用于管控机动车辆的内燃发动机的方法与流程
1.本发明涉及一种用于管控机动车辆的内燃发动机的方法、一种用于实施该管控方法的管控设备、一种包括所述设备的内燃发动机以及一种包括这种内燃发动机的机动车辆。
背景技术:
2.为了改进内燃发动机的整体性能,众所周知的实践是为这种内燃发动机提供egr(排气再循环)阀。这种egr阀允许来自所述内燃发动机的排气管的燃烧气体再循环到该同一内燃发动机的进气歧管。将在燃烧期间中不反应的燃烧气体引入到发动机的燃烧室中,使得可以降低燃烧的整体温度,并限制被称为爆燃的现象的出现。这种现象对应于燃烧室中空气/燃料混合物的不期望的自燃,这可能在经过一段时间之后严重损坏所述燃烧室。
3.egr阀的使用对内燃发动机的整体操作具有显著影响。具体地,在具有egr阀的配置中,每个燃烧室中捕集的空气的质量较低,因为燃烧气体代替了所述室中的新鲜空气。为了获得化学计量的空气/燃料混合物(即其中燃料将在燃烧期间在室中被完全消耗的混合物),需要非常精确地知道内燃发动机的进气歧管中的燃烧气体的质量分数(或新鲜气体的质量分数)。燃烧气体的质量分数被理解为空气/燃料混合物中燃烧气体的比例。然后,使用该参数来最佳地控制egr阀。然而,使用传统的物理传感器难以测量燃烧气体的质量分数。
4.文件fr 2981404描述了一种基于对进气歧管中的燃烧气体的质量分数的估计来管控内燃发动机的方法。更具体地,燃烧气体的质量分数是根据对存在于进气歧管上游的一定体积的混合物中的燃烧气体的基于质量的估计并基于传输延迟来确定的。传输延迟对应于将一定体积的混合物传输到进气歧管所花费的时间。这对应于内燃发动机内部的空气/燃料混合物的输送中的动态函数。该传输延迟通过根据热力学条件分割进气管线并对每个段应用层流定律来估计。因此,文件fr 2981404作出如下假设:每个区域内的热力学条件是稳定的或者这些热力学条件是线性变化的。现在,内燃发动机能够与输出参数与输入参数不成比例的非线性系统进行比较。因此,由文件fr 2981404作出的对燃烧气体的质量分数的估计包含一定的不精确性,这可以证明与未来的用于汽油发动机的欧洲排放标准(例如,未来的殴7标准)不兼容。
5.因此,仍然需要提出一种用于管控机动车辆的内燃发动机的方法,该方法执行得更好,特别是通过以更高的精度水平确定在所述内燃发动机的进气歧管中的燃烧气体的质量分数来执行。
技术实现要素:
6.本发明寻求至少部分地满足这种需要。
7.更具体地,本发明寻求改进对内燃发动机的进气歧管中的燃烧气体的质量分数的估计。
8.本发明的第一主题涉及一种用于管控机动车辆的内燃发动机的方法,所述内燃发
动机包括多个部件,诸如进气歧管、至少一个燃烧室、egr阀,所述控制方法包括:
[0009]-接收与所述内燃发动机有关的多个第一操作参数和被称为测量参考参数的第一参考参数的步骤;
[0010]-基于多个第一操作参数中的全部或一些,使用神经网络估计所述内燃发动机的至少第二操作参数和被称为估计参考参数的第二参考参数的步骤;
[0011]-使用扩展卡尔曼滤波器修正至少第二操作参数以获得至少修正的第二操作参数的步骤,所述修正步骤包括在测量参考参数与估计参考参数之间进行比较,以便确定修正增益,该至少第二操作参数的修正是所述修正增益的函数;
[0012]-基于该至少修正的第二操作参数:
[0013]-控制内燃发动机的多个部件中的至少一个部件(诸如进气歧管的入口处的进气门和/或所述egr阀)的步骤;并且/或者
[0014]-估计至少第三操作参数(诸如污染物的排放水平或离开燃烧室的气体的温度)的步骤。
[0015]
