一种洁具清洗装置和清洗方法与流程
1.本发明涉及一种清洗装置和清洗方法,尤其是能够根据被清洗物体形状自适应地进行清洗的装置和方法。
背景技术:
2.各种表面清洗机械有很多,例如自动洗车机、自动洗碗机、建筑物外墙清洗机。这些机械在进行清洗时,要么是需要人来进行操作,例如建筑物外墙清洗机需要由人确定要清洗的位置和控制清洗的过程;要么是对被清洗物体不加区分地进行清洗,例如自动洗碗机;要么虽然能够感知被清洗物体的大致范围但不能进行细致的清洗,例如自动洗车机。而像刷牙这样的清洗过程,只能够由人手动地完成。
3.这些清洗方法和装置不能实现全自动、完全无人操作,不是很方便。
技术实现要素:
4.本发明的目的是提供一种能够自动清洗物体的装置和方法,能够根据物体的三维形态/结构自适应地对物体进行清洗,特别的,能够根据物体的三维表面形态对物体表面进行清洗。
5.本发明的清洗装置包括至少一特征信息获取模块,能够获取物体的特征信息,特征信息包括物体的三维形态信息、三维表面形状信息、材质信息。特征信息获取模块包括至少一三维测量模块,三维测量模块能够测量物体表面的三维形态和材质。三维测量模块的测量方式包括但不限于三维激光扫描测量、结构光测量、双目立体视觉测量、tof测量、超声波测量和其它公知的三维形态测量方式。清洗装置包括至少一清洗方案生成模块,能够根据物体的特征信息和设备信息生成物体的清洗方案。清洗方案包括采用哪些清洗操作、待清洗物体表面区块的划分方式、表面区块清洗的先后次序、清洗装置在物体表面运动的三维路线。清洗装置包括至少一清洗控制模块和至少一清洗执行模块。清洗控制模块能够记录存储清洗方案。清洗执行模块包括至少一溶剂/水喷洒子模块,至少一清洗剂喷洒子模块,至少一擦刷子模块,至少一吸集子模块,至少一刮擦子模块。清洗控制模块能够根据清洗方案控制清洗执行模块对表面区块实施所选择的清洗操作。擦刷子模块包括至少一刷子或擦拭机构,能够对物体表面进行刷洗或擦拭。吸集子模块包括至少一负压污水/污物回收模块,能够利用负压吸取污水/污物。吸集子模块包括至少一吸收模块,能够利用毛细作用,例如织物或海绵吸取污水/污物。刮擦子模块包括至少一刮擦机构,例如刮水板,能够刮除污水/污物,尤其是玻璃等光滑平整表面的污物。清洗执行模块包括公知必要的伺服机构、驱动机构,能够带动各子模块在物体表面运动,完成清洗操作。清洗方案包括清洗执行模块的各子模块沿物体三维表面移动的三维路径。清洗执行模块的各子模块能够保持设定的距离沿物体三维表面移动。清洗装置包括至少一定位模块,能够确定清洗装置与待清洗物体之间的相对位置关系,并能够实时测量清洗装置与表面区块之间的相对位置。清洗装置包括至少一行走模块,能够带动清洗装置在物体表面移动,使清洗执行模块移动到待清洗表
面区块处。包括至少一翻移机构,能够改变物体和清洗装置之间的相对位置,使待清洗表面区块移动到清洗执行模块处。清洗装置包括至少一固定机构,能够把清洗装置固定在物体表面或物体附近,能够保持清洗装置与物体间空间位置关系恒定。
6.本发明的清洗方法包括获取被清洗物体特征信息步骤,清洗机械能够从服务器/上位机获取被清洗物体的特征信息,或者能够对物体实施三维测量以获取物体的特征信息。获取被清洗物体特征信息步骤包括三维测量步骤。包括清洗方案生成步骤,能够根据物体的特征信息和设备信息生成清洗方案。包括清洗方案获取步骤,清洗装置能够从服务器/上位机获取清洗方案。包括清洗方案存储步骤,清洗控制模块能够把从服务器/上位机/清洗方案生成模块处获得的清洗方案存储在清洗控制模块中。包括定位步骤,定位模块能够确定清洗装置与待清洗物体之间的相对位置关系,清洗控制模块能够确定清洗执行模块与待清洗表面区块之间的位置关系。包括清洗步骤,清洗控制模块能够根据清洗方案控制清洗执行模块对物体表面实施清洗操作。包括固定步骤,固定模块固定清洗装置与待清洗物体之间的相对位置,保持相对位置恒定。
7.本发明的清洗装置和清洗方法能够根据物体的三维形状、材质对物体实施自动、智能清洗,提高了清洗的效率,改善了清洗的效果。
