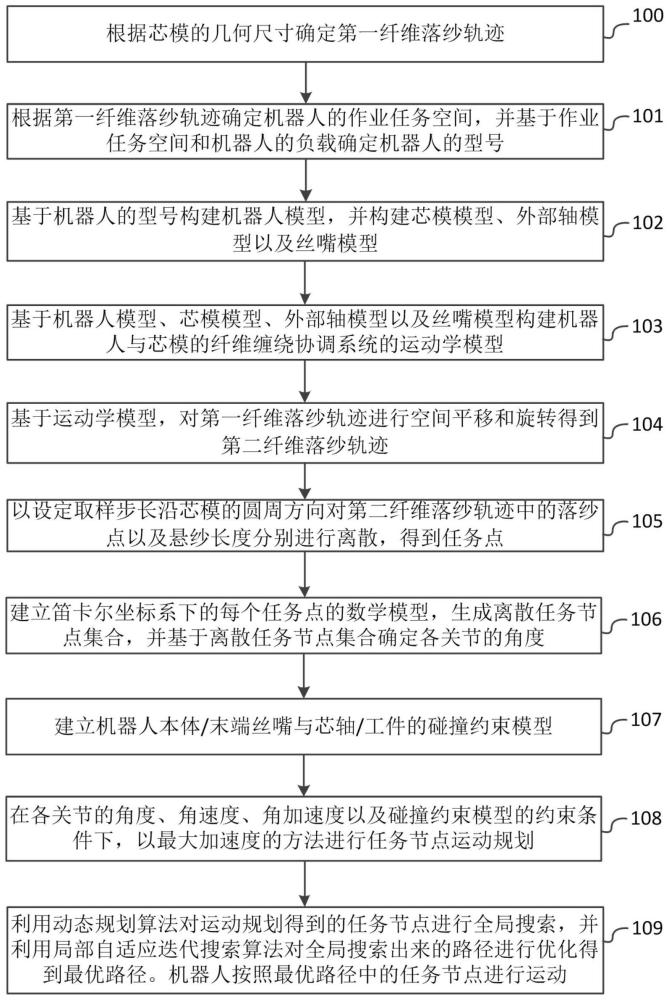
4、根据芯模的几何尺寸确定第一纤维落纱轨迹;
5、根据所述第一纤维落纱轨迹确定机器人的作业任务空间,并基于所述作业任务空间和机器人的负载确定机器人的型号;
6、基于所述机器人的型号构建机器人模型,并构建芯模模型、外部轴模型以及丝嘴模型;
7、基于所述机器人模型、所述芯模模型、所述外部轴模型以及所述丝嘴模型构建机器人与芯模的纤维缠绕协调系统的运动学模型;
8、基于所述运动学模型,对所述第一纤维落纱轨迹进行空间平移和旋转得到第二纤维落纱轨迹;
9、以设定取样步长沿芯模的圆周方向对所述第二纤维落纱轨迹中的落纱点以及悬纱长度分别进行离散,得到任务点;
10、建立笛卡尔坐标系下的每个任务点的数学模型,生成离散任务节点集合,并基于所述离散任务节点集合确定各关节的角度;
11、建立机器人本体/末端丝嘴与芯轴/工件的碰撞约束模型;
12、在各关节的角度、角速度、角加速度以及所述碰撞约束模型的约束条件下,以最大加速度的方法进行任务节点运动规划;
13、利用动态规划算法对运动规划得到的任务节点进行全局搜索,并利用局部自适应迭代搜索算法对全局搜索出来的路径进行优化得到最优路径;机器人按照所述最优路径中的任务节点进行运动。
14、可选地,根据芯模的几何尺寸确定第一纤维落纱轨迹,具体包括:
15、根据芯模的几何尺寸利用非测地线方程和中心转角方程,通过四阶龙格库塔法求解第一纤维落纱轨迹。
16、可选地,基于所述机器人的型号构建机器人模型,具体包括:
17、采用solidworks软件,基于所述机器人的型号对机器人进行三维建模得到机器人模型。
18、可选地,采用solidworks软件构建所述芯模模型、所述外部轴模型以及所述丝嘴模型。
19、可选地,基于所述机器人模型、所述芯模模型、所述外部轴模型以及所述丝嘴模型构建机器人与芯模的纤维缠绕协调系统的运动学模型,具体包括:
20、将所述机器人模型、所述芯模模型、所述外部轴模型以及所述丝嘴模型转换为urdf格式文件;
21、将所述urdf格式文件导入matlab软件中,构建所述机器人与芯模的纤维缠绕协调系统的运动学模型。
22、可选地,以设定取样步长沿芯模的圆周方向对所述第二纤维落纱轨迹中的落纱点以及悬纱长度分别进行离散,得到任务点,具体包括:
23、根据线型参数中落纱点轨迹沿芯模的圆周方向和悬纱长度同时离散生成多层次有向图;
24、基于多层次有向图的离散表达方法以设定取样步长得到任务点。
25、根据本发明提供的具体实施例,本发明公开了以下技术效果:
26、本发明根据芯模的几何尺寸生成纤维落纱轨迹,利用纤维落纱轨迹确定机器人的作业任务空间进而得到机器人型号;进行三维几何建模,并基于三维几何建模得到的芯模模型、机器人模型、外部轴模型、丝嘴模型建立机器人与芯模的纤维缠绕协调系统的运动学模型;针对纤维落纱轨迹中的落纱点和悬纱长度进行运动空间离散化得到任务点;在各关节的角度、角速度、角加速度以及碰撞约束模型的约束条件下,以最大加速度的方法进行任务节点运动规划,基于运动规划得到的任务节点确定最优路径,以实现纤维缠绕系统的协调运动优化,提高机器人纤维缠绕精度和效率。
27、进一步,本发明提供了一种纤维缠绕系统协调运动优化系统,所述系统用于实施上述提供的纤维缠绕系统协调运动优化方法;所述系统包括:
28、第一落纱轨迹确定模块,用于根据芯模的几何尺寸确定第一纤维落纱轨迹;
29、机器人型号确定模块,用于根据所述第一纤维落纱轨迹确定机器人的作业任务空间,并基于所述作业任务空间和机器人的负载确定机器人的型号;
30、模型构建模块,用于基于所述机器人的型号构建机器人模型,并构建芯模模型、外部轴模型以及丝嘴模型;
31、运动学模型构建模块,用于基于所述机器人模型、所述芯模模型、所述外部轴模型以及所述丝嘴模型构建机器人与芯模的纤维缠绕协调系统的运动学模型;
32、第二落纱轨迹确定模块,用于基于所述运动学模型,对所述第一纤维落纱轨迹进行空间平移和旋转得到第二纤维落纱轨迹;
33、任务点离散处理模块,用于以设定取样步长沿芯模的圆周方向对所述第二纤维落纱轨迹中的落纱点以及悬纱长度分别进行离散,得到任务点;
34、关节角度确定模块,用于建立笛卡尔坐标系下的每个任务点的数学模型,生成离散任务节点集合,并基于所述离散任务节点集合确定各关节的角度;
35、碰撞约束模型构建模块,用于建立机器人本体/末端丝嘴与芯轴/工件的碰撞约束模型;
36、任务节点规划模块,用于在各关节的角度、角速度、角加速度以及所述碰撞约束模型的约束条件下,以最大加速度的方法进行任务节点运动规划;
37、最优路径确定模块,用于利用动态规划算法对运动规划得到的任务节点进行全局搜索,并利用局部自适应迭代搜索算法对全局搜索出来的路径进行优化得到最优路径;机器人按照所述最优路径中的任务节点进行运动。
38、再进一步,本发明还提供了一种电子设备,该电子设备包括:
39、存储器,用于存储计算机程序;所述计算机程序用于实施上述提供的纤维缠绕系统协调运动优化方法;
40、处理器,与所述存储器连接,用于调取并执行所述计算机程序。
41、因本发明提供的系统和电子设备实现的技术效果与本发明提供的纤维缠绕系统协调运动优化方法实现的技术效果相同,故在此不再进行赘述。
- 还没有人留言评论。精彩留言会获得点赞!