因此,对进气歧管中的燃烧气体的质量分数的估计由神经网络执行。根据定义,神经网络是一种架构,其设计受生物神经元操作的启发。神经网络是能够通过应用归纳原理进行学习、也就是说通过经验进行学习的架构。神经网络通常由一连串的层组成,这些层中的每个层从前一层的输出获取其输入。每个层(i)由ni神经元组成,因此从前一层的n
i-1
神经元获取它们的输入。通过适当的学习,神经网络将能够归纳内燃发动机的非线性操作,以便从中提取线性化的操作。扩展卡尔曼滤波器是能够修正不完整或有噪声的测量误差的无限脉冲响应滤波器。这是一种滤波器,其操作在可能看起来是线性的非线性系统的值的范围上是最优的。因此,扩展卡尔曼滤波器特别适合于由神经网络估计的参数。该滤波器使用修正增益来修正由神经网络估计的所有或一些参数。该修正增益通过在测量参考参数与由神经网络估计的参考参数之间进行比较来确定。为了确定该修正增益,扩展卡尔曼滤波器环回到能够由物理传感器测量的受控参数,诸如进气歧管中的压力。通过神经网络和扩展卡尔曼滤波器的组合使用,改进了对进气歧管中的燃烧气体的质量分数的估计,并且更一般地,改进了内燃发动机的管控。因此,本发明使得可以实现+/-2点(与现有技术中的+/-5点对照)的燃烧气体的质量分数的估计精度水平。
[0016]
在一个特定实施例中,神经网络是递归神经网络。
[0017]
递归神经网络是具有优异数据压缩特性的神经网络。因此,它能够存储针对给定参数捕获的较早值的长列表,并且能够捕获其动态现象,因此使得可以估计其未来值。
[0018]
在一个特定实施例中,递归神经网络包括短期记忆层。
[0019]
短期记忆层(称为lstm,其代表“长短期记忆”)是神经元的特定架构,其尤其用于深度学习领域中。这是一种在基于时间的序列(诸如语音或视频)的回归或分类中常规使用的架构。典型地,短期记忆层包括多个“特征”单元。每个特征单元包括子元件,诸如一个或多个输入门、一个或更多个输出门和一个或多个遗忘门。使用这些各种门,短期记忆层能够最佳地捕获空气传输到内燃发动机的进气歧管的延迟的动态效果。更具体地,短期记忆层由多个动态(可变)内部状态x来定义。因此,该lstm层能够捕获发动机的非线性动态现象。这些现象在很大程度上是产生污染物的原因。
[0020]
在一个特定实施例中,神经网络包括连接到所述短期记忆层的至少一个全连接
层。
[0021]
神经网络的全连接层是包括多个神经元的层,每个神经元连接到前一层(也就是在本实例中的短期记忆层)的神经元。这使得可以创建众多连接,可以将要校准的权重应用于这些连接,以最佳地捕获内燃发动机的操作。因此,这些众多连接使得可以最佳地捕获所述内燃发动机的操作的非线性,以便从中提取线性化的操作。
[0022]
在另一特定实施例中,第一操作参数从包括以下项的第一操作参数列表中选择:
[0023]-内燃发动机速度;
[0024]-喷射到所述内燃发动机中的燃料量;
[0025]-新鲜空气进气蝶阀的位置;
[0026]-egr阀的位置;
[0027]-进气歧管的入口处的进气门的位置:
[0028]-涡轮增压器的涡轮的叶片的位置。
[0029]
因此,可以将内燃发动机的操作的一组参数特性作为输入引入神经网络,这些参数中的每个参数都可以使用所述内燃发动机中的物理传感器来测量。
[0030]
在另一实施例中,该至少一个第二操作参数从包括以下项的第二操作参数列表中选择:
[0031]-进气歧管中的压力;
[0032]-所述进气歧管中的温度;
[0033]-所述进气歧管中的燃烧气体的质量分数或新鲜气体的质量分数;
[0034]-新鲜空气流速;
[0035]-通过egr阀的流速;
[0036]-排气歧管中的压力;