附图说明
8.图1是表面区块示意图;图2是本发明的清洗装置一个实施例的结构框图;图3是本发明的清洗方法一个实施例的流程图;图4是本发明的清洗方法一个实施例的流程图;图5是本发明清洗装置的另一实施例的结构框图;图6是本发明的清洗方法一个实施例的流程图;图7是本发明的清洗方法一个实施例的流程图;图8是本发明的清洗方法一个实施例的流程图;图9是本发明的清洗方法一个实施例的流程图;图10是本发明的清洗方法一个实施例的流程图;图11是本发明的清洗装置清洗汽车的方法流程图;图12是本发明的清洗装置清洗器皿的方法流程图;图13是本发明的清洗装置清洗建筑物的方法流程图;图14是本发明的清洗装置的一个实施例的结构框图;图15是图14的清洗装置清洗牙齿的方法流程图;图16是本发明的清洗装置的一个实施例的结构框图;图17是图16的清洗装置清洗物体的方法流程图;图18是图16的清洗装置清洗物体的方法流程图。
具体实施方式
9.图1中,表面区块是在物体的三维表面上划分出的一块区域,物体表面能够被划分成至少一个表面区块。表面区块201、202为物体2表面的两个表面区块。表面区块所在区域
的三维形态信息、空间位置信息、范围信息、材质信息、清洗注意事项等能够被测量或已知。表面区块能够有编号。根据编号或空间位置信息能够定位表面区块。一个物体表面至少划分为一个表面区块。物体表面有多个表面区块时,各个表面区块能够被遍历。遍历的顺序能够被记录在清洗方案中。
10.图2中,清洗装置1包括至少一特征信息获取模块11,至少一清洗方案生成模块13,至少一清洗控制模块14,至少一清洗执行模块15和必要的公知组成部分,包括但不限于机架、壳体、网络连接模块、动力模块、伺服模块、信号传输线路、电线、液体管路、气体管路等。特征信息获取模块能够从互联网服务器或上位机处获取要清洗物体的特征信息,特征信息包括但不限于物体的三维结构信息、三维表面形态信息、材质信息、不同材质的洗涤注意事项、物体空间位置信息、表面区块划分信息等。在需要清洗的物体上布置有图形码,特征信息获取模块能够通过扫描图形码连接网络并从服务器/上位机处下载要清洗物体的特征信息。图形码包括但不限于二维码、条形码或其它编码,图形码中包括有要清洗物体的特征信息的下载地址。特征信息获取模块包括至少一扫码模块,能够扫描物体上的图形码,获取物体的特征信息。特征信息获取模块包括至少一网络连接模块,能够连接网络或上位机,根据下载地址从服务器或上位机处获取该物体的特征信息,并传递给清洁方案生成模块。清洁方案生成模块能够根据要清洗物体的特征信息、清洁装置的设备信息,包括但不限于清洗执行模块的机械结构特征尺寸等信息生成该物体的清洗方案。清洗方案包括但不限于待清洗物体三维表面的表面区块划分方式、表面区块的三维形态、表面区块的空间位置、表面区块的范围、不同表面区块的清洗顺序、表面区块的清洗流程和步骤、清洁程度检测标准、清洗执行模块在表面区块上的三维移动路线信息和控制信息、清洗执行模块沿表面区块的三维表面移动的三维路径、清洗操作控制信息等。清洗方案被传递给清洗控制模块。清洗控制模块能够根据清洗方案控制清洗执行模块沿表面区块的三维表面在三维空间移动。清洗控制模块能够根据清洗方案控制清洗执行模块移动到指定的表面区块,控制清洗执行模块对该表面区块实施清洗操作。清洗控制模块能够根据清洗方案控制清洗执行模块完成对所有表面区块的清洗。
11.清洗装置包括至少一行走模块,行走模块能够带动清洗装置在物体表面移动。行走模块包括至少一吸附子模块,吸附子模块能够使清洗装置吸附在物体表面而不掉落。清洗装置1包括至少一定位模块19,定位模块能够确定清洗装置与待清洗物体之间的相对空间位置关系,进而能够确定清洗执行模块与待清洗物体之间的相对空间位置关系,进而能够确定清洗执行模块与待清洗物体的任一表面区块之间的空间位置关系。定位模块包括至少一基准点a,清洗执行模块包括至少一基准点b,基准点a与基准点b的相对空间位置能够通过两个基准点之间的机械结构的三维尺寸计算得到。