[0037]-所述排气歧管中的温度;
[0038]-在涡轮增压器的压缩机之前的管道的一定体积中的压力;
[0039]-在所述涡轮增压器的压缩机之前的所述体积中的燃烧气体的质量分数。
[0040]
因此,可以在神经网络的输出处获得另一组参数。估计了该其他组的参数。具体地,这些参数难以使用内燃发动机中的常规物理传感器来测量。
[0041]
在另一实施例中,第一参考参数是进气歧管中的测量压力,并且第二参考参数是所述进气歧管中的估计压力。
[0042]
因此,基于进气歧管中的测量压力或估计压力,可以在管控方法的修正步骤中确定修正增益。
[0043]
本发明的另一主题是一种用于管控机动车辆的内燃发动机的管控设备,所述内燃发动机包括多个部件,诸如进气歧管、至少一个燃烧室、egr阀,所述管控设备包括:
[0044]-用于接收与所述内燃发动机有关的多个第一操作参数和被称为测量参考参数的第一参考参数的装置;
[0045]-神经网络,该神经网络用于基于多个第一操作参数中的全部或一些,估计与所述内燃发动机有关的至少第二操作参数和被称为估计参考参数的第二参考参数;
[0046]-扩展卡尔曼滤波器,该扩展卡尔曼滤波器用于修正该至少第二操作参数以便获得至少修正的第二操作参数,所述滤波器被设计成在该测量参考参数与估计参考参数之间
作出比较,以便确定修正增益,该至少第二操作参数的修正是所述修正增益的函数;
[0047]-控制装置,该控制装置用于基于该至少修正的第二操作参数,控制内燃发动机的多个部件中的至少一个部件,诸如进气歧管的入口处的所述进气门和/或述egr阀;和/或
[0048]-用于基于该至少修正的第二操作参数来估计至少第三操作参数(诸如污染物的排放水平或离开燃烧室的气体的温度)的装置。
[0049]
以非线性方式操作的系统的处理(诸如内燃发动机的操作)在计算能力方面不是非常苛刻。此外,神经网络具有优异的数据压缩特性,并因此占用的内存非常小。结果,包含这种神经网络和扩展卡尔曼滤波器的用于管控内燃发动机的设备被简化,并且其在机动车辆中所占据的空间是有限的。此外,扩展卡尔曼滤波器能够采用非线性模型,因为扩展卡尔曼滤波器的算法在计算的每个步骤中将这些非线性模型线性化。当神经网络是递归神经网络时,神经网络的该线性化被改进。在一个特定实施例中,递归神经网络包括短期记忆lstm层。有利地,递归神经网络还包括连接到所述短期记忆层的至少一个全连接层。将短期记忆层与至少一个全连接层组合形成非线性神经网络模型,然后能够通过扩展卡尔曼滤波器将非线性神经网络模型线性化。通过短期记忆lstm层和至少一个全连接层中保留的激活函数的特性,使得这种神经网络的线性化成为可能。
[0050]
本发明的另一主题是一种内燃发动机,其包括egr阀和根据本发明的前述其他主题的用于管控所述内燃发动机的管控设备。
[0051]
在另一实施例中,内燃发动机是汽油发动机,尤其与自欧7开始的欧洲排放标准可兼容。
[0052]
在另一实施例中,内燃发动机的egr阀是低压egr阀。
[0053]
本发明的另一主题是一种机动车辆,其包括根据前述主题之一的内燃发动机。
附图说明
[0054]
通过阅读由附图所展示的并且由完全非限制性示例的方式作出的一些实施例的详细说明将更好地理解本发明,在附图中:
[0055]
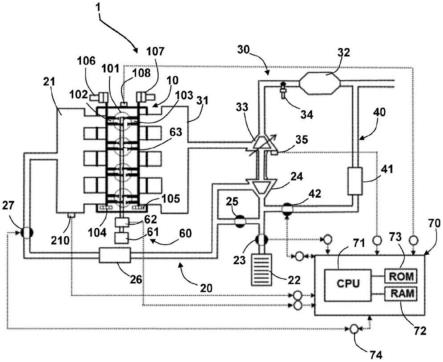
图1是根据本发明的内燃发动机的示意图;
[0056]
图2是用于管控图1的内燃发动机的管控设备的示意图;
[0057]
图3描绘了由图2的管控设备实施的用于管控图1的内燃发动机的管控方法的步骤。
具体实施方式
[0058]
本发明不限于所呈现的实施例和变型,并且其它实施例和变型对于本领域的技术人员将是显而易见的。
[0059]
在各个附图中,相同或相似的元件具有相同的附图标记。
[0060]
图1示意性地描绘了根据本发明的内燃发动机1。
[0061]
在本说明书中,术语“上游”和“下游”将根据从新鲜空气被捕获的点到燃烧气体离开机动车辆的点的气体流动通过该发动机的方向来使用。
[0062]
图1更具体地描绘了机动车辆的内燃发动机1,该内燃发动机包括此处设置有四个燃烧室101的发动机缸体10。每个燃烧室101与两个入口阀102和两个出口阀103相关联。入
口阀102和出口阀103管控空气的进入和燃烧气体的出口。这些阀102、103分别连接到第一曲轴104和第二曲轴105,这些曲轴旨在管控所述阀102、103在燃烧室101中的往复运动。还将注意到,每个曲轴104、105分别连接到可变升程进气门系统106和可变升程排气门系统107。内燃发动机1还包括用于感测该内燃发动机的速度的传感器108。该传感器108能够发送与所述内燃发动机1的速度rm有关的数据。
[0063]
该发动机在本实例中是受控点火(汽油)发动机。
[0064]
在燃烧室101的上游,内燃发动机1包括进气管线20,该进气管线从大气中获取新鲜空气并通向进气歧管21,该进气歧管被设计成将进气气体分配到发动机缸体10的四个燃烧室101中的每个燃烧室。进气歧管21包括进气传感器210,该进气传感器被设计成传递与在进气歧管21中测量的压力p
col mes
有关的数据。
[0065]
该进气管线20在气体的流动方向上包括:空气过滤器22,其过滤从大气中获取的新鲜空气;新鲜空气进气蝶阀23,其能够调整进气管线20中的新鲜空气的流速;压缩机24,其压缩气体;增压压力传感器25,其被设计成测量空气进气压力,以便调节喷射到燃烧室101中的燃料的量;主空气冷却器26,其冷却由压缩机24压缩的气体;进气门27或高压阀,其能够向进气歧管21供应空气。新鲜空气进气蝶阀23被设计成传递与所述蝶阀23的位置α有关的数据。进气门27被设计成传递与所述进气门27的位置δ有关的数据。
[0066]
在燃烧室101的出口处,内燃发动机1包括从排气歧管31延伸到颗粒过滤器32的排气管线30,先前在燃烧室101中燃烧的气体通向该排气歧管,该颗粒过滤器能够在燃烧气体被排放到大气中之前将颗粒物质从燃烧气体中过滤出来。
[0067]
该排气管线30在燃烧气体的流动方向上包括涡轮33和宽带uego(“通用排气氧”)探头34,涡轮由离开排气歧管31的燃烧气体流驱动旋转,宽带uego探头使得可以监测燃烧的质量,并且尤其是任何燃料是否残留在离开燃烧室101的燃烧气体中。
[0068]
此处,涡轮33通过诸如传动轴等机械联接装置而被联接到压缩机24,使得压缩机24与涡轮33一起形成涡轮增压器。
[0069]
涡轮33在本实例中由于其包括叶片而具有可变的几何形状,这些叶片安装成具有绕它们的纵向轴线枢转的能力,从而展现出可变的节距。这些叶片的节距在本实例中由诸如步进电机等致动器35连续地调节,从而允许压缩机24以更大或更小的转速被驱动。致动器35还被设计成传递与涡轮33中的叶片的位置ε有关的数据。
[0070]
内燃发动机1进一步包括低压燃烧气体再循环管线40。该再循环管线通常被称为egr-lp(“排气再循环低压”)管线40。该再循环管线40在颗粒过滤器32之后的排气管线30处开始,并通向新鲜空气进气蝶阀23与压缩机24之间的进气管线20。该egr-lp管线40允许在排气管线30中循环的一些燃烧气体被排出并重新喷射到燃烧室101中,以便减少发动机的污染物排放,特别是氮氧化物排放。