当清洗执行模块移动时,基准点a和b的相对位置发生变化,清洗控制模块能够实时计算出两个基准点之间的相对空间位置。待清洗物体包括至少一基准点c,待清洗物体的表面区块包括至少一基准点d,任一表面区块的基准点d与基准点c之间的位置关系已知。定位模块能够确定基准点a和基准点c之间的相对空间位置关系,进而能够确定基准点b与基准点d之间的位置关系,能够确定清洗执行模块与任一表面区块之间的相对位置。定位模块包括至少一卫星定位模块,能够实时确定基准点a的三维空间位置。基准点c的空间位置能够被测量或已知,进而能够得到基准点a和基准点c之间的相对位置关系。定位模块包括至少一激光测距测角模块,能测量基准点a和基
准点c之间的距离和角度,进而确定基准点a和基准点c之间的位置关系。定位模块包括至少一贯性导航模块,初始时,确定基准点a和基准点c的位置关系。当清洗装置和/或清洗执行模块运动时,贯性导航装置能够实时测量清洗装置/清洗执行模块的运动轨迹,能够实时确定清洗执行模块与表面区块之间的位置关系。
12.清洗执行模块包括至少一喷洒模块,能够向物体表面喷洒水或溶剂。包括至少一清洗剂喷洒模块,能够向物体表面喷洒清洗剂/洗涤剂/表面活性剂。包括至少一刷擦模块,刷擦模块包括至少一刷子或清洁擦,能够刷洗或擦拭物体表面。包括至少一吸集回收模块,能够通过负压吸集或吸收体吸收的方式回收污水或溶剂。清洗方案中包括清洗执行模块的喷洒模块/清洗剂喷洒模块根据表面区块的三维表面形状、范围、空间位置信息而喷洒水/溶剂/洗涤剂/表面活性剂的位置、范围、喷射角度、顺序、时间、力度、用量的信息。清洗控制模块能够根据清洗方案控制喷洒模块/清洁剂喷洒模块在表面区块上喷洒水/溶剂/清洁剂/表面活性剂。清洗控制模块能够根据清洗方案控制刷擦模块根据表面区块的三维表面形状贴合在表面区块的表面上,对表面进行刷擦操作。清洗控制模块能够根据清洗方案控制吸集回收模块能够根据物体三维表面形状贴合在表面区块的表面上,完成吸集回收操作。
13.清洗控制模块能够从定位模块获取定位信息。清洗控制模块能够存储清洗方案。当清洗多件同样的物品时,只需要确定待清洗的物品的基准点c和基准点a的位置关系,清洗控制模块能够根据存储的清洗方案对物品进行清洗,而不用重新获取待清洗物体的特征信息和/或重新生成清洗方案,即同样的物体的清洗方案能够是相同的。当清洗装置1被固定地布置在待清洗物体上/附近时,清洗装置与待清洗物体之间的位置保持固定,清洗控制模块能够直接根据存储的清洗方案对物品进行清洗,而不需要重新确定待清洗物体和清洗装置之间的位置关系。
14.清洗方案生成模块能够布置在服务器/上位机中,在服务器/上位机中生成清洗方案后下载到清洗控制模块中。清洗方案包括清洗步骤,清洗步骤包括但不限于水/溶剂的喷洒时间、喷洒量、力度、范围,清洗剂的喷洒时间、喷洒量、范围,刷擦机构/组件的擦拭时间、擦拭方式、力度、范围,吸集回收模块吸取污物的时机、吸取方式,烘干/吹干操作的时间、温度等,以及各清洗操作之间的先后次序等。清洗方案包括不同表面区块的清洁顺序。清洗方案包括同一个表面区块的清洗步骤。清洗方案包括同一个清洗步骤在不同表面区块实施的顺序。
15.图3中,步骤306,清洗装置的特征信息获取模块获取被清洗物体的特征信息。获取方式能够是清洗装置扫描待清洗物品的图像码后从服务器下载特征信息。特征信息被传递给清洗方案生成模块,在步骤400,清洗方案生成模块能够根据特征信息和清洗装置的自身设备信息生成清洗方案。清洗方案被传递给清洗控制模块,在步骤500,清洗控制模块能够根据清洗方案控制清洗执行模块实施清洗操作。清洗控制模块根据清洗执行模块和待清洗表面区块之间的相对位置关系,控制清洗执行模块运动,移动清洗执行模块到待清洗表面区块所在的位置,清洗执行模块依据清洗方案实施清洗操作,清洗表面区块。
16.图4中,清洗装置的清洗控制模块中存储有待清洗物体的清洗方案并能够被读取,或者能够从服务器/上位机获取清洗方案。清洗装置能够被固定地布置在待清洗物体上/附近,清洗装置基准点a与待清洗物体基准点c的相对位置能够保持不变。清洗物体时,在步骤