[0071]
该egr-lp管线40包括用于冷却燃烧气体的分流部分的二次空气冷却器41、用于调整通向进气歧管21的燃烧气体的流速的低压egr阀42。低压egr阀42被设计成传递与所述egr阀42的位置β有关的数据。
[0072]
内燃发动机1还包括用于将燃料喷射到燃烧室101中的喷射管线60。该喷射管线60包括燃料储存器61、喷射泵62和分配管线组63,喷射泵被设计成从储存器61获取燃料以压缩燃料,分配管线组允许将该燃料分配到分别通向四个燃烧室101的四个喷射器(未描绘)。
喷射泵62还被设计成供应与喷射到所述内燃发动机1中的燃料的量car有关的数据。
[0073]
为了控制内燃发动机1的各种部件,提供了内燃发动机管控设备70。该管控设备70是包括处理器(cpu)71、随机存取存储器(ram)72、只读存储器(rom)73、模拟数字转换器74以及各种输入和输出接口的计算机。
[0074]
借助于这些输入和输出接口以及集成到内燃发动机中的各种传感器(内燃发动机速度传感器108、喷射泵62、新鲜空气进气蝶阀23、低压egr阀42、进气门27、致动器35、进气传感器210)。这些各种集成传感器108、62、23、42、27、35、210被设计成将与燃烧发动机1有关的第一操作参数rm、car、α、β、δ、ε、p
col mes
传递到管控设备70。这些各种参数的传输由指向所述管控设备70的虚线箭头指示。管控设备还被设计成将控制数据传输到内燃发动机1的某些部件,诸如进气门27和/或低压egr阀42。这些控制数据的传输由从管控设备70开始并指向所述受控部件27、42的虚线箭头指示。
[0075]
图2示出了管控设备70的处理器71。此处,该处理器71包括:
[0076]-接收装置710;
[0077]-神经网络711;
[0078]-扩展卡尔曼滤波器712;
[0079]-控制装置713;
[0080]-估计装置714。
[0081]
接收装置710被设计成接收与内燃发动机1有关的多个第一操作参数rm、car、α、β、δ、ε以及第一参考参数,该第一参考参数被称为测量参考参数p
col mes
,对应于由进气传感器210测量的进气歧管21中的测量压力。接收装置710被设计成将多个第一操作参数rm、car、α、β、δ、ε传输到神经网络711。接收装置710还被设计成将测量参考参数p
col mes
传输到扩展卡尔曼滤波器。
[0082]
神经网络711被设计成基于第一操作参数rm、car、α、β、δ、ε来估计与内燃发动机1有关的至少第二操作参数和被称为估计参考参数的第二参考参数。此处第二操作参数对应于所述进气歧管21中的燃烧气体的质量分数f
col
。第二参考参数对应于所述进气歧管21中的估计压力p
col est
。神经网络711在本实例中是递归神经网络。更具体地,该神经网络711包括短期记忆层和连接到所述短期记忆lstm层的至少一个全连接层。短期记忆层允许预测随后将由一个或多个全连接层消耗的中间(非物理)量值。短期记忆层允许捕获系统的动态性,特别是产生氮氧化物nox中的动态性。一个或多个全连接层馈出短期记忆层的输出,即非物理中间量值。如果几个全连接层堆叠在一起,则这些层彼此交换非物理量值。这些全连接层允许通过结合输入的影响来捕获产生氮氧化物中的非线性。来自最后一个全连接层的输出将允许对氮氧化物的排放进行建模。
[0083]
因此,神经网络711被感知为类似于常规的但非线性的状态模型。首先,预测神经网络的内部状态x,并然后其次预测输出量值y。然后,这给出了以下方程组:
[0084][0085]
y=g(x,u)
[0086]
其中,x是内部状态,u是系统的输入,以及y是输出。是状态x相对于时间的导数。
函数f和函数g是非线性函数,它们是要建模的现象的模型。神经网络711将从输入u预测状态x和输出y。
[0087]
这些神经元层的组合使得可以考虑延迟现象和相当非线性的现象,这尤其归功于短期记忆层的功能和遗忘门。因此,容易在每个时刻从该神经网络711中提取线性化。具体地,神经网络711形成非线性模型,但其在操作点处的系数可以被放回线性状态模型的形式中,其中:中,其中:其中,a和b是从具有的神经网络711中提取的模型的矩阵,其中,h
t
表示时刻t的隐藏状态。此外,输出y能够根据方程y=c*x+d*u来写入,其中,c和d也是矩阵。归功于神经网络711的特性,线性化是动态执行的。
[0088]
在一个特定实施例中,神经网络711包括:包含33个神经元的第一短期记忆层。该神经元层被设计成处理5秒至10秒的数据序列。具体地,每个门具有允许其打开和关闭以便对信号执行增益型操作的参数。最慢的动态效应由最长序列的长度定义。在该实施例中,神经网络711还包括第二全连接层和第三全连接层。第二层和第三层分别包含33个神经元。
[0089]
关于神经网络711的学习,短期记忆层被设计成从物理模型或直接从测试中学习。在所谓的离线学习的情况下,学习方法可以在三个步骤中执行。在第一步骤中,根据发动机测试台或车辆上的测试,构造并识别0d型的物理模型。0d模型是具有零空间维度的模型,仅考虑时间。这种物理模型是例如使用amesim工具产生的。然后,该模型成为参考,并在诸如wltc或rde驾驶循环等稳定和瞬态测试中进行验证。
[0090]
在第二步骤中,对该0d模型执行动态数值实验计划。这允许测试大量的组合,从而准许获取比单独使用物理测试所实现的更宽的学习基础。因此,可以在发动机操作的极限下进行测试,但由于存在破裂的风险而无法在实际发动机测试台上进行。基于这些在极限下的虚拟测试,可以使神经网络学习不超越这些极限。例如,神经网络可以学习不超过涡轮增压器最大速度约束。此外,在0d模型中,可以添加本领域的规则,然后这些规则将被神经网络学习。
[0091]
在第三步骤中,在0d模型的输入/输出已经归一化或标准化之后,使神经网络的短期记忆层学习。该学习是通过分解序列并定义短期记忆层的架构来执行的。实际测试或虚拟测试是在标准(nedc、wltc、rde等类型)中设定的驱动轮、操纵、循环。这些循环被分解成持续约为5秒至10秒的序列。为了执行这些序列,可以使用adam的解算器。
[0092]
该提出的3步方法涉及在开始时使用物理模型,以便预校准神经网络711。然后,通过对神经网络的学习算法提供虚拟测试,使操作域更广泛地覆盖。单独使用实际测试将过于昂贵,有损坏发动机的风险。
[0093]
然后,神经网络711向扩展卡尔曼滤波器发送至少第二操作参数和被称为估计参考参数的第二参考参数。该第二操作参数从包括以下项的第二操作参数列表中选择:
[0094]-所述进气歧管21中的温度t
col
;
[0095]-所述进气歧管21中的燃烧气体的质量分数f
col
;
[0096]-新鲜空气流速q
空气
;
[0097]-通过egr阀的流速q
egr
;
[0098]-排气歧管中的压力p
echap
;
[0099]-所述排气歧管中的温度t
echap
;
[0100]-在涡轮增压器的压缩机24之前的管道的一定体积中的压力pc;
[0101]-在所述涡轮增压器的压缩机24之前的所述体积中的燃烧气体的质量分数fc。
[0102]