300,固定清洗装置与待清洗物体之间的相对位置关系。位置固定后,清洗控制模块能够实时计算出清洗执行模块与待清洗表面区块之间的相对位置。在步骤405,清洗控制模块能够读取存储的清洗方案或者从服务器/上位机获取清洗方案。在步骤500,清洗控制模块根据清洗方案控制清洗执行模块实施清洗操作,清洗表面区块。步骤300能够被放在步骤405后。
17.图5中,清洗装置1包括至少一信息上传模块17。信息上传模块能够把清洗装置的信息和/或待清洗物体的信息上传到服务器和/或上位机中。服务器和/或上位机中包括至少一清洗方案生成模块,能够根据这些信息生成清洗方案。信息上传模块获取待清洗物体的信息的方法能够是扫描待清洗物体的图形码,并把图形码信息上传到服务器和/或上位机。信息上传模块上传的清洗装置的信息包括但不限于清洗装置的型号、设备状态、设备特征尺寸、位置信息等。清洗装置包括至少一清洗方案获取模块13,该模块能够从服务器或上位机处获得/下载清洗方案。清洗装置包括至少一清洗控制模块14和至少一清洗执行模块15,清洗控制模块能够操纵清洗执行模块完成对待清洗物体的清洗过程。清洗装置包括至少一定我模块19,能够确定清洗装置的空间位置、清洗装置与待清洗物体之间的相对位置。
18.图6中,把清洗装置布置在物体上或附近。清洗装置的位置能够相对于物体改变。在步骤302,定位模块确定清洗装置的空间位置。步骤307,清洗装置向服务器/上位机上传清洗装置的设备信息、位置信息。服务器/上位机中存储有待清洗物体的特征信息。上传的方式能够是清洗装置扫描物体表面的图形码,获取上传地址后向服务器/上位机上传设备信息。图形码中包括了物体的信息,服务器能够从上传的地址中识别出地址来自于哪个图形码,从而确定要清洗的物体,并从数据库中获得该物体的特征信息。服务器/上位机根据物体的特征信息和设备信息/位置信息生成清洗方案。步骤406,清洗装置获取清洗方案并存储在清洗控制模块中。步骤500,根据清洗方案实施清洗操作。
19.图7中,步骤306,清洗装置获取被清洗物体的特征信息。步骤407,清洗装置能够根据特征信息和设备信息生成清洗方案,或者能够从服务器/上位机获取清洗方案。确定清洗装置和待清洗物体之间的位置关系。步骤521,清洗装置选择一个待清洗表面区块。步骤523,清洗装置确定清洗执行模块与待清洗表面区块之间的位置关系。步骤525,清洗装置移动到待清洗表面区块,移动清洗执行模块到待清洗表面区块,清洗执行模块清洗该表面区块。完成该表面区块的清洗操作后,步骤538,判断是否还有待清洗表面区块,如果有,则跳转到步骤521;如果没有,则进入步骤540,结束清洗过程。图7的清洗方法适合至少有两个表面区块的物体,在完成了一个表面区块的清洗操作后进行后一个表面区块的清洗操作,直至完成所有区块的清洗。步骤525中能够包括多种清洗操作,即在步骤525中清洗表面区块的过程能够包括在该表面区块的清洗过程中实施多种清洗操作。
20.清洗一些物体时,例如汽车、陶瓷容器,清洗过程通常是先在物体表面喷洒水,去除物体表面的泥土或其它污物。这一操作是对物体所有表面实施的。当物体表面被划分为多个表面区块时,每个表面区块都被实施了喷水这一清洗操作。然后在物体表面的喷洒清洁剂,即每个表面区块都被实施喷洒清洁剂这一清洗操作。接下来是刷洗物体表面,即依次刷洗每个表面区块。然后重新在物体表面喷水,即重新嘴每个表面区块喷水。最后擦拭物体表面,即依次擦洗每个表面区块。清洗操作包括但不限于向物体表面喷洒水/溶剂、喷洒清洗剂/表面活性剂、刷洗物体表面、吸取物体表面污水/溶剂、擦拭物体表面、刮擦物体表面。
21.图8中,步骤306,清洗装置获取被清洗物体的特征信息,特征信息包括物体表面的