在图2的实施例中,经由神经网络711传输的第二操作参数是进气歧管21中的燃烧气体的质量分数f
col
,并且传输的第二参考参数是所述进气歧管21中的估计压力p
col est
。扩展卡尔曼滤波器能够通过将该修正环回到受控的测量值(诸如进气歧管21中的压力p
col mes
的测量值)上来修正不可测量的量(诸如进气歧管21中的燃烧气体的质量分数)。扩展卡尔曼滤波器712在两个阶段中操作。第一阶段是预测阶段,其涉及求解以下方程:
[0103]
xp=a*x+b*u(预测状态的估计)
[0104]
pp=a*p*a’+q(预测协方差的估计)
[0105]
在修正的第二阶段中,扩展卡尔曼滤波器712涉及求解以下方程:
[0106]
y=z
–
h*xp(新息或残差测量值)
[0107]
s=h*pp*h’+r(新息或协方差的测量值)
[0108]
k=pp*h’*s^-1(近似最优卡尔曼增益)
[0109]
x=xp+k*y(更新状态的估计)
[0110]
p=(i
–
k*y)*pp(更新协方差的估计)
[0111]
在这些方程中:
[0112]-a和b是从神经网络711中提取的模型的矩阵;
[0113]-xp和x是扩展卡尔曼滤波器在时刻t+1和时刻t的状态;
[0114]-pp和p是在时刻t+1和时刻t的协方差矩阵;
[0115]-z是环回测量值(压力p
col mes
的测量值);
[0116]-h是基于状态x的传感器模型;
[0117]-q和r是包含测量噪声和建模噪声的概念的调谐矩阵;
[0118]-i是单位矩阵,其沿对角线都为1,并且在矩阵的其余部分中为零值。
[0119]
在扩展卡尔曼滤波器712中要校准的唯一参数是矩阵q和r。r是与建模噪声相关的矩阵。该矩阵根据模型精度的估计被校准。假设模型被归一化或标准化,也就是说所有值都在-1与1之间,则矩阵r被限制为具有要校准的乘法系数的对角矩阵。矩阵r的该系数是凭经验确定的。因此,起始点是同一估计器的第一应用的初始值,并且对其进行优化以使相对于实际测试的收敛性最大化。还将注意到,r是以与在扩展卡尔曼滤波器中弹出的进气歧管中的测量压力pcol相同的方式反映在内燃发动机上的测量精度。q是与测量噪声相关的矩阵,并且根据传感器的精度水平被校准。例如,对于测量进气歧管21中的进气压力p
col mes
的进气传感器210,可以假设精度为+/-5%。
[0120]
换句话说,扩展卡尔曼滤波器712包括比较装置7121和修正装置7122。比较装置7121被设计成在由接收装置710传输的测量参考参数p
col mes
与由神经网络711传输的估计参考参数p
col est
之间作出比较。该比较使得可以确定修正增益k。基于该修正增益k,修正装置7122被设计成修正第二操作参数f
col
,以便获得修正的第二操作参数f
col cor
。然后,将修正的第二操作参数f
col cor
传输到控制装置713。该控制装置被设计成根据修正的第二参数将指令传输到进气门27和/或egr阀42。在图2的实施例中,处理器71还包括估计装置714。这些估计装置714被设计成基于修正的第二参数来估计第三操作参数(诸如污染物的排放水平或离开燃烧室的气体的温度),以便防止涡轮33处过热。
[0121]
图3展示了根据本发明的用于管控机动车辆的内燃发动机1的方法,所述内燃发动机1包括多个部件,诸如进气歧管21、至少一个燃烧室101和egr阀42。该控制方法包括:
[0122]-接收与所述内燃发动机1有关的多个第一操作参数rm、car、α、β、δ、ε和被称为测量参考参数p
col mes
的第一参考参数的步骤e1;