三维形态、材质。步骤409,清洗装置根据特征信息生成清洗方案。在步骤520,清洗装置选择一清洗操作。在步骤521,清洗装置选择一个待清洗的表面区块。步骤523,确定清洗执行模块与待清洗表面区块之间的位置关系。步骤525,移动清洗执行模块到待清洗表面区块,实施所选清洗操作,清洗该表面区块。清洗表面区块时,清洗执行装置能够根据表面区块的三维表面形态沿物体表面移动,其中物体表面的三维表面形态被包括在清洗方案中。清洗方案能够包括待清洗表面区块的三维空间位置和三维表面形态。清洗执行模块能够移动到待清洗表面区块位置处,清洗执行模块能够沿区块三维表面移动,清洗执行模块能够贴合待清洗区块的三维表面或保持与三维表面在设定的距离范围内移动和实施清洗操作。在步骤538,判断是否每一个表面区块都被实施了在步骤520所选择的清洗操作,即判断是否还有待清洗区块。如果是,则返回步骤521;如果否,则进入步骤539。在步骤539,判断接下来是否还有其它清洗操作。如果是,则返回步骤520,选择下一个清洗操作;如果否则进入步骤540,结束清洗。
22.对于一些物体的清洗,例如清洗建筑物外墙,通常是在建筑物的一个表面区块上先喷水,然后喷洒清洗剂,接下来擦拭该表面区块,然后再喷水冲洗,最后擦拭表面区块,完成该表面区块的清洗。接下来选择另一个表面区块,重复上述过程,直到把建筑物表面清洁完毕。
23.在图9中,在步骤306,清洗装置获取被清洗物体的特征信息。步骤407,清洗装置从服务器获取或者生成清洗方案。步骤521,清洗装置选择一待清洗的表面区块。步骤523,确定清洗执行模块与待清洗表面区块之间的位置关系。步骤525,移动清洗执行模块到待清洗表面区块。步骤520,清洗装置选择一清洗操作,对该表面区块实施所选定的清洗操作。步骤539,判断在步骤521所选定的表面区块是否还有其它清洗操作。如果是,则返回步骤520,选择下一个清洗操作并实施;如果否,则进入步骤538。在步骤538,判断是否还有待清洗表面区块,如果有,则返回步骤521,选择下一个待清洗表面区块;如果否,则进入步骤540,结束清洗。其中步骤306能够省略。该方法还能够包括一确定清洗装置和物体间相互位置关系的步骤,该步骤能够被放置在确定清洗执行模块与待清洗表面区块之间位置关系步骤之前的任何位置。
24.图10中,选择清洗操作的步骤520在选择表面区块的步骤521之后、步骤523之前。步骤525,移动清洗执行模块到待清洗表面区块,实施所选清洗操作。
25.图11是用本发明的清洗装置清洗汽车的方法。步骤306,清洗装置获取汽车的特征信息,包括三维形状信息和/或材质信息。获取方式能够是从服务器下载,或通过三维测量方式获得。在步骤407,清洗装置生成汽车的清洗方案,或者从服务器获取汽车的清洗方案。汽车清洗方案包括汽车表面的三维形态和材质。清洗方案能够把汽车表面划分为多个表面区块,例如顶棚、前车窗、左前门、右后门、大灯。清洗方案能够包括这些表面区块的三维空间位置和表面三维形态。清洗方案包括清洗操作的组合、表面区块的清洗顺序、清洗执行模块及子模块的空间运动轨迹。接下来,清洗装置按照清洗方案对汽车实施清洗。步骤520,清洗装置选择一清洗操作,例如喷水冲洗汽车表面。在步骤521,清洗装置选择一个待清洗的表面区块,例如汽车顶棚。步骤523,清洗控制模块确定清洗执行模块与待清洗表面区块之间的位置关系,例如确定喷水喷头与汽车顶棚的位置关系。步骤525,移动清洗执行模块到待清洗表面区块,实施所选清洗操作。移动清洗执行模块到待清洗表面区块步骤包括移动
清洗执行模块的子模块到待清洗表面区块附近,包括清洗执行模块的子模块与区块的表面接触和/或保持设定距离,包括清洗执行模块所释放出的溶剂/清洁剂能够到达待清洗表面区块。例如移动喷水喷头到汽车顶棚附近,控制喷水喷头按照清洗方案中设定的三维移动路线沿顶棚表面移动,并遍历整个顶棚,对顶棚实施冲水操作。步骤538,判断是否还有待清洗区块。如果是,则返回步骤521,选择下一个待清洗的表面区块,例如选择汽车前车窗;如果否,即汽车的所有表面区块都完成了所选的清洗操作,例如汽车所有表面都完成了冲水操作,则进入步骤539。在步骤539,判断是否还有其它清洗操作。如果是,则返回步骤520,例如还有喷洒清洗剂操作;如果否,则进入步骤540,结束对汽车的清洗。清洗装置能够是固定在地面上的,当汽车停靠在清洗装置附近后,清洗装置的定位模块确定清洗装置和汽车的位置关系,进而确定清洗执行模块与汽车的位置关系。根据该位置关系能够生成清洗方案,清洗方案中包括了清洗执行模块在三维空间的运动轨迹,使清洗执行模块能够沿汽车表面移动完成清洗操作。清洗执行模块包括伺服机构,伺服机构能够带动各子模块在三维空间移动。
26.清洗装置包括至少一行走模块,行走模块能够带动清洗装置在物体表面移动。行走模块的行走方式能够是滚动式,能够是步行式。行走模块包括至少一吸附模块,吸附模块能够使清洗装置吸附在物体表面。吸附模块的吸附方式能够是负压吸附和/或电磁吸附和/或磁力吸附。清洗装置能够被布置在汽车上,通过吸附模块吸附在汽车表面,优选地采用负压吸附方式。行走模块能够带动清洗装置在汽车表面移动,清洗不同的表面区块。初始时,定位模块确定清洗装置与汽车上定位点/坐标原点之间的相对位置关系,根据该位置关系生成清洗方案。清洗控制模块能够确定清洗执行模块与汽车各表面区块之间的位置关系,进而确定清洗执行模块在汽车表面的移动路线。
27.清洗装置包括至少一夹持机构,能够夹持住物体并把物体固定在清洗装置中。清洗装置包括至少一物体翻移机构,能够翻转/转动/移动物体,改变物体的三维空间位置,使待清洗的表面区块移动到清洗执行模块附近。图12 是本发明的清洗装置清洗器皿的方法。器皿包括但不限于各种玻璃、陶瓷、塑料、橡胶、金属等制成的碗盘、花瓶、容器、工具等。器皿能够被放入到清洗装置中。夹持机构夹持住器皿。定位模块能够确定器皿与清洗执行装置之间的位置关系。在步骤306,清洗装置获取器皿的特征信息。获取的方式能够是扫描物体上的图形码然后从服务器获取该器皿的特征信息。还能够是拍摄物体的图像,通过图像识别辨识出物体然后从服务器获取特征信息。还能够是通过三维测量方式获取物体的特征信息,包括通过三维测量获取物体的三维尺寸,通过图像分析获取物体的材质。步骤407,清洗装置根据器皿的特征信息和清洗装置的设备信息生成器皿的清洗方案。或者清洗装置把自身的设备信息和物体特征信息上传到服务器,由服务器生成清洗方案并被传递给清洗装置。清洗控制模块能够存储清洗方案。步骤520,选择一清洗操作,例如喷洒清洗剂。步骤521,选择一待清洗表面区块,例如盘子的上表面。步骤523,确定清洗执行模块与待清洗表面区块之间的位置关系。例如确定清洗剂喷洒喷头与盘子上表面之间的位置关系。翻移机构能够翻转移动器皿,使器皿的待清洗表面区块移动到清洗执行模块附近。步骤525,移动器皿和/或清洗执行模块,使待清洗表面区块到清洗执行模块位置处,实施该清洗操作。例如移动盘子上表面到清洗剂喷洒喷头附近,向盘子上表面喷洒清洗剂。移动物体和/或移动清洗执行模块都能够实现把待清洗表面区块移动到清洗执行模块位置处的效果。步骤538,
判断是否还有待清洗区块,如果是,则跳转到步骤521。例如还有盘子的下表面需要喷洒清洗剂,则选择盘子的下表面实施喷洒清洗剂操作。如果否,则说明所有表面区块都完成了该清洗操作,进入步骤539。在步骤539,判断是否还有其它清洗操作,如果是,则跳转到步骤520。例如在盘子上完成了喷洒清洗剂操作后,还需要进行刷洗盘子的操作,则接下来选择刷洗盘子的操作。如果否,则结束清洗。其中步骤306能够省略。该方法还能够包括一确定清洗装置和物体间相互位置关系的步骤,该步骤能够被放置在确定清洗执行模块与待清洗表面区块之间位置关系步骤之前的任何位置。
28.图13是用本发明的清洗装置清洗建筑物外表面的方法。清洗建筑物时,通常的清洗方法是选择建筑物的一块区域,完成喷水、喷清洗剂、擦刷、再喷水、刮除水等清洗操作之后,再选择下一块区域,重复上述清洗过程。步骤306,清洗装置获取建筑物的特征信息。获取方式包括通过输入建筑物名称从服务器下载。获取方式包括通过三维激光扫描方法获取建筑物的三维表面尺寸,通过图像识别获取建筑物表面的材质信息。步骤407,获取/生成清洗方案。清洗装置能够根据建筑物的特征信息和设备信息生成清洗方案,也能够把设备信息上传到服务器,由服务器生成清洗方案后传递给清洗装置。