[0123]-基于多个第一操作参数rm、car、α、β、δ、ε中的全部或一些,使用神经网络711估计所述内燃发动机1的至少第二操作参数f
col
和被称为估计参考参数p
col est
的第二参考参数的步骤e2;
[0124]-使用扩展卡尔曼滤波器712修正该至少第二操作参数f
col
以获得至少修正的第二操作参数f
col cor
的步骤e3,所述修正步骤包括在测量参考参数p
col mes
与估计参考参数p
col est
之间进行比较,以便确定修正增益k,该至少第二操作参数f
col
的修正是所述修正增益k的函数;
[0125]-基于该至少修正的第二操作参数f
col cor
:
[0126]-控制内燃发动机的多个部件中的至少一个部件(诸如进气歧管21的入口处的进气门27和/或所述egr阀42)的步骤e4;以及/或者
[0127]-估计至少第三操作参数(诸如污染物的排放水平或离开燃烧室的气体的温度)的步骤e5。
[0128]
在优选实施例中,神经网络711是递归神经网络。有利地,递归神经网络711包括短期记忆层。
[0129]
在一个优选实施例中,神经网络711包括连接到所述短期记忆层的至少一个全连接层。
[0130]
修正步骤e3由扩展卡尔曼滤波器712执行。
[0131]
在优选实施例中,第一操作参数从包括以下项的第一操作参数列表中选择:
[0132]-内燃发动机速度rm;
[0133]-喷射到所述内燃发动机1中的燃料量car;
[0134]-新鲜空气进气蝶阀的位置α;
[0135]-egr阀的位置β;
[0136]-进气歧管的入口处的进气门的位置δ;
[0137]-涡轮增压器的涡轮的叶片的位置ε。
[0138]
在一个优选实施例中,至少一个第二操作参数从包括以下项的第二操作参数列表中选择:
[0139]-所述进气歧管21中的温度t
col
;
[0140]-所述进气歧管21中的燃烧气体的质量分数f
col
;
[0141]-新鲜空气流速q
空气
;
[0142]-通过egr阀的流速q
egr
;
[0143]-排气歧管中的压力p
echap
;
[0144]-所述排气歧管中的温度t
echap
;
[0145]-在涡轮增压器的压缩机24之前的管道的一定体积中的压力pc;
[0146]-在所述涡轮增压器的压缩机24之前的所述体积中的燃烧气体的质量分数fc。
[0147]
作为优选,第一参考参数是进气歧管21中的测量压力p
col mes
,并且第二参考参数
是所述进气歧管21中的估计压力p
col est。
[0148]
本发明的另一主题是内燃发动机1,其包括egr阀42和用于管控所述内燃发动机1的管控设备70。
[0149]
作为优选,内燃发动机1是汽油发动机,尤其是与欧7欧排放标准可兼容的发动机。
[0150]
作为优选,所述内燃发动机1的egr阀42是低压egr阀。
[0151]
本发明的另一主题是包括内燃发动机1的机动车辆。
[0152]
本发明不限于所呈现的实施例和变型,并且其它实施例和变型对于本领域的技术人员将变得显而易见的。
[0153]
因此,扩展卡尔曼滤波器的环回参数可以不同于歧管中的压力。该环回参数可以是第一操作参数列表中的任何参数。
[0154]
因此,修正参数可以不同于压缩机24之前的一定体积中的燃烧气体的质量分数。该修正参数可以是第二操作参数列表中的任何参数。
[0155]
因此,神经网络711的学习步骤不是离线的,而是直接在机动车辆上进行的。
[0156]
因此,内燃发动机是包括低压egr阀和高压egr阀的柴油发动机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1