如果从服务器获取清洁方案,则步骤306能够省略。步骤521,选择一个待清洗的表面区块。例如建筑物的一块玻璃窗。步骤523,确定清洗执行模块与待清洗表面区块之间的位置关系。步骤525,移动清洗装置到待清洗表面区块,移动清洗执行模块到待清洗表面区块。步骤520,选择一清洗操作,例如喷水。步骤533,执行所选清洗操作,例如向玻璃喷水。步骤539,判断是否还有其它清洗操作,如果是,则跳转到步骤520。例如喷水之后还有喷洒清洗剂操作。如果否,则跳转到步骤538,判断是否还有待清洗区块。如果是,则跳转到步骤521,选择下一个表面区块。如果否,则跳转到步骤540,结束清洗。该方法还能够包括一确定清洗装置和建筑物之间相互位置关系的步骤,该步骤能够被放置在确定清洗执行模块与待清洗表面区块之间位置关系步骤之前的任何位置。清洗执行模块包括至少一刮擦子模块,能够刮除物体表面的水或溶剂。
29.图14中,清洗装置1包括至少一三维测量模块11,能够测量待清洗物体的三维形状,获取三维数据,能够建立待清洗物体的三维模型,尤其是物体表面的三维模型。包括至少一清洗方案生成模块13,能够根据物体的三维模型生成清洗方案。包括至少一清洗控制模块14和至少一清洗执行模块15。清洗控制模块能够根据清洗方案控制清洗执行模块对物体实施清洗操作。包括至少一定位模块19,能够确定清洗装置和待清洗物体之间的位置关系。清洗装置包括至少一清洗装置固定机构12,固定机构能够把清洗装置固定在待清洗物体上,或者固定在与待清洗物体保持恒定位置关系的位置处,以保证在清洗过程中清洗装置与物体之间的位置恒定。固定机构能够通过机械连接的方式固定在物体上。当清洗装置被用于清洗牙齿时,固定机构包括至少一与牙齿上下咬合面啮合的连接块,连接块能够被咬合在上下牙齿之间。连接块的上表面形状与上牙选定位置的咬合面相匹配,连接块的下表面形状与下牙预设位置的咬合面相匹配,当上下牙齿咬合时,连接块能够正好被咬合在上下牙齿的选定位置之间,并保证每次咬合的位置都相同。如果咬合的位置发生变动,则连接块与上下牙无法紧密贴合,人会感到不舒服,进而调整连接块的位置,使连接块正好与预先选定的上下牙位置啮合。连接块的上下表面的曲面形态能够根据牙齿的表面形态生成,使连接块与牙齿的啮合位置保持唯一。连接块能够采用柔性材料制造。当连接块被咬合在上下牙之间时,清洗装置与牙齿之间的位置关系保持固定。清洗装置固定机构还能够包括
固定在人头部的支架,该支架能够在多个点位与头部接触并保持支架与头部之间的位置恒定,进而保持清洗装置与牙齿之间的位置恒定。图14中的清洁装置能够用于牙齿的清洁,也能够用于其它物体的清洁。用于牙齿清洁时,清洗执行模块能够包括至少一毛刷,该毛刷能够刷擦牙齿;清洗执行模块能够包括至少一声波刷头;清洗执行模块能够包括至少一牙线收放机构,能够用牙线清理牙缝。优选的清洗装置包括至少两个连接块,第一连接块能够被咬合在左侧上下牙之间,此时清洗装置能够清洗右侧的上下牙齿。第二连接块能够被咬合在右侧上下牙之间,此时清洗装置能够清洁左侧的上下牙齿和前面的牙齿。
30.图15的利用图14的清洗装置清洁牙齿的过程。步骤300,固定清洁装置与牙齿之间的相对位置,保持清洁装置与牙齿的空间位置关系恒定。例如把连接块咬合在牙齿之间,或者把与清洁装置固定连接的支架固定在头部上。步骤311,三维测量模块对牙齿和牙龈进行三维测量,获得牙齿和牙龈的特征信息,特征信息包括牙齿和牙龈的三维形态信息。三维测量模块能够记录多次牙齿和牙龈的三维测量结果,能够记录牙齿最清洁时的测量结果。三维测量模块能够把最新测量结果与过往结果进行比较,能够发现牙齿、牙龈的差异性变化,这些差异性变化包括但不限于牙龈肿胀萎缩、牙齿变形腐蚀、牙齿移位、牙齿表面沉积牙垢食物残渣、牙缝间残留食物残渣。三维测量模块能够把测量的结果上传到服务器和/或上位机/智能手机,通知用户和/或医生。牙齿的三维测量是一种公知技术。清洗装置的三维测量模块能够伸入到口腔中,对牙齿和牙龈进行三维测量。步骤313,清洗方案生成模块和/或三维测量模块能够存储牙齿和牙龈的三维形状信息,能够根据测量发现的牙齿表面的牙垢、食物残渣情况确定需要清理的牙齿位置。步骤400,清洗方案生成模块能够根据特征信息和清洗装置的清洗执行模块的设备信息、特征尺寸以及牙齿的牙垢情况生成牙齿的清洗方案,清洗方案包括但不限于清洗牙齿的顺序、重点清洗部位、清洗操作过程等。步骤521,清洗装置选择一颗待清洗的牙齿。步骤523,确定清洗执行模块与待清洗牙齿之间的位置关系。步骤525,移动清洗执行模块到待清洗的牙齿,清洗该牙齿。清洗牙齿的方式包括但不限于用刷子擦刷牙齿表面、用声波刷头清洗牙齿、用牙线清理牙缝、用抛光转头打磨牙齿等。步骤538,判断是否还有待清洗牙齿,如果有,转到步骤521;如果否,则结束清洗。
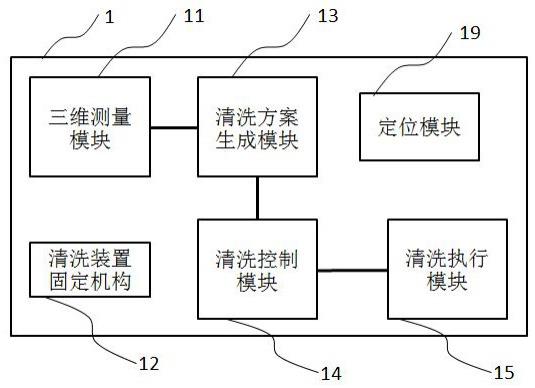
31.图16中,清洗装置1包括至少一固定机构12,固定机构能够连接清洗装置与待清洗物体,并保持清洗装置和物体之间的相对位置恒定。固定机构的连接方式包括但不限于螺栓连接、铆接、插接、负压吸附、磁力吸附、胶接。固定机构和物体之间的位置关系能够被测量出来,当清洗装置被固定地布置在物体表面或附近时,清洗装置与物体的三维位置关系保持恒定并能够测量出来,既清洗装置与物体之间的位置关系已知,并能够由此确定清洗执行模块与物体表面区块自己的位置关系。物体与清洗装置之间的位置关系已知且保持固定。清洗包括至少一清洗控制模块14和至少一清洗执行模块15。清洗控制模块能够存储清洗方案。清洗控制模块中存储有清洗方案。清洗方案能够预先输入,清洗方案能够由服务器和/或上位机输入。清洗方案能够通过如下方式得到,使用三维测量装置对物体进行三维测量,得到物体的三维形态。或者由物体的设计、制造信息中得到物体的三维形态。获取清洗装置的设备信息,包括设备的结构特征尺寸,尤其是清洗执行模块及其子模块的特征尺寸。根据设备信息和物体的三维形态信息生成物体的清洗方案。图16的清洗装置去除了三维测量模块和清洗方案生成模块,能够降低设备成本。清洗装置能够包括至少一定位模块,能够确定清洗装置和物体之间的位置关系。图16的清洗装置能够用于牙齿的清洁。图16的清洗
装置能够用于卫浴洁具等的清洁,清洗装置能够被固定地布置在洁具上。
32.图17中,步骤300,固定清洗装置与物体之间的相对位置,即把清洗装置与待清洗物体固定连接。该固定连接位置关系能够被记录在清洗方案中。清洗装置的清洗控制模块存储有物体的清洗方案。当清洗装置被固定在设定的位置后,清洗装置能够根据清洗方案中记录的物体的特征信息、运动路径遍历物体的每一个表面区块并对该区块进行清洁。步骤521,选择一个表面区块。步骤523,确定清洗执行模块与待清洗区块之间的位置关系。步骤525,移动清洗执行模块到待清洗区块,实施清洗操作。步骤525中能够包括多种清洗操作,即在同一个表面区块按照清洗方案实施多种不同的清洗操作,当所有预设的清洗操作都完成后再转入其它表面区块实施清洗。步骤538,判断是否还有待清洗区块,如果是,则返回步骤521,选择下一个表面区块;如果否,则结束清洗。清洗方案中能够包括多种清洗操作。清洗装置能够对同一表面区块实施多种清洗操作,也能够在多个表面区块实施同一种清洗操作。图17中的清洗过程能够用于牙齿清洗,也能够用于其它物体的清洗。
33.图18中,步骤300,固定连接清洗装置与待清洗物体,即把清洗装置固定布置在物体上。清洗控制模块中存储有清洗方案。步骤520,选择一种清洗操作。步骤521,选择一个待清洗的表面区块。步骤523,确定清洗执行模块与待清洗表面区块之间的位置关系。步骤525,移动清洗执行模块到待清洗表面区块,实施所选清洗操作。步骤538,判断是否还有待清洗区块,如果是,则转入步骤521,如果否,则转入步骤539。步骤539判断是否还有其它清洗操作,如果是,则转入步骤520,如果否,则转入步骤540,结束清